SHISEIGYO-1 Walker 参 を実現させたい俺6 ーバッテリ内蔵ー
前回はSHISEIGYO-1 Walker 参 の歩行動作の実現を確認できました。
SHISEIGYO-1 Walker 参はリアクションホイールでバランスをとり、格安シリアルサーボLX-244で構成された足で歩行します。
目次
バッテリ内蔵
高トルクのシリアルサーボLX-244で足を構成しましたので、念願だったバッテリ搭載を実施しました。
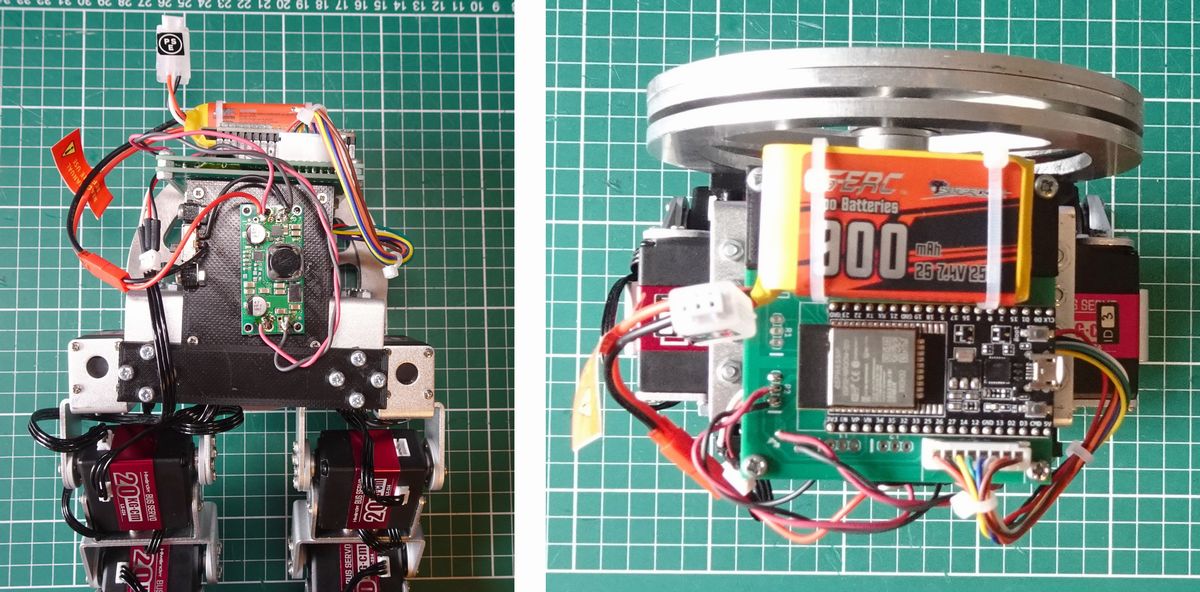
構成
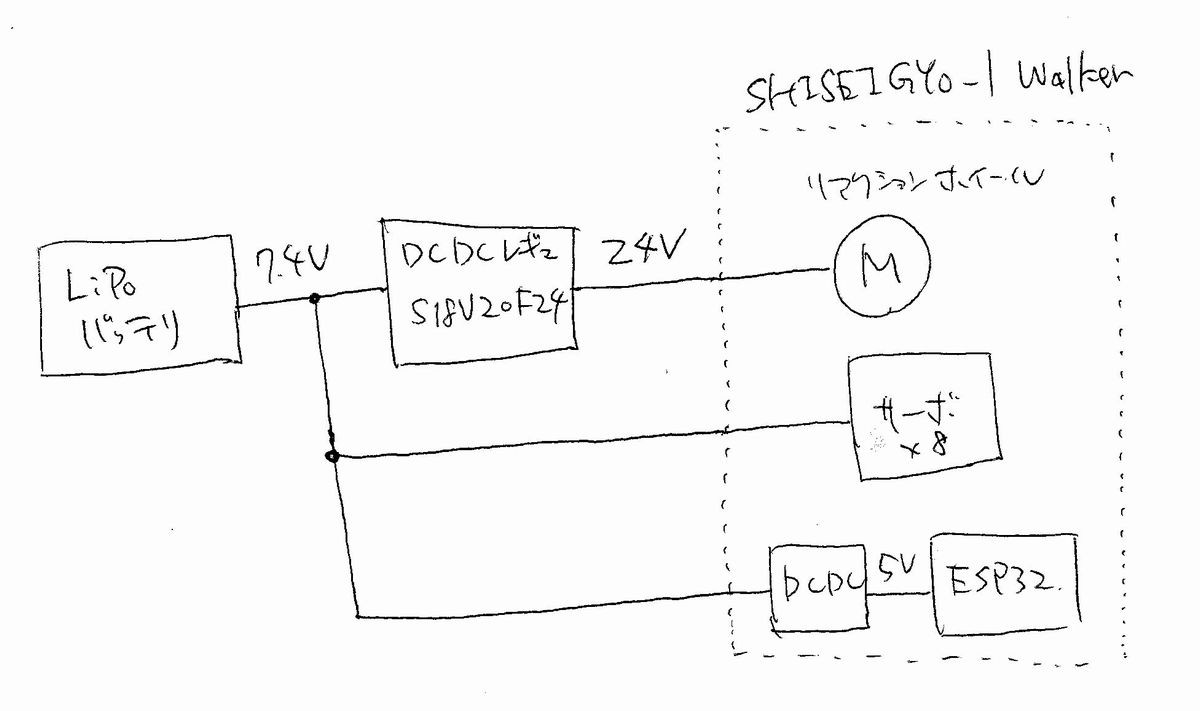
部品
- LiPoバッテリ
- 昇降圧DCDCレギュレータ

動作
無事にバッテリ搭載できました。
電源コードなくなって快適♪
煩わしかった電源線がなくなって凄くご機嫌♪
俺も嬉しい(*´ω`*)#2足歩行ロボット #ReactionWheel #Robotics pic.twitter.com/QKX1UKAGIB— HomeMadeGarbage (@H0meMadeGarbage) September 11, 2022
歩行
バッテリ内蔵でコードレス化に成功したのでどこまでも歩けるはずですが、
なかなかスピード出せず安定性含めて調整が必要です。
もっとサクサク歩けるようにして一緒に散歩行きたいな。
次の記事
関連記事
 SHISEIGYO-1 Walker 参 を実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walker 参 を実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
 SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
 SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
 SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
 SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー