Adafruit
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
前回は 1軸 姿勢制御モジュール SHISEIGYO-1のホイールにLEDをつけてバーサライタ動作させてみました。 https://homemadegarbage.com/reactionwheel50 姿勢制御モジュールのホイールはバランス状況によって正転・逆転及び...

ロボット犬『Mini Pupperミニぷぱ』で 書道
これまでミニぷパに色々な動作や機能を実装し楽しんでまいりましたが、 ついに字を書けるようになりました! 動作 早速 凛々しい書道スタイルをご覧ください。 ロボット犬が文字を書く pic.twitter.com/0UGeUNsNR1 — HomeMadeGarba...
電子工作 2022.2.28 お父ちゃん ![]()

姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御モジュールのホイールにLEDを付けてバーサライタにしてみてはどうだろう。 思いついてしまったので どうなるかは考えずに作り上げることだけを考えて手を動かした。 ちょうど祝日 天皇誕生日。俺なりの祝いの儀式だ。 とにかく作る 1軸 姿勢制御モジュール SH...
電子工作 2022.2.24 お父ちゃん ![]()

ロボット犬『Mini Pupperミニぷぱ』を AIカメラ HuskyLens で堪能
前回は9軸 IMUセンサ BNO055を用いてミニぷぱ制御を楽しみました。 https://homemadegarbage.com/minipupper11/ ここでは更に AIカメラ HuskyLensを追加して ミニぷぱを賢くしちゃいます。 AIカメラ ...
電子工作 2022.2.20 お父ちゃん ![]()
ロボット犬『Mini Pupperミニぷぱ』を BNO055で姿勢制御
前回まではラズパイ4でミニぷぱを楽しみました。 https://homemadegarbage.com/minipupper10/ ここではまたマイコンによる制御に立ち戻って新たなIMUセンサを楽しみます。 BNO055 以前はコントロールにATOM Matri...
電子工作 2022.2.19 お父ちゃん ![]()

立体 バーサライタ – 3D POV Display –
これまで私は様々なバーサライタ(POV ディスプレイ)を製作してきました。 そうした中で何となく平面のバーサライタを立体的に積み上げて立体表示できるのではと考えておりました。 なんかめんどくさそうだし、費用もかかるだろうと思考実験の枠組みから出ないまま時は過ぎたのですが この度良い機会に恵まれ...
電子工作 2021.2.14 お父ちゃん ![]()
2軸 姿勢制御モジュール SHISEIGYO-2 爆誕 ーリアクションホイールへの道27ー
前回はAdafruit CLUE を用いて1軸 姿勢制御モジュール SHISEIGYO-1 を製作しました。 https://homemadegarbage.com/reactionwheel26 ここでは2軸 姿勢制御モジュール SHISEIGYO-2 を製作しましたので報告いたします。 &...
電子工作 2020.12.20 お父ちゃん ![]()
Adafruit CLUE で SHISEIGYO-1 やってみた ーリアクションホイールへの道26ー
これまでは3軸 姿勢制御モジュール SHISEIGYO-3の製作に勤しんでおりましたが、注文中のモータが到着するまで一旦お休みとします。 https://homemadegarbage.com/reactionwheel25#%E3%83%90%E3%83%B3%E3%83%89%E3%83%96...
