
SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
前回はシリアルサーボLX-244で2足を構築し、リアクションホイールによる自立動作を確認しました。
ここからはついに歩行に向けて検証進めたいと思います。
目次
足の形状検討
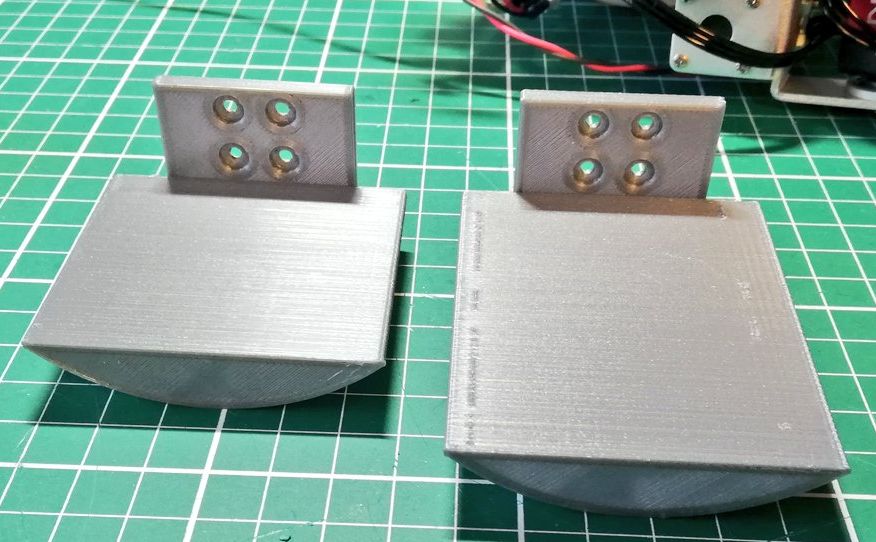
歩行検討の前に更なる安定性向上を目指し、足先の形状を再検討しました。
新しいクック
期待傾けるとくるぶし地面に当たるやり直し!
#Robotics pic.twitter.com/hgp7yUOV8e— HomeMadeGarbage (@H0meMadeGarbage) June 27, 2022
足自体の高さを低くし幅広くして、傾いた際にフレームが接触しないようにしました。
新しいクック
ごつい!
#Robotics #ReactionWheel pic.twitter.com/kpCTrzuYOc— HomeMadeGarbage (@H0meMadeGarbage) June 29, 2022
動作確認
新しい足によって主に高さ低減のために安定性が向上し以下のように、かなり高速に前後の重心移動ができるようになりました!
この時点でシリアルサーボLX-244の精度とトルクには大きな問題はないことを確信いたしました。
歩行検討
遂に歩行にむけて検討を開始します!
まずはBLEを介してコントローラのESP32と通信して、地道に足座標を指定して動作確認します。
歩行の検討開始
手動で制御して動き確認
道のりは険しそう。。。#Robotics #ReactionWheel pic.twitter.com/DDdbn85EGI— HomeMadeGarbage (@H0meMadeGarbage) June 30, 2022
かなり道のりは険しそうです。。
足形状再検討
歩行検討の際に足を交差させるときに接地してる足を下げるとバランスを崩して前方に転ぶので足先を長くすることにしました。
歩行検討
新しい足で歩行動作を検討しました。
足の交差に成功し、一歩踏み出すことができました!!
以下は10倍速動画です。
【10倍速動画】
手動で座標指定して歩行検証
足の交差 成功明日はシーケンス組んで歩かせてみましょう#Robotics #ReactionWheel pic.twitter.com/jEQ2jESroi
— HomeMadeGarbage (@H0meMadeGarbage) June 30, 2022
おわりに
ここでは足の形状の検討を実施して安定性を向上し、足を交差させての一歩を踏み出すことができました。
次は手動によるものではなくシーケンスをプログラムしての歩行を目指します。
なるべく早い周期での歩行を目指したいと考えております。
それではまた。
次の記事
関連記事
 SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
 SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
 SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
 SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
 SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー