
M5stack
ロボット犬つくってバク転させてみた
前々からやってみたいと思っていたロボット犬のバク転を実現するべく頑張りましたので報告します。 これやってみたいよなー ミニぷぱでも試したことあるけど、サーボのトルクや足の構造上で無理でした。 https://twitter.com/H0meMadeGarbage/statu...
電子工作 2023.10.20 お父ちゃん ![]()
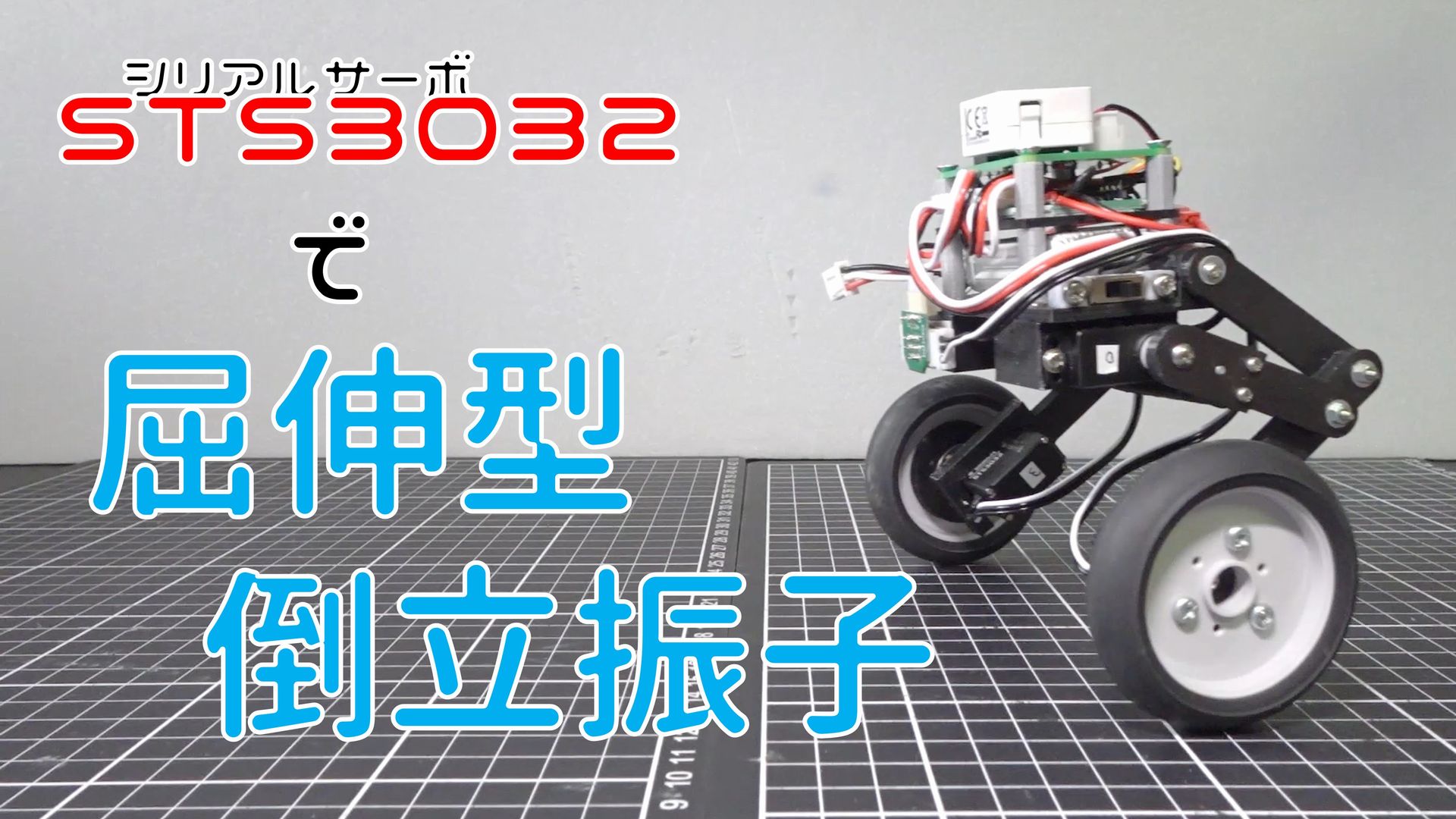
シリアルサーボ STS3032 で屈伸型倒立振子
前回はホイール駆動用にギアドモータを採用した屈伸型倒立振子を製作しました。 https://homemadegarbage.com/bala20/ ギアドモータの応答性に若干もたつきがあり縦横無尽に操作とはいきませんでした。 エンコーダなどを追加して回転速度をガッチリセンスすれ...

Wheel-Legged Robot ホイレグくん
ここ最近は倒立振子製作に力を入れておりました。 https://homemadegarbage.com/bala18// https://twitter.com/H0meMadeGarbage/status/1693568479520260488 こちらの屈伸型倒立振子を製作した際に、いつか4...
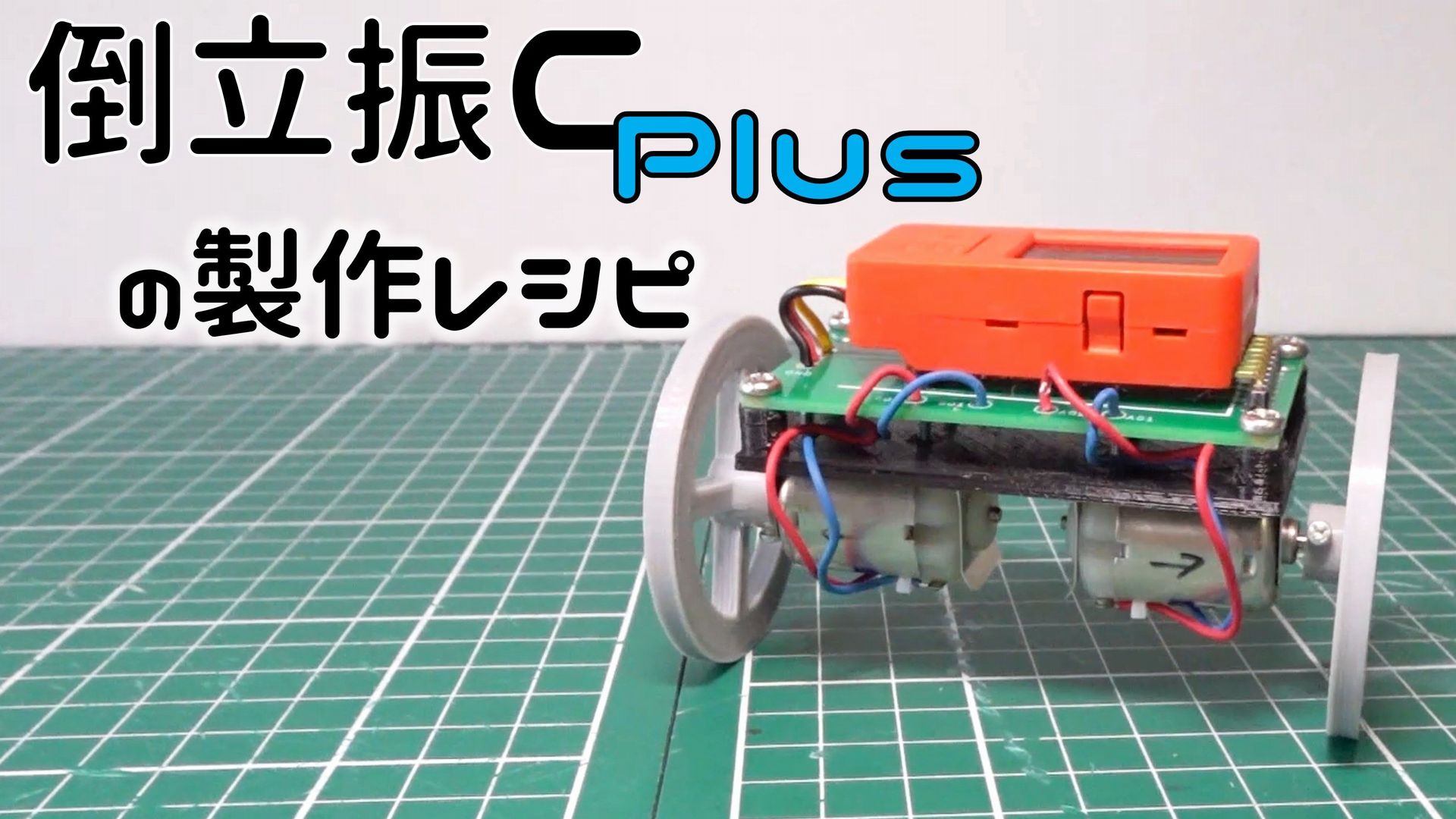
倒立振C Plus の製作レシピ販売開始
DCモータを用いた手軽で楽しい倒立振子の製作レシピの販売を開始しました。 何卒宜しくお願い致します。 