SHISEIGYO-1 Walker Jr. ヒザ爆誕
本記事にはアフィリエイト広告が含まれます。
前回は1個のリアクションホイールでバランスする小型の2足歩行ロボット”SHISEIGYO-1 Walker Jr. “の誕生を報告いたしました。
今回は足について更に検討してみましたので報告いたします。
目次
リンク機構
足の検討に際しまして、まずリンク機構について学習しました。
CADソフトFusion360で機構を構成し動作を確認します。
リンク機構
CADで動かせば話がはえーや
理解が進むって#fusion360 pic.twitter.com/r27XpojtTR— HomeMadeGarbage (@H0meMadeGarbage) September 27, 2022
上はオーソドックスな平行四辺形型のリンク機構動作を試したものです。
上辺を水平に固定すれば、縦の辺をどの角度にしても下辺は水平を保っています。
図らずも前回作製した SHISEIGYO-1 Walker Jr. の足はこの機構を使用しており、
長辺2つをサーボで動かしている格好となっております。
足の角度を正弦波形でエレガントに歩行
筐体ゆがみやサーボオフセットは要調整#Robotics pic.twitter.com/D0bu2Fsr61
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2022
ロボット犬 Mini Pupper の足もこの機構の変形版であることが分かります。
平行リンク機構
更に辺を追加した平行リンク機構の動作は以下の通りです。
平行リンク機構
はぁーコレだけで膝出来るのね#fusion360 pic.twitter.com/tuBwTmn5Mv— HomeMadeGarbage (@H0meMadeGarbage) September 27, 2022
上辺を水平に固定すれば、残りの横の辺は水平を保持します。
更にヒザのような機構がうまれ下部の辺の角度も変えることで人間のような足の動作ができております。
差動駆動型リンク機構
平行リンク機構では下腿の角度を変えるにはヒザより下にモータを配置する必要があります。
以下の差動駆動型リンク機構を用いれば、上部にモータを配置することが可能となります。
差動駆動型リンク機構
はぁーこいつはゴキゲンだ
上部にサーボ2つでいけるんだわ。#Fusion360 pic.twitter.com/uSfx70GP28— HomeMadeGarbage (@H0meMadeGarbage) September 27, 2022
差動駆動型リンク機構は上部にモータを2つ配置して、大腿と下腿を制御できる素晴らしい気候であることを学びました。
参考
- 【楽しい構造設計】Fusion360でリンク機構の基本!平行リンクを設計
- ROBO-ONEにチャレンジ! 二足歩行ロボット自作ガイド
平行リンク機構による足
ここでは平行リンク機構を用いでSHISEIGYO-1 Walker Jr.の足を再構築しヒザのある歩行を目指します。
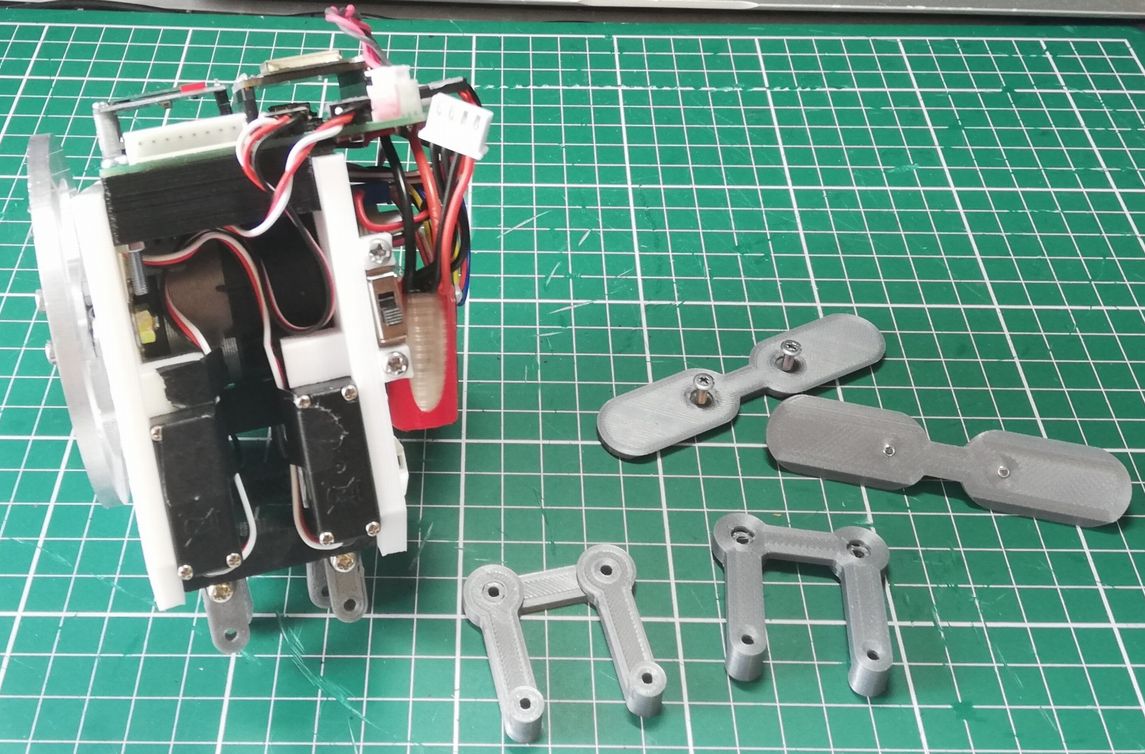
足上部の大体の辺2本をサーボで動かし、下腿は直角固定で動かしてみます。
平行リンク機構の採用でヒザができました!生命感が少し増したようにも感じます。
前回に比べ足が長くなり高くなったのでフライホイールは2枚重ねにしてトルクを向上しています。
しかし下腿は直角で固定しましたので足を後方に下げた際に逆関節になってしまいます。
より生物らしい歩行を目指すのであれば、差動駆動型リンク機構を導入する必要がありそうです。
引き続き検討を進めます。
次の記事