Advent Calendar / 電子工作 2020.12.20 お父ちゃん ![]()
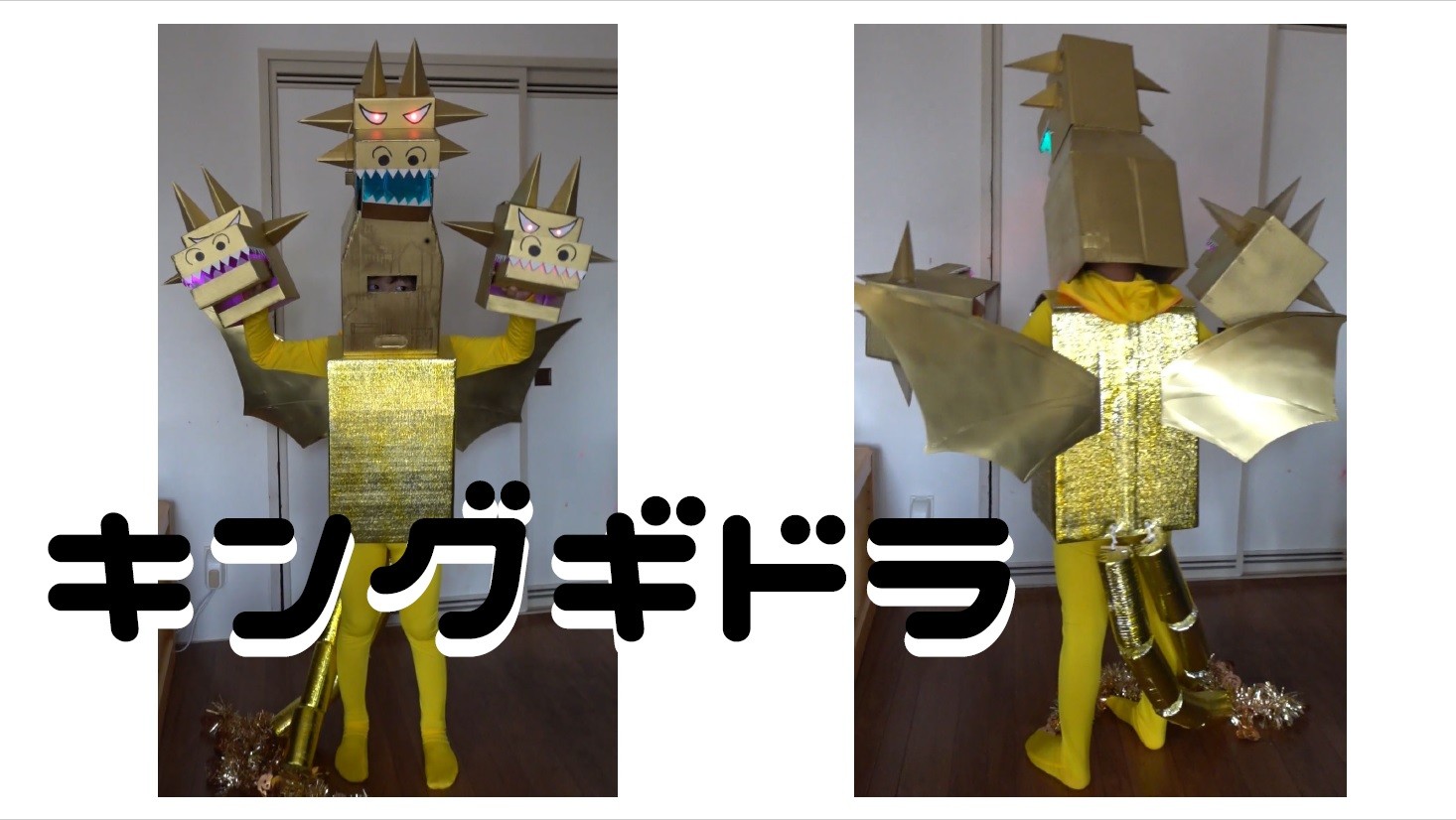
ダンボール キングギドラ コスプレ衣装の製作
去年はゴジラのコスプレでハロウィンパレードに参加して楽しんだ長男くん https://homemadegarbage.com/godzilla/ 今年も半年以上前からハロウィンに どんな格好するかをいつも考えていたのですが。。。 残念ながら今年はハロウィンイベントが中止。。。 それでもずーっ...

CircuitPython PewPew M4 を使ってみた
Makerfabs 様よりCircuitPython PewPew M4 をいただきましたので使用してみました。 [bc url="https://www.makerfabs.com/circuitpython-pewpew-m4.html"] PewPew M4 ...
電子工作 2020.7.21 お父ちゃん ![]()

Bleedin’ earring
Twitterにて面白い作品を見つけました。 Wasn’t sure if this idea was gonna work, had to build the whole thing first. It’s OK! Gonna paint the LED strips next to bet...
電子工作 2020.3.11 お父ちゃん ![]()
オリジナルプロッタ eddyWrite の分解能を向上
前回 製作したオリジナルのプロッタ eddyWrite (エディライト) の分解能の向上を実現しましたので報告させてください。 https://homemadegarbage.com/eddywrite01 スクリュー 前回は半径方向の分解能が16、回転1周の分...
