SHISEIGYO-1 Walker Jr. 爆誕
本記事にはアフィリエイト広告が含まれます。
これまでリアクションホイールでバランスする2足歩行ロボットを3体ほど製作してきました。
この度、4台目の製作を実施いたしましたので報告させていただきます。
目次
コンセプト
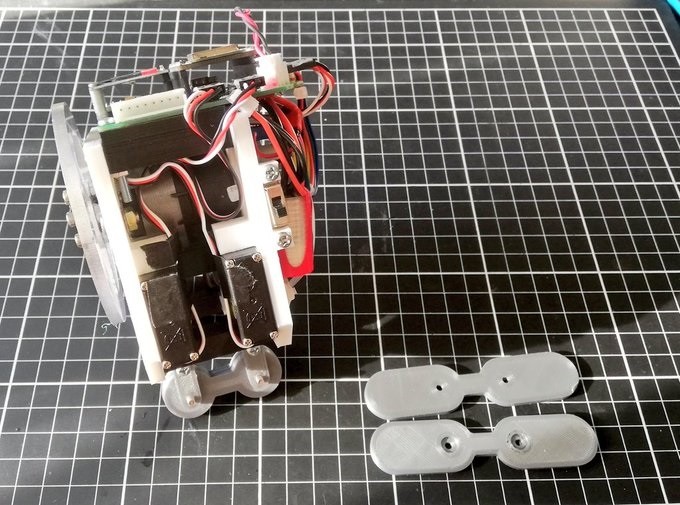
今回は足を小さく構築して、安定度を向上し素早い歩行を目指します。
まーた なんかしようとしてら pic.twitter.com/0z1L1CaSTO
— HomeMadeGarbage (@H0meMadeGarbage) September 23, 2022
足用のサーボモータにはFEETECH のミニサーボを採用しました。

製作
コントローラとIMUセンサはこれまでのSHISEIGYO-1 Walkerと同様にESP32とMPU6050を採用します。
ミニサーボFT1117Mを4個使用して足を構築します。
負けてたまるか pic.twitter.com/jjQqz9fl0d
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2022
倒立動作
3Dプリントした足をサーボアームに固定。片足を2つのサーボを使用して構成します。
取り付けた足での倒立動作を確認いたしました。
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2022
歩行検討
サーボ角度をざっくり指定して歩行を試しました。それなりに歩けています。
2足歩行ロボット pic.twitter.com/nBFhrnWJBX
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2022
歩行の可能性が確認できましたので、足の角度を正弦波形でスムーズに動かしてみます。
若干バランスが悪いですが立派に2足歩行ができています。
足の角度を正弦波形でエレガントに歩行
筐体ゆがみやサーボオフセットは要調整#Robotics pic.twitter.com/D0bu2Fsr61
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2022
更にLiPoバッテリを搭載し、電源コードなしでの動作を実現しました。
SHISEIGYO-1 Walker Jr.
SHISEIGYO-1 Walkerの4号機として ここまで作ってきましたが 仕上がりが思いのほかこじんまりしたので、
セカンドブランド 『SHISEIGYO-1 Walker Jr.』を立ち上げることにしました。
足を小さく作ることができましたので、安定度も高く素早い動作も可能です。
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2022
足再検討
歩行動作の更なる安定を目指して、足の形状を変えてみます。
足幅を長くしました。
断面はエッジを立てています。
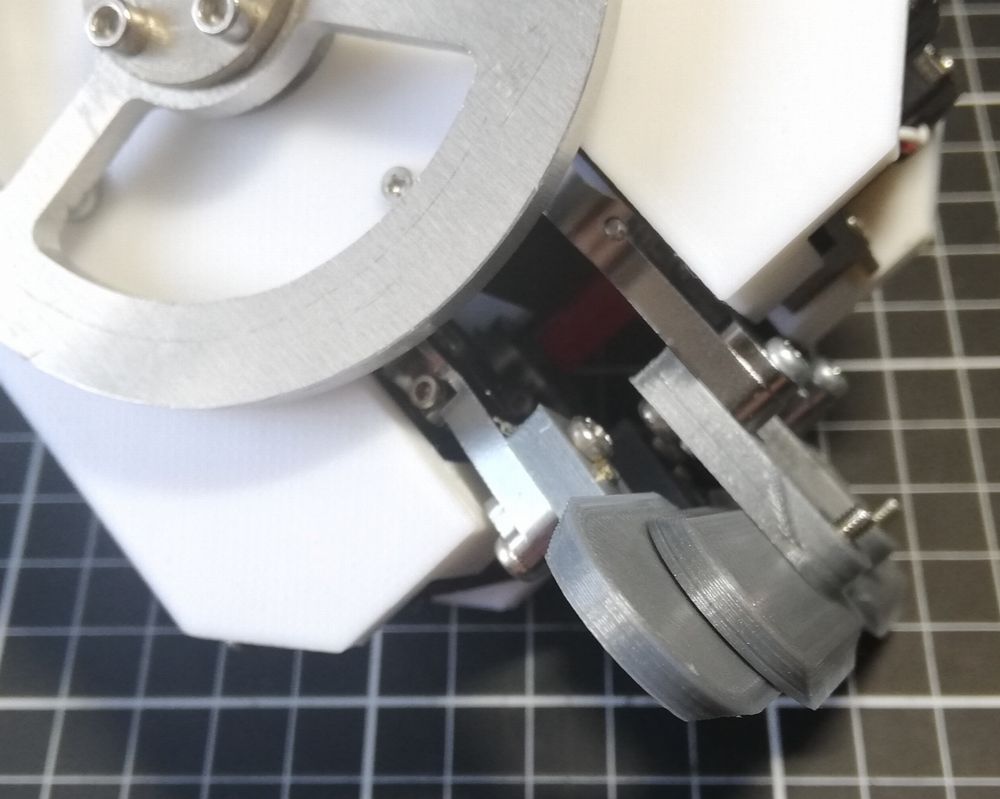
これにより、更に安定度が増し歩幅を大きくとることが可能になりました。
いっけーねー
遅刻 遅刻ー pic.twitter.com/joiaPmuZLj— HomeMadeGarbage (@H0meMadeGarbage) September 26, 2022
おわりに
ここでは新しいコンセプトのSHISEIGYO-1 Walkerの製作に取り組み、
SHISEIGYO-1 Walker Jr.がこの度 誕生いたしました。
これまでのSHISEIGYO-1 Walkerとは異なるフォルムと動作を実現でき大変良かったです。
(仕上がりが想像よりも地味であったため 完成時に少し心が折れたのはナイショ)
次の記事