https://shop.homemadegarbage.com/product/pendulumc-plus_recipe/ レシピ製作の流れ DC...
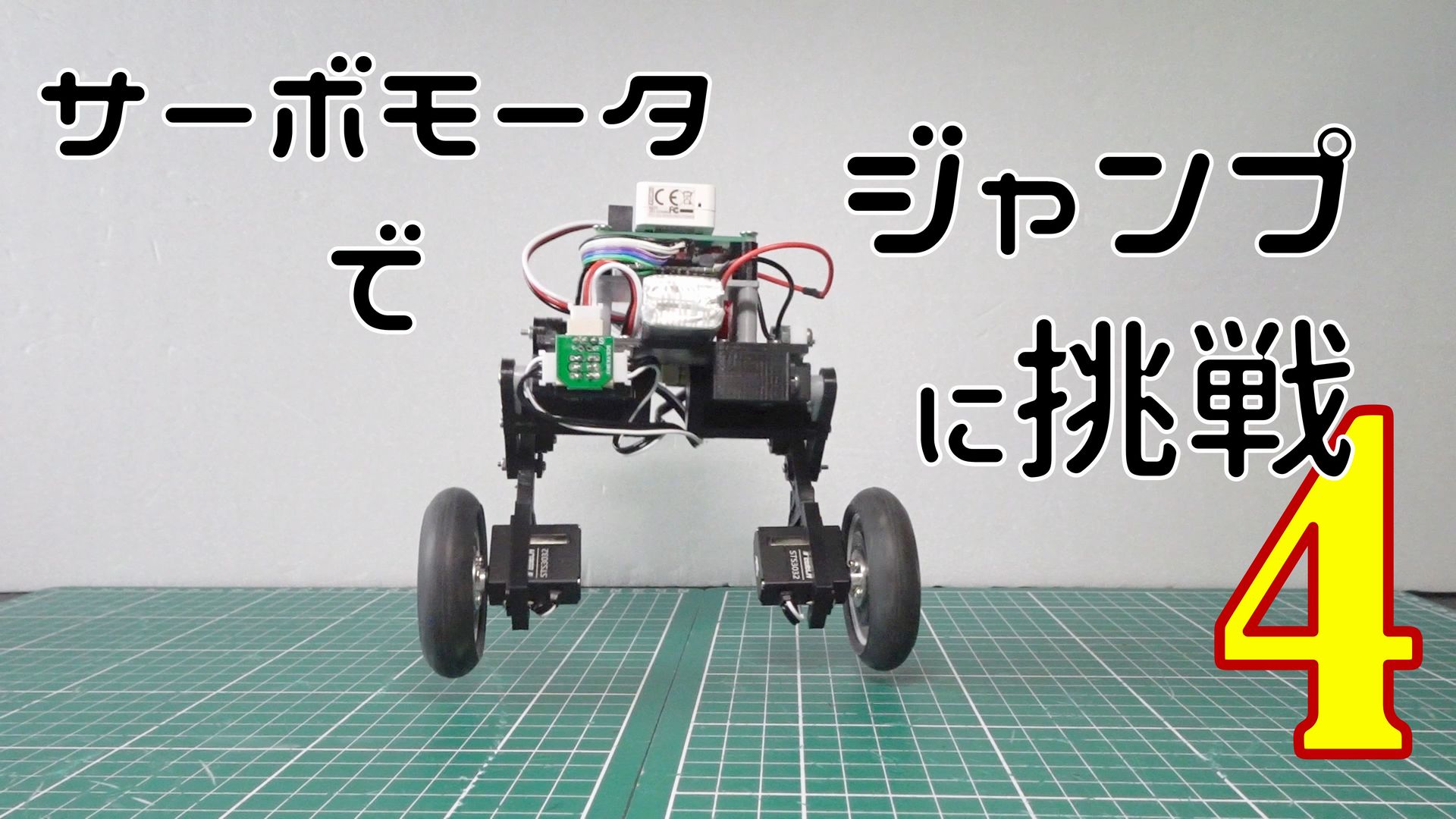
サーボモータでジャンプに挑戦4
前回はシリアルサーボ STS3032を用いての屈伸倒立振子を製作し、ジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala17// しかし残念ながらジャンプ後の着地は実現できませんでした。 ホイール用モータ 倒立振子の...

サーボモータでジャンプに挑戦3
以前、シリアルサーボ STS3032 で構成した足によるジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala15// ここで、屈伸型の倒立振子でジャンプする際にはホイール用のモータの軽量化も必要そうであることがわかりました。 前回は軽量のギアドモー...
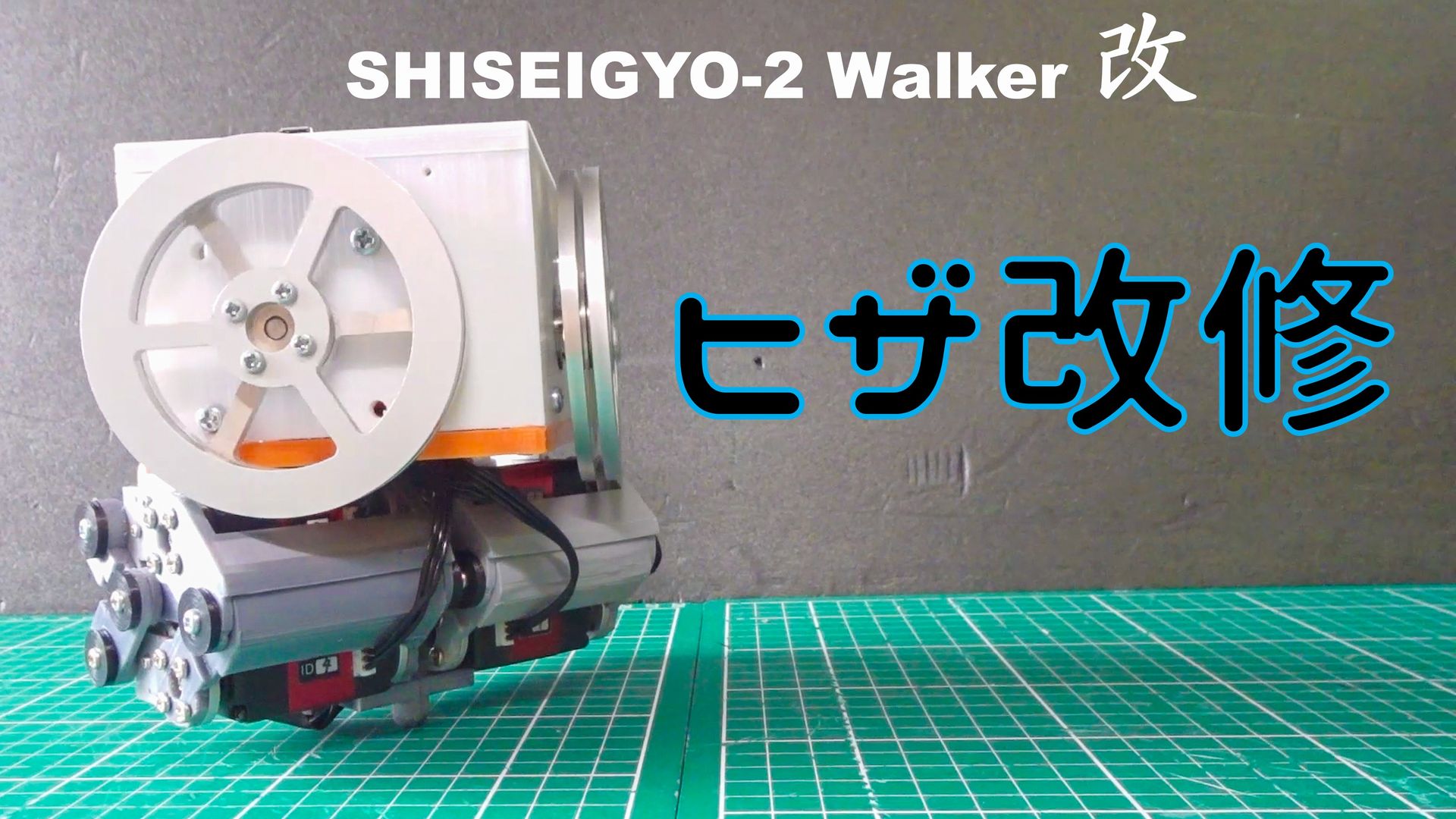
二足歩行ロボット SHISEIGYO-2 Walker 改 のヒザ改修
以前製作した二足歩行ロボット SHISEIGYO-2 Walker 改 ですが、 https://homemadegarbage.com/walker05// 関節がイジっているうちにグニャグニャになり うまく歩けなくなってしまいました。 https://twitter.com/H0me...
