M5Stack BLDCモータードライバユニット DRV11873 おイジり
本記事にはアフィリエイト広告が含まれます。
前回はM5Stack用BLDCモータードライバユニットの味見動作の確認を実施しました。
迅速な回転方向転換や低速での起動が難しく倒立振子への利用は難しいことが分かったのですが、せっかくなので分解して深堀したので報告します。

分解
M5Stack用BLDCモータードライバユニットに搭載されているドライバIC DRV11873 に触れるべく分解しました。

ユニットの回路構成は以下のとおり
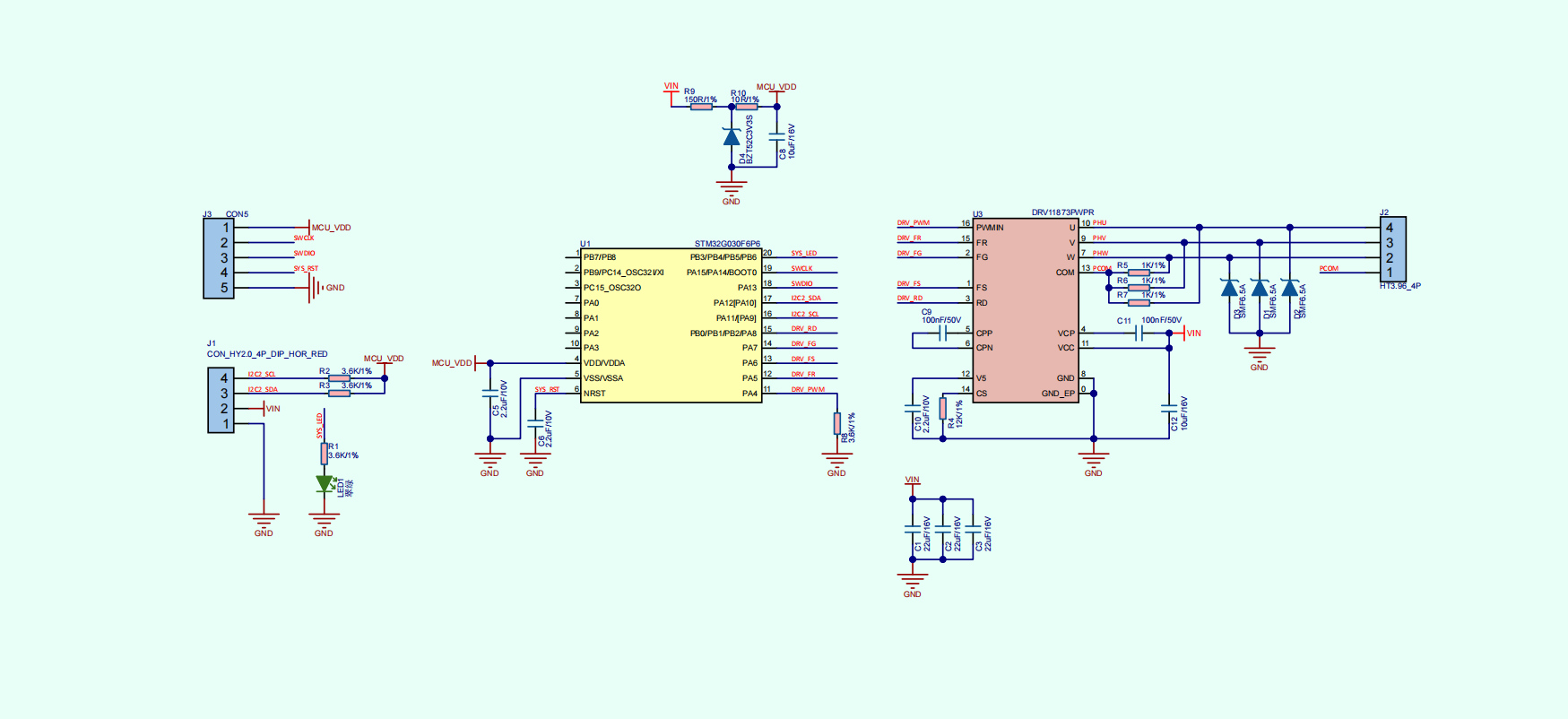
参考:公式ドキュメントページ
給電用の抵抗R9 (150 ohm) を取り外してSTM32を停止させました。
以下のピンを配線ハンダ付けして引き出しました。
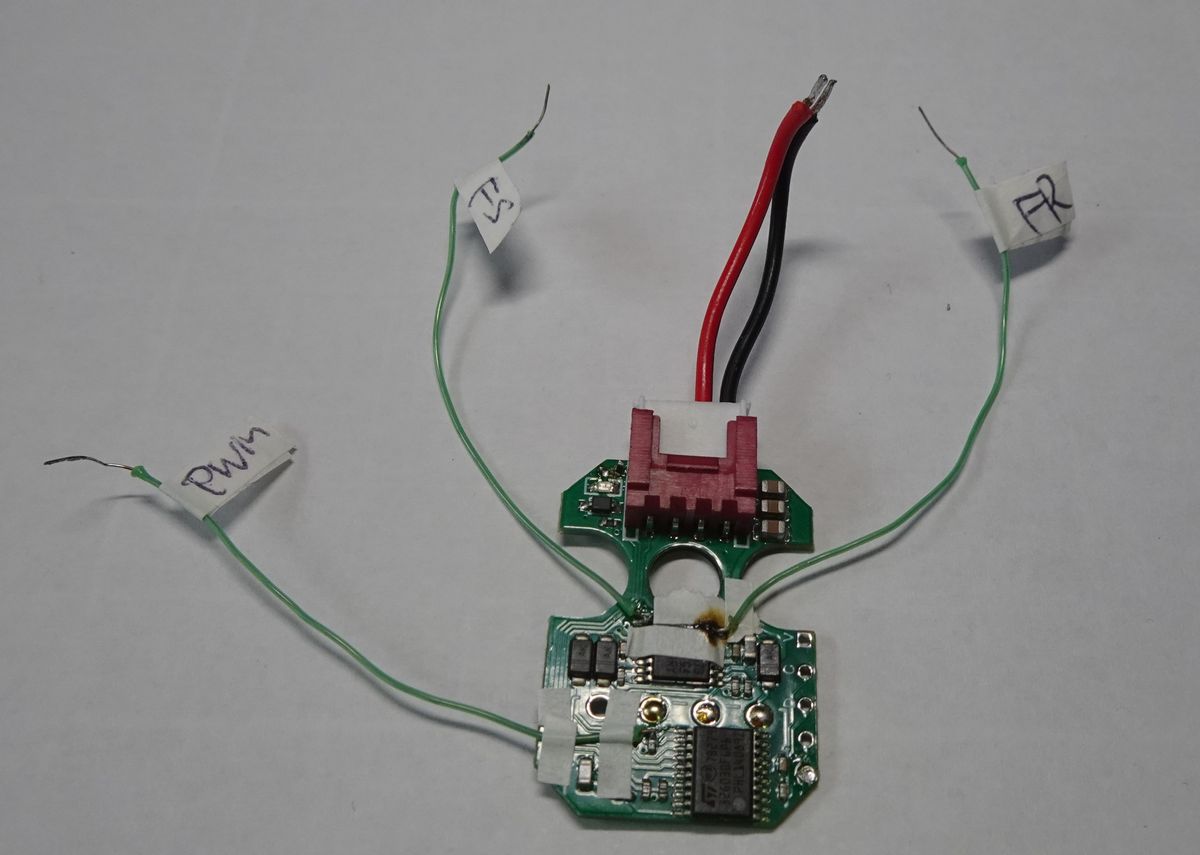
- FS:モータモード選択ピン
- FR:回転方向選択ピン
- PWMIN:回転速度指定ピン

DRV11873 回転動作
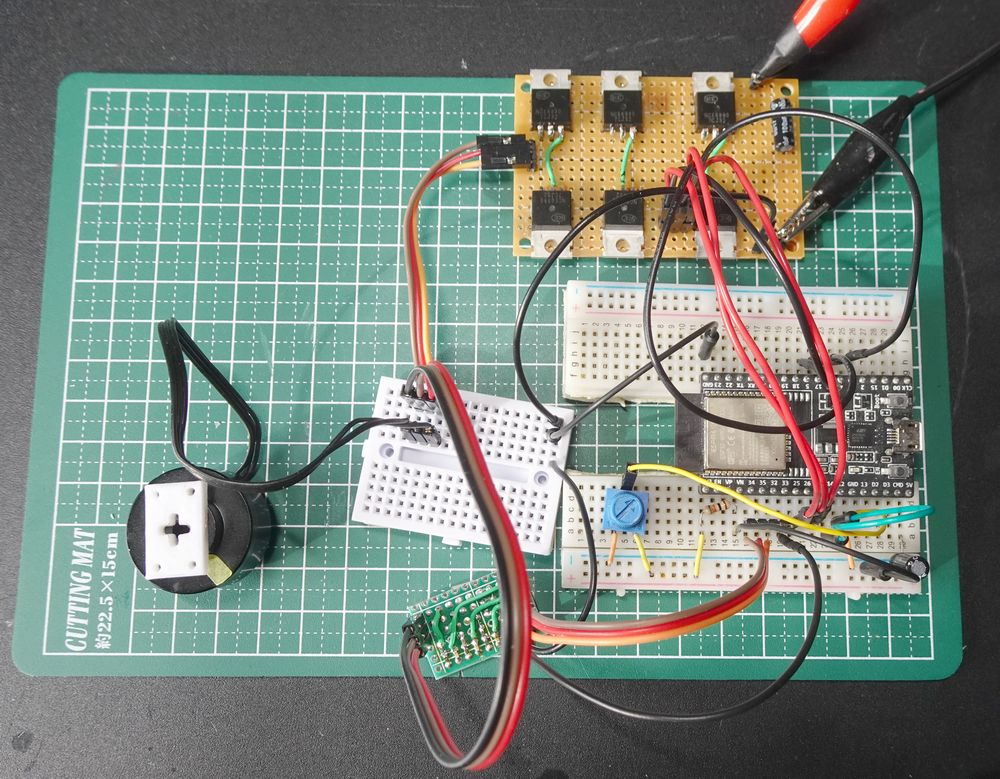
