
Blynk
歩行検討2 -シリアルサーボと距離を詰めたい俺7-
前回からシリアルサーボ (KRS3301)を用いて製作した足ロボットの歩行の検討を始めました。 https://homemadegarbage.com/krs06/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3...
電子工作 2022.1.13 お父ちゃん ![]()
タムラトウサクさん
HomeMadeGarbage Advent Calendar 2021 |9日目 エンジニアや研究者は使用技術や着想の引用元を明確にするべきである という教育を受けた 教育はされたが守るとは言っていない やりたいからやった むしゃくしゃしてやった ...
Advent Calendar / 電子工作 2021.12.9 お父ちゃん ![]()

特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
HomeMadeGarbage Advent Calendar 2021 |7日目 以前製作した球体ホイールによるバランスロボットを改良いたしましたので報告いたします。 https://homemadegarbage.com/reactionwheel41 SHISEI...
Advent Calendar / 電子工作 2021.12.7 お父ちゃん ![]()
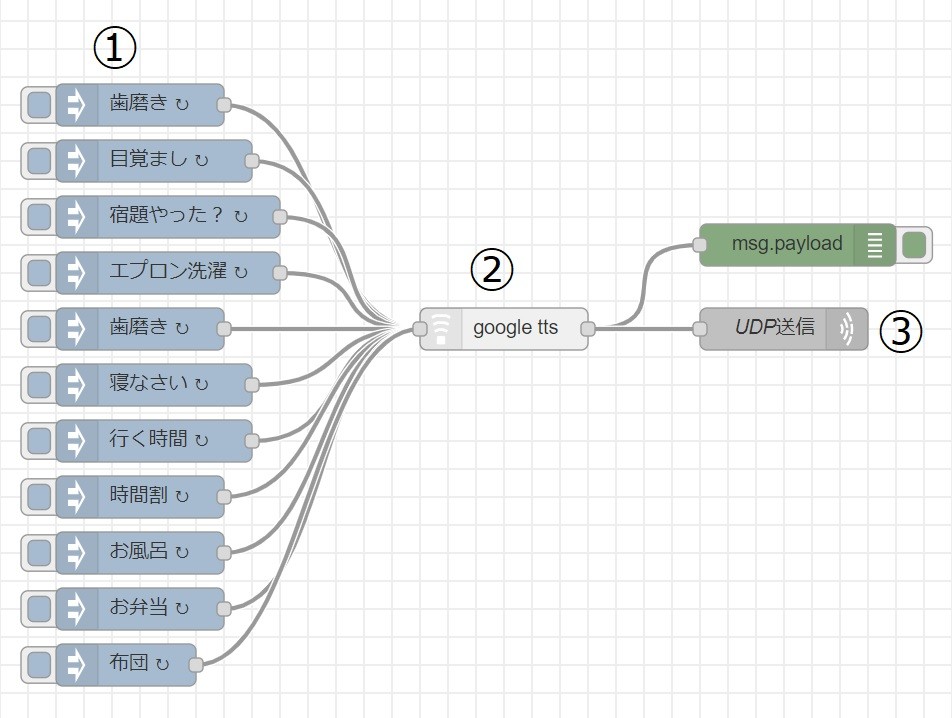
ATOM Echo のための定時発話システム構築 -Node-RED の利用-
前回はATOM Echo を用いてTTSのストリーミング再生を堪能させていただきました。 https://homemadegarbage.com/atomecho02 ここでは、日々の生活のなかで目覚ましなどの定時発話を目指しシステム構築いたしました。 システム概...
IoT 2020.6.21 お父ちゃん ![]()

M5StickC 8Servos Hat でラジコンを堪能
8個のサーボモータを制御できるM5StickC用拡張ボードを購入しました。 [bc url="https://www.switch-science.com/catalog/6209/"] 非常に低価格のうえ使いやすかったです。 ここではM5StickC 8Servos Hatを使用してラジコン...
電子工作 2020.4.29 お父ちゃん ![]()

M5StickCは創造の触媒である
M5Stack Advent Calendar 2019| 13日目 言わずと知れたM5StickCを購入させていただき、多くの刺激とクリエイティビティーをこの製品から得ることができました。 [amazonjs asin="B07R1QDVWF" locale="JP" title="2019 ...
Advent Calendar / 電子工作 2019.12.13 お父ちゃん ![]()

2019年 Arduino IDEを用いて製作したもの
Arduino Advent Calendar 2019 | 2日目 もう12月。早すぎやしないか? 今年も色々工作を楽しんできましたが、Arduino IDEを使用して制作したものを振り返ってみたいと思います。 この振り返りが次へのモーティブ増進や脳内検閲の緩和に繋がることを期待して。 &...
Advent Calendar / 電子工作 2019.12.2 お父ちゃん 
M5StickC でスマートな電池を作製 M5Stick-Cell
ついに購入しました!M5StickCを。 M5StickCは大人気のM5Stackの小型版です。M5Stackは持っていなかったのですがM5StickCのカワイイ色やサイズそして何と言っても2千円以下の家計に優しい価格にやられて速攻購入した次第です。 ここではM5StickCを用いて製作した実に...
ESP32 でバーサライタ作製
以前つくったPOV(Persistent Of Vision=残像)表示装置バーサライタのマイコンをESP32にしてみました。高速で優秀なESP32で更に無線も使えるので、表示画像をBluetoothで切り替えなども試してみました。 https://homemadegarbage.com/evil...

電子ペーパーと Blynk でリモートメモ帳
先日DFRobot様より提供いただいた電子ペーパーモジュールで Blynkでユビキタス(いまでも使われているのこの言葉?)に書き込めるメモ帳をこしらえてみました。動作は一番下に動画リンクしていますー 構成 電子ペーパーモジュールをFirebeetle ESP32に載せてスマホアプリBlynkでテ...
IoT 2019.1.1 お父ちゃん
Blynk 新ウィジェット Image Gallery
いつのまにやらBlynkに新たなウィジェットが追加されておりました! Image Galleryといって、なにやら画像をコントロールできるとのことで早速試してみました。 🎉 New #Blynk build has arrived Blynk is rolling out a new ve...
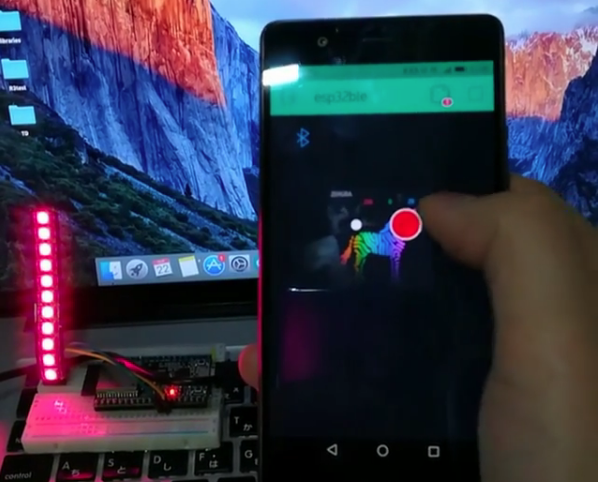
ついに Blynk が ESP32 のBLEに対応
Blynkアプリにバージョンアップ(v0.5.0)があり、まだβ対応ですがESP32とのBLE通信ができるようになりました。 WiFi通信は以前確認しておりまして、BLEも自由自在につかえたらなぁ。。などと思っていたのでまさに待望のソレでした♪ https://homemadegarbage...
電子工作 2017.12.22 お父ちゃん