電子工作 2023.8.8 お父ちゃん ![]()

SHISEIGYO-1 DC Plus レシピ配布開始 ーリアクションホイールへの道60ー
前回は1軸姿勢制御モジュールの入門的モデルの検討を行いました。 https://homemadegarbage.com/reactionwheel59 SHISEIGYO-1 DC NEO とSHISEIGYO-1 DC Plus の2機種が生まれました。 基板作...
電子工作 2023.7.13 お父ちゃん ![]()
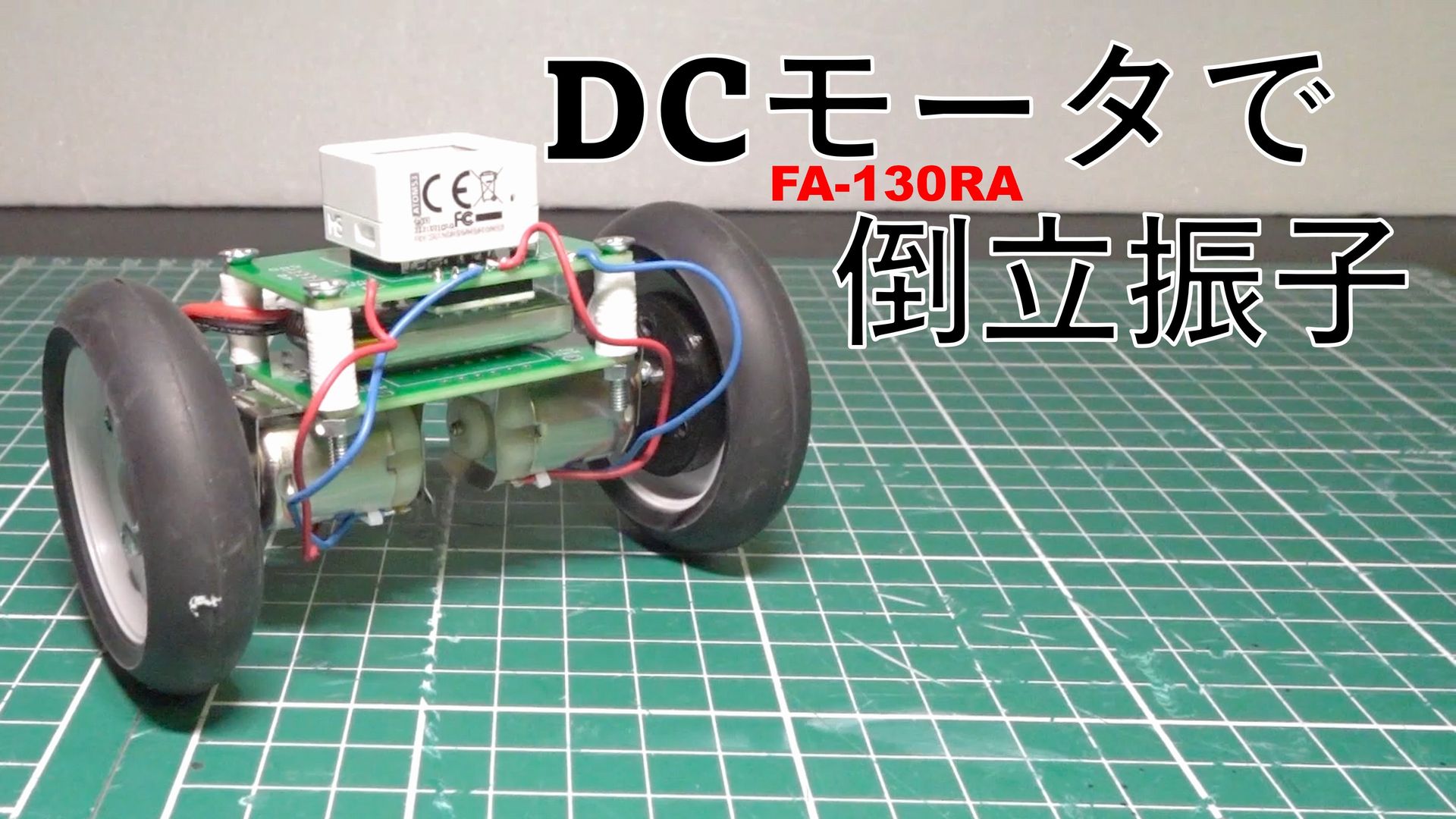
DCモータ FA-130RA で倒立振子作製
前回はDCモータRE-280RA を用いて、屈伸型 倒立振子を製作しました。 https://homemadegarbage.com/bala11/ ここでは更に馴染みの深いモータを用いての倒立振子を検討しました。 マブチモーター FA-130RA 以前製作した...

DCモータ 倒立振子で屈伸
前回はDCモータ RE-280RA を用いて倒立振子を製作しました。 https://homemadegarbage.com/bala10// [amazonjs asin="B07F83J78X" locale="JP" title="モーター RE-280RA"] ここでは膝を設けて屈伸動...
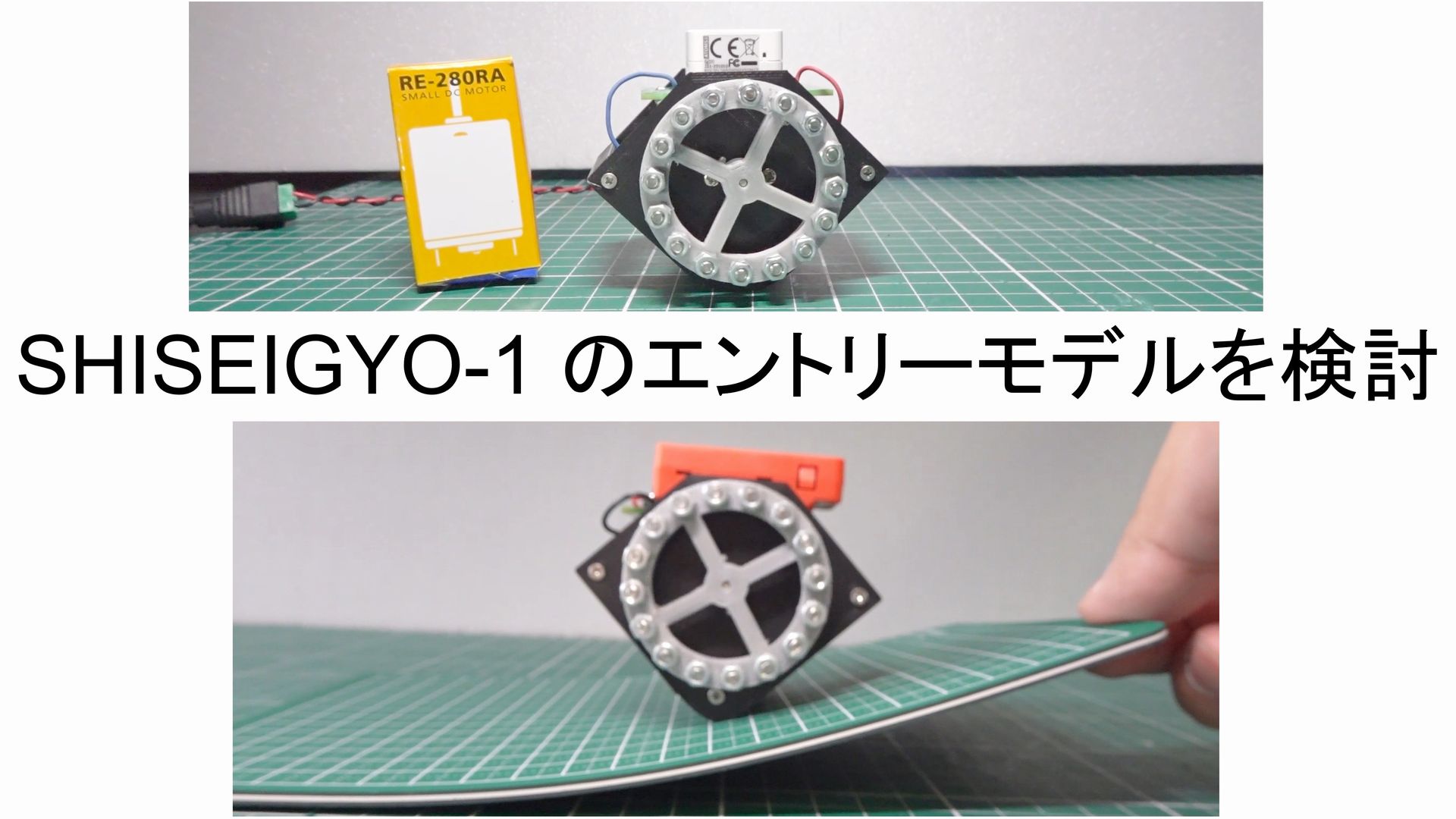
SHISEIGYO-1 のエントリーモデルを検討 ーリアクションホイールへの道59ー
これまで様々な姿勢制御モジュール SHISEIGYO を展開してまいりました。 機種が増えて機能もニッチで細分化しすぎている感もございます。 ここらで誰もがわかりやすくかつ入手性の良い分品で構成された入門的なSHISEIGYOのエントリーモデルが欲しいなと考えました。 ...
