
Raspberry Pi
AIロボット犬『XGO-lite2』を ChatGPT で味わう
以前いただいたAIロボット犬 XGO-lite2 のファームが更新されたようなので試してみました。 https://homemadegarbage.com/xgo-03 ChatGPTによるデモ ファーム更新によりChatGPTを用いた3つのデモが追加さ...
Raspberry Pi / 電子工作 2023.10.25 お父ちゃん ![]()

Raspberry Pi Pico W で二足歩行ロボット
以前に Raspberry Pi Pico W を Arduino IDEで開発できるようにして、姿勢制御モジュールを実現しました。 https://homemadegarbage.com/pipicow02 その後に姿勢制御モジュールを応用した二足歩行ロボットを製作しており、ラ...
Raspberry Pi 2023.10.2 お父ちゃん ![]()

AIロボット犬『XGO-lite2』を Python で味わう
前回はブロックプログラミング XGO-Blockly でXGO-lite2 の制御を楽しみました。 https://homemadegarbage.com/xgo-02 ここではPythonでXGO-lite2 を動かしてみたいと思います。 XGO2 は Makuakeク...
Raspberry Pi / 電子工作 2023.7.24 お父ちゃん ![]()

AIロボット犬『XGO-lite2』をプログラミングで味わう
前回はいただいた XGO-lite2 の基本動作を楽しみました。 https://homemadegarbage.com/xgo-01 ここではプログラミングで思いの通りにXGO-lite2 を動かしてみたいと思います。 XGO2 は Makuakeクラウドファンディングにて2023年の...
Raspberry Pi / 電子工作 2023.7.22 お父ちゃん ![]()

AIロボット犬『XGO-lite2』がやってきた
なんと AIロボット犬『XGO-lite2』を提供いただけました! https://twitter.com/H0meMadeGarbage/status/1682208773438406656 XGO2 は Makuakeクラウドファンディングにて2023年の7月21日から9月8日まで予約...
Raspberry Pi / 電子工作 2023.7.21 お父ちゃん ![]()

ラズパイでSTTとTTSを堪能
バケチャンロボとの会話の実現を目指してお母ちゃんが自然会話生成や音声認識、発話の調査をしてくれています。 ChatGPTによる会話文生成 https://homemadegarbage.com/node-red-chatgpt-api OpenAI APIによる音声認識 https://...
Raspberry Pi / 電子工作 2023.6.11 お父ちゃん ![]()

Raspberry Pi Pico W を Arduino IDE で味見2 ー姿勢制御モジュール製作ー
前回は Raspberry Pi Pico W をArduino IDEで味見し、WiFi通信やI2C通信を楽しみました。 https://homemadegarbage.com/pipicow01 ここでは更に深掘りし姿勢制御モジュールも製作しましたので報告いたします。 [amazonjs ...
Raspberry Pi 2023.4.4 お父ちゃん ![]()

Raspberry Pi Pico W を Arduino IDE で味見
やっと憧れのRaspberry Pi Pico W を入手することができました。 これまで Raspberry Pi Pico の開発はC/C++で行っておりましたが、Arduino IDE環境も整っていそうだったので、ここではArduino IDEで楽しんでみました。 [amazonjs ...
Raspberry Pi 2023.3.31 お父ちゃん ![]()
次期モデル Mini Pupper 2 ラズパイCM4で足座標指定
前回はラズパイ CM4で直接サーボ角度を指定してミニぷぱ動作を楽しみました。 https://homemadegarbage.com/minipupper2-08/ ここではラズパイ CM4で足の座標を指定しての動作を楽しみました。 ...
Raspberry Pi / 電子工作 2022.11.23 お父ちゃん ![]()
次期モデル Mini Pupper 2 ラズパイCM4でサーボ角度指定
前回はミニぷぱ2でディスプレイ表示とスピーカによる音声再生を楽しみました。 https://homemadegarbage.com/minipupper2-07/// また前々回はRaspberry Pi Compute Module 4 (CM4) からESP32に...
Raspberry Pi / 電子工作 2022.11.15 お父ちゃん ![]()

次期モデル Mini Pupper 2 ラズパイCM4でメディアを堪能
前回はRaspberry Pi Compute Module 4 (CM4) をミニぷぱ基板に搭載してESP32との連動やAlexa連携を楽しみました。 https://homemadegarbage.com/minipupper2-06/ ここではミニぷぱ2基板上でCM4に接続されたデ...
Raspberry Pi / 電子工作 2022.11.13 お父ちゃん ![]()

次期モデル Mini Pupper 2 に Raspberry Pi Compute Module 4 を搭載
これまでは次期モデル Mini Pupper 2 をESP32のみで楽しんでまいりました。 前回はより製品版に近いとされる基板の動作を確認しました。 https://homemadegarbage.com/minipupper2-05// Mini Pupper 2...
Raspberry Pi / 電子工作 2022.11.12 お父ちゃん ![]()
みんなのラズパイコンテスト2021 優秀賞受賞!
HomeMadeGarbage Advent Calendar 2021 |5日目 今年も みんなのラズパイコンテストに応募しましたよ。 今年はラズパイを使った目新しいものは製作しなかったので応募を見送ろうかと思ったのですが、なんと今年ラズパイ財団より発売されたマイコンのRaspberr...
Advent Calendar / Raspberry Pi / 金魚水槽 2021.12.5 お父ちゃん ![]()
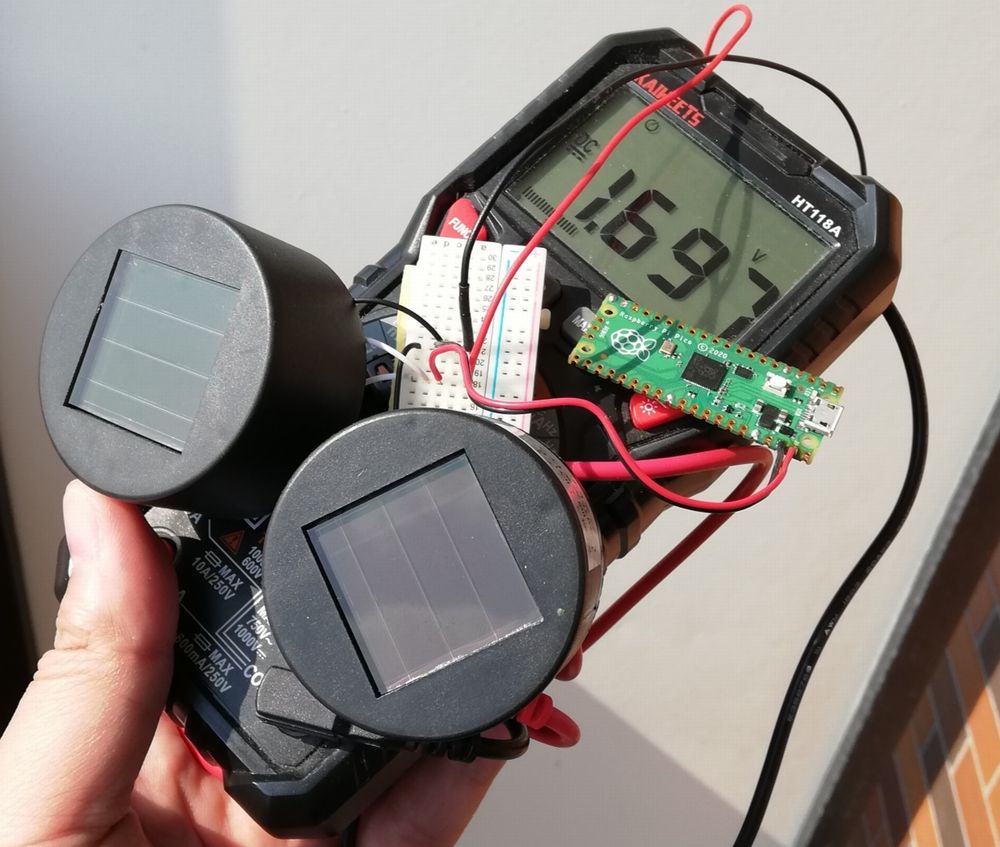
100均のソーラーパネルで Raspberry Pi Pico を駆動
ネットで面白い記事を見つけました。 [bc url="https://fabcross.jp/news/2021/20210414_sensignal_spresenseexpansionboard.html"] Spresense用の拡張ボード発売の記事で ”一旦起動すると2V付近まで電圧が...
Raspberry Pi / ソーラー発電 / 電子工作 2021.4.20 お父ちゃん ![]()

Raspberry Pi Pico バーサライタで PIO を考えるーRaspberry Pi Picoへの道8ー
前回は狭ピッチLEDバーを用いてバーサライタを製作しました。 https://homemadegarbage.com/pipico07 LEDを2本 Raspberry Pi Pico の2つのSPI出力でそれぞれ制御しました。 その際にシングルコアでの制御とデュアルコア制御で...
Raspberry Pi 2021.2.16 お父ちゃん ![]()