DCモータ RE-280RA で倒立振子作製
本記事にはアフィリエイト広告が含まれます。
先日はDCモータ RE-280RA を用いて姿勢制御モジュールを製作し、起き上がり倒立を実現しました。
DCモータで起き上がり倒立が実現できた。
かなり過保護に底面丸くしてるけど 一歩前進 pic.twitter.com/dr21rUSIuM— HomeMadeGarbage (@H0meMadeGarbage) June 20, 2023
RE-280RA の軽量な割にパワフルでかつ低速時の繊細な動作が確認出来たので、今回はコチラをつかって倒立振子を試してみようと思いました。
目次
筐体製作&味見
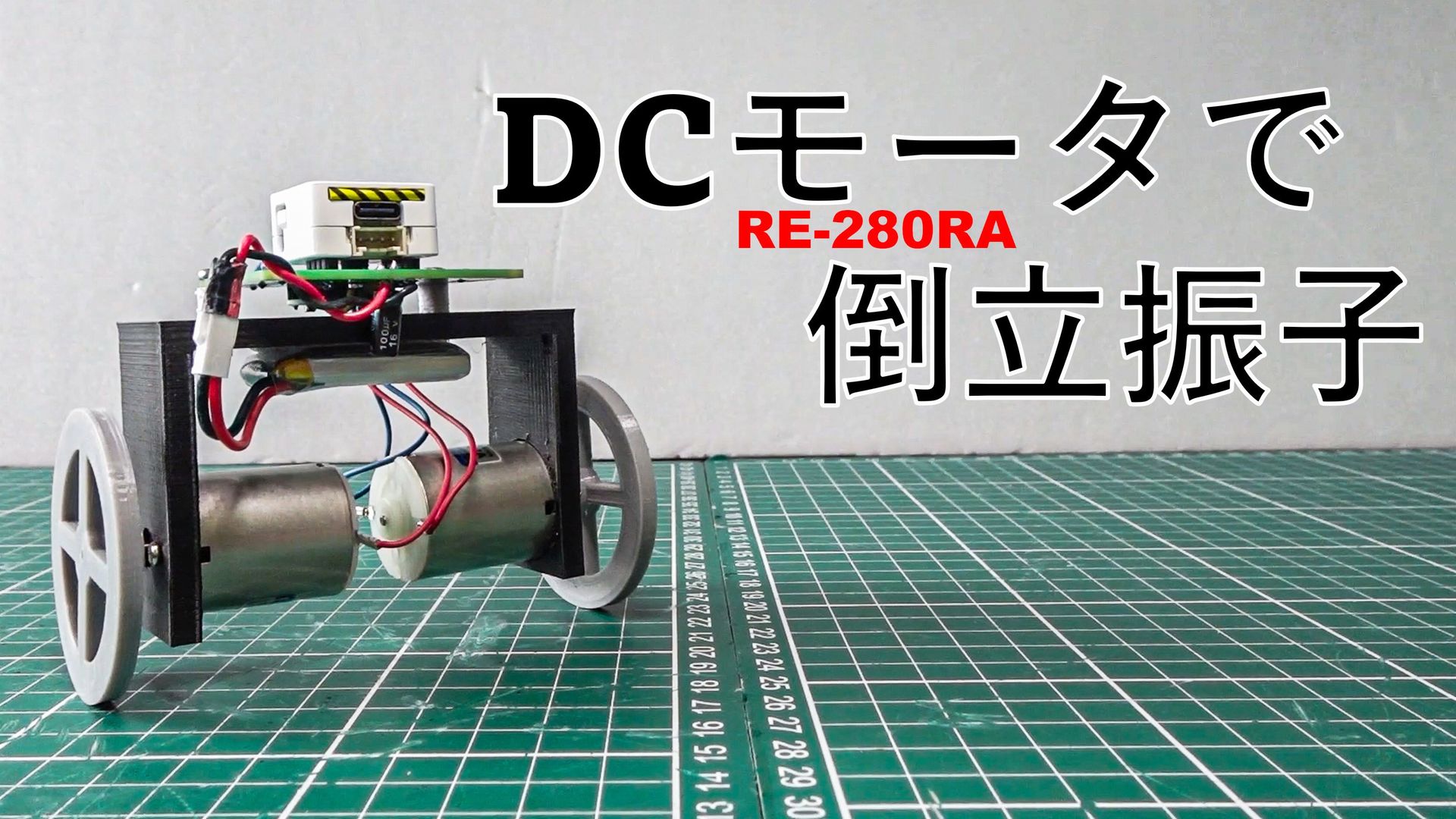
早速、筐体を3Dプリンタで作製。
またなんかしようとして pic.twitter.com/3nhu69llan
— HomeMadeGarbage (@H0meMadeGarbage) June 30, 2023
車輪は姿勢制御モジュールのホイールをまんま使い。
コントロール機構も姿勢制御モジュールのモノをそのまま使って味見
最近私との距離が縮まったモータ RE-280RA で倒立振子を味見
まだ片方しか駆動してないのだけど元気元気https://t.co/xGUdR8EgXs pic.twitter.com/IoYphmeThN— HomeMadeGarbage (@H0meMadeGarbage) July 1, 2023
上の動画ではモータを一個だけ接続して (姿勢制御モジュールの基板をそのまま流用しているため) とりあえず動作させてみました。
電源として1セル小型LiPoバッテリ(3.7V)を使用。
制御方法も姿勢制御モジュールと同様で機体の角度と角速度とホイールの回転速度をフィードバックさせています。
機体の角度と角速度はM5ATOM S3に内蔵のIMUセンサで測り、ホイールの回転速度はセンサがないのでモータに印可するPWM信号のデューティー比で代用してみました。
外乱を与えるとクルクルと暴走気味でしたが、転ばずに倒立しているので応答性も良いみたいで RE-280RA への期待が高まりました。
次に他方のモータも並列につないで同じ信号で同相で動かしました。
無事に倒立動作が実現されました。
信号線分ける前に同信号で前後走行確認 pic.twitter.com/vB35nPcLKk
— HomeMadeGarbage (@H0meMadeGarbage) July 1, 2023
DCモータ直接駆動でも倒立動作が割と容易にできることに驚きました。
希望が拡がって大変嬉しいです。
モータ駆動方式改善
2つへのモータをそれぞれ駆動できるようにして、倒立振子を縦横無尽に動かせるようにします。
制御基板は姿勢制御モジュール用のモノを使用しており、モータドライバには DRV8835 を採用しています。
DRV8835 はモータを2個駆動できるドライバで姿勢制御モジュールでは2出力をパラにして電流能力を上げて使用しておりました。
ここでは信号線と出力を分けてモータを2個駆動できるように基板を加工します。
基板の配線の断絶の仕方
・カッターで2か所切る
・切った個所をハンダで熱する
・ヌルっと切った配線材がとれる pic.twitter.com/dzFWBGLNLf— HomeMadeGarbage (@H0meMadeGarbage) July 1, 2023
基板加工によって左右のモータをそれぞれ駆動できるようになったので、早速 倒立振子動作を試す。
モータそれぞれ別で駆動できるようにした。
なんか回転し始めの抵抗的なものがそれぞれ違うので思い通りに動かせない。。
回転速度センシングしてないしなぁ左右で制御パラメータかえて調整でいけるべか?