Raspberry Pi Zero W 単体でラジコンカー自作
前回Raspberry Pi Zero Wでサーボモータを制御してみてラズパイでなにかしらを制御するのはシンドいなぁという感想を得たのですが。。。デジタル信号制御なら問題ないだろということで、I2C入力のモータドライバでラジコン作りました。 https://homemadegarbage.com/...
Raspberry Pi / 電子工作 2017.9.23 お父ちゃん
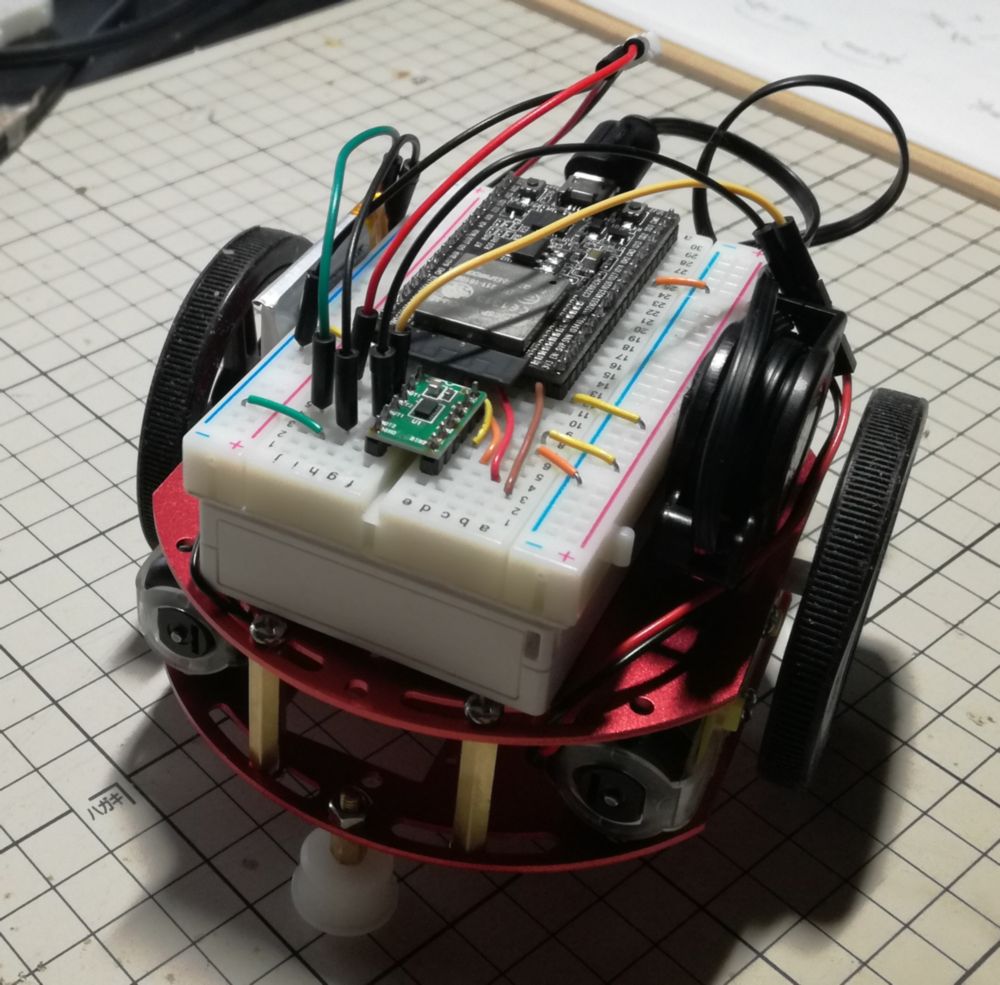
ESP32 と Blynk と 円形ロボットシャーシキット と
かわいい円形ロボットシャーシキットをAdafruitで購入したので、ESP32載っけて Blynk でWiFiラジコンつくりました♪ 構成 部品 BLE、WiFi内蔵マイコンボード ESP32-DevKitC [amazonjs asin="B06XWP81GP" locale...
電子工作 2017.9.17 お父ちゃん