電子工作 2020.2.27 お父ちゃん ![]()
クルクルプロッタを自作 eddyWrite (エディライト)
クルクル回りながら描画するオリジナルプロッタを製作しました。 名付けて "eddyWrite" (エディライト)!!! 早速動きをみてください。 edyWrite(エディライト) 爆誕#スマイリーイラスト pic.twitter.com/9bYRe78mxg — HomeMadeG...
電子工作 2020.2.23 お父ちゃん ![]()
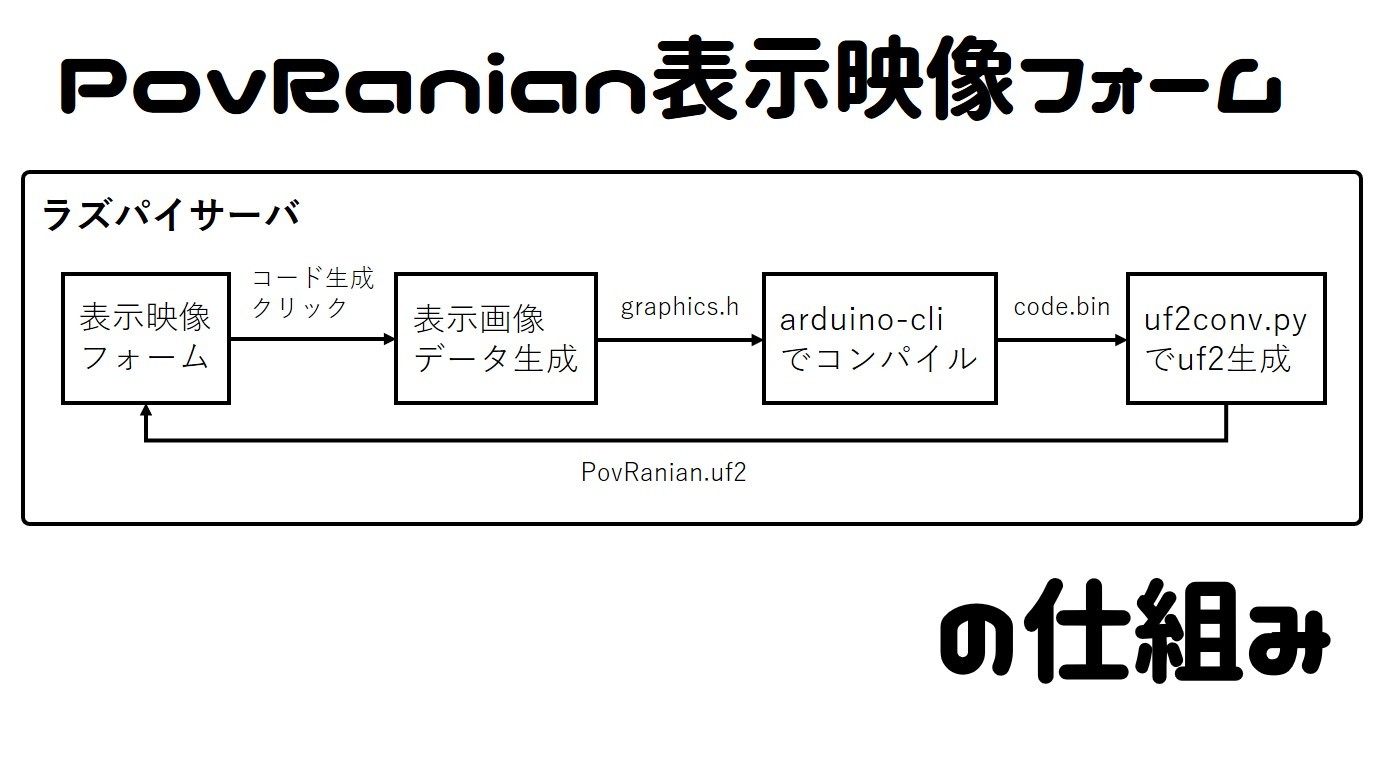
ハンディバーサライタ PovRanianの表示映像生成フォームの仕組み
Arduino Advent Calendar 2019 | 22日目 今年は念願のHomeMadeGarbageのオフィシャルショップを開店することができ、ハンディバーサライタPovRanian (ポブラニアン)を出品いたしました。 画像や図形をフルカラーで表示することができます。 ハン...