M5StickC Plus2 でPWM信号を生成して回転動作を確認しました。
DRV11873の乗っ取りに成功 pic.twitter.com/BNdTJDdUeP
— HomeMadeGarbage (@H0meMadeGarbage) May 23, 2024
ポテンショメータでPWM信号 (10kHz) のデューティー比を変えれるようにして回転動作を確認。
今回使用したモータではFSピンで設定するハイスピードモードではうまく回転しませんでした。
FSピンをGNDに接続してロースピードモードで動作確認
またICへの共有電源は5Vではうまくこのブラシレスモータを回すことができませんでした。
実験では6V印可しております。
DRV11873の最低動作電圧が5VとのことですのでM5Stack用BLDCモータードライバユニットを4ピンコネクタの5Vで使用するのは結構ギリギリなのではと感じました。
回転方向はFRピンをプルアップ/プルダウンで選択できます。
以下ではM5StickC Plus2のボタンで回転方向を変えてみました。
DRV11873 回転方向制御
しばらくこれでドライバの勉強だな pic.twitter.com/0JMTsktQru— HomeMadeGarbage (@H0meMadeGarbage) May 23, 2024
ロースピードモードではPWMINピンを600 usec 0VにするとFRピンのステートを観て回転方向を変えることができます。
DRV11873はセンサレスでブラシレスモータの3相ラインの中点の電圧を計測して回転を制御しています。
起動時はある程度高速で回して中点で検知できるようになってからPWMによる回転制御が可能になります。
このため低速設定時の起動時や反転時には大きなオーバーシュートが発生しているようにみえます。
おわりに
ここではM5Stack用BLDCモータードライバユニットを分解してドライバIC DRV11873 の動作を楽しみました。
センサレスのため高速応答や高精度の回転は難しいことがドライバICを実際にいじり体験することではっきりと理解することができました。
しかし3相のシステムモータドライバは今回初めていじったので大変勉強になりました。
なにか良いアプリケーションがあればM5Stack用BLDCモータードライバユニットを活用したいと思います。
その際は供給電源の問題が浮き彫りになると思うのでまた考えたいと思います。