要検討ちなみにモータドライバはDRV8835https://t.co/xCG7XJKjf1 pic.twitter.com/zU4JuAKUqT
— HomeMadeGarbage (@H0meMadeGarbage) July 1, 2023
左右の独立駆動によって旋回もできるようになりました (地味にホイールも専用に印刷し直した)。
しかしなんだか動作が ぎこちなく やはりホイールの回転速度をキッチリ測りたい気持ちになる。。
制御方法検討
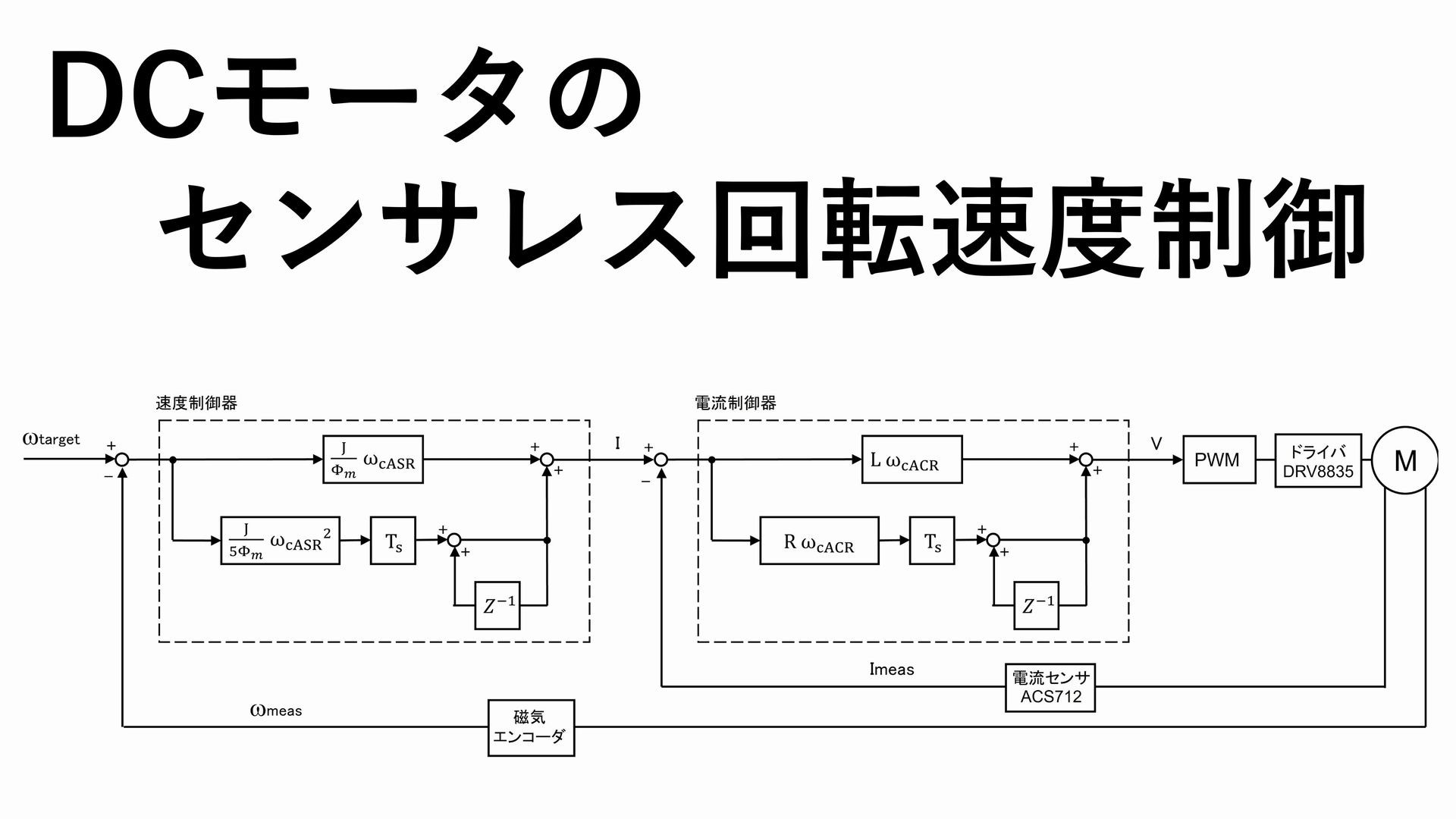
姿勢制御モジュールの制御を踏襲した駆動がなんだかイマイチな感じがしたので以下の記事を参考に制御方法を検討しました。
上の記事ではホイール回転速度をモータ印可電圧の積算としてフィードバックしておりマネして採用してみました。
動作が安定して非常にコントロールしやすくなりました。
当初 ホイール速度をモータに印可するPWM信号のデューティー比で代用してフィードバックしていましたが前述の記事を参考にデューティー比の積算に変えてみたところ安定したのです。
ホイール回転速度がモータ印可電圧の積算で代用 (記事ではホイールによる移動距離を電圧の積算の積算としている) できる点が直感的には理解できてないのですが、実際いい感じなので ここではとりあえず飲み込んで後で勉強することにします。
おわりに
ここではDCモータ RE-280RA を用いて倒立振子を製作しました。
入手しやすいモータで気軽に倒立振子を楽しめるのは嬉しいことですよね。
次回はこのモータで駆動する屈伸タイプに挑戦したいと考えております。
またねー