Advent Calendar / 電子工作 2019.12.22 お父ちゃん ![]()
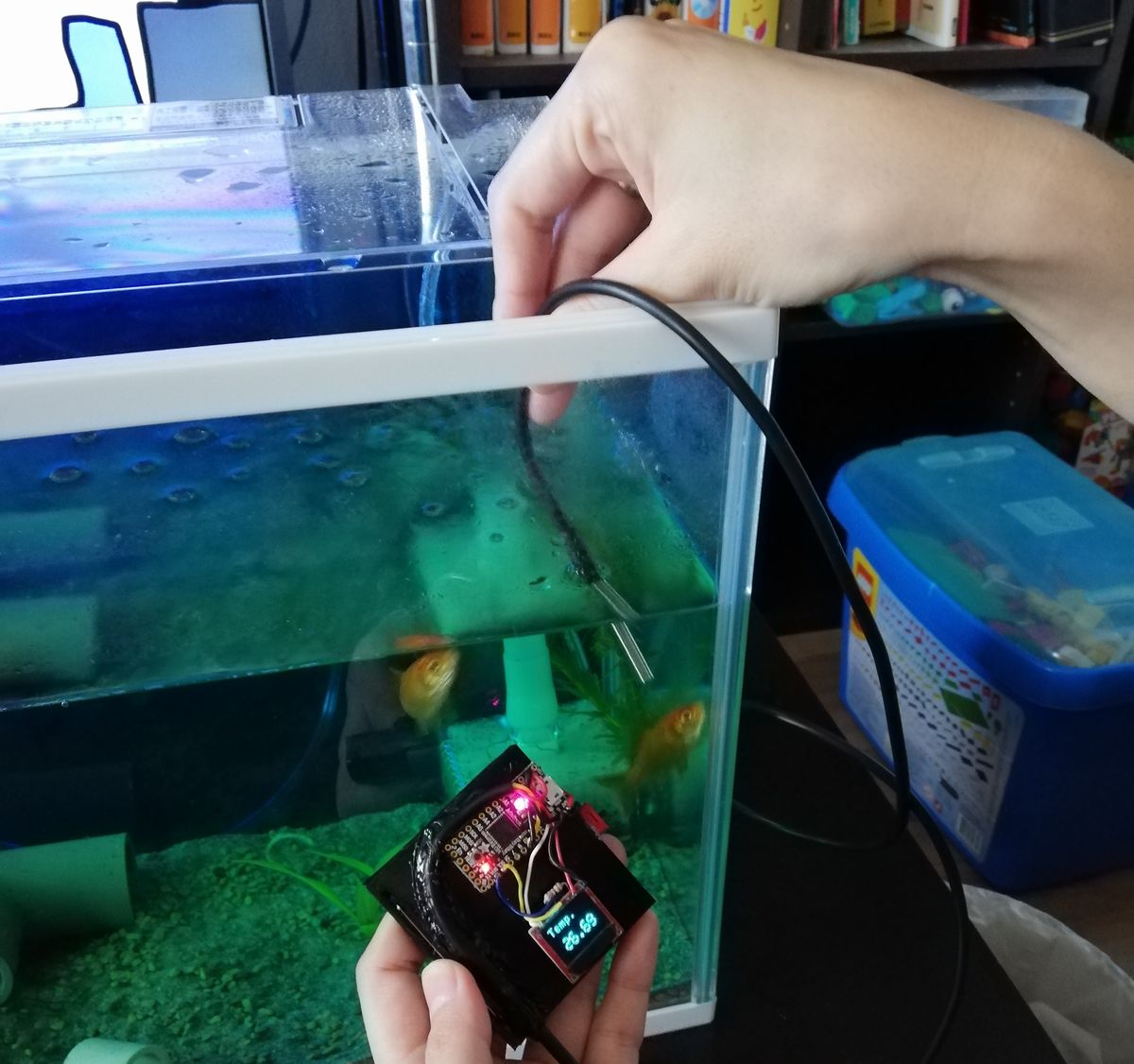
温度センサ で 水温計 作製
我が家の金魚水槽の水温を管理したいとお母ちゃんがいうので、センサを購入しました。 [amazonjs asin="B07M886SBK" locale="JP" title="3個 セット ArduinoセンサーDS18B20のための防水デジタルサーマルプローブまたはセンサーラボ温度測定材料 (3...