電子工作 2023.6.29 お父ちゃん ![]()
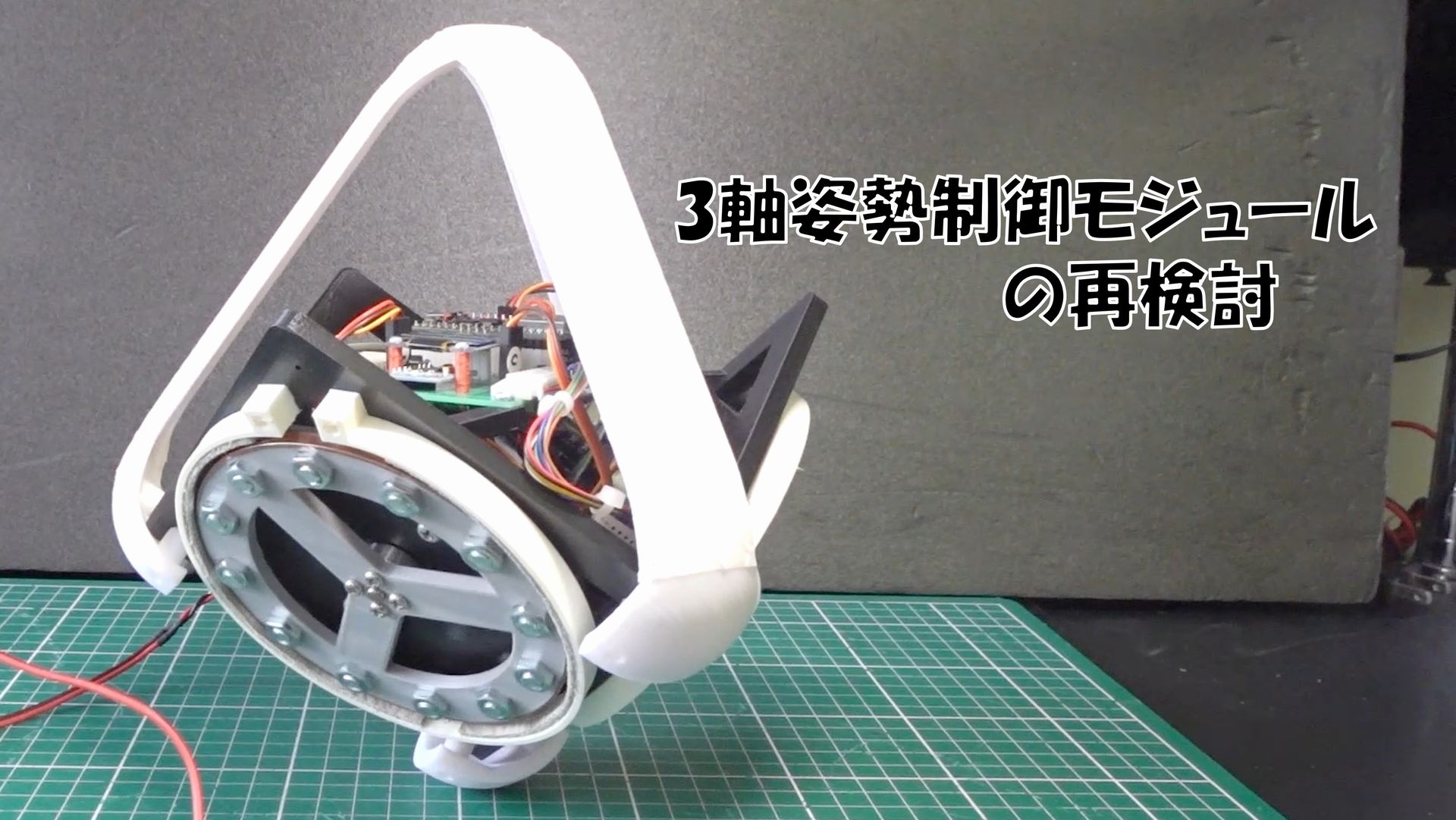
3軸姿勢制御モジュールの再検討 ーリアクションホイールへの道58ー
久しぶりに3軸姿勢制御モジュール (SHISEIGYO-3) の検討を実施しましたので報告いたします。 https://shop.homemadegarbage.com/product/shiseigyo-3-cube/ IMUセンサ位置変更 これまでのSHISE...
電子工作 2023.6.18 お父ちゃん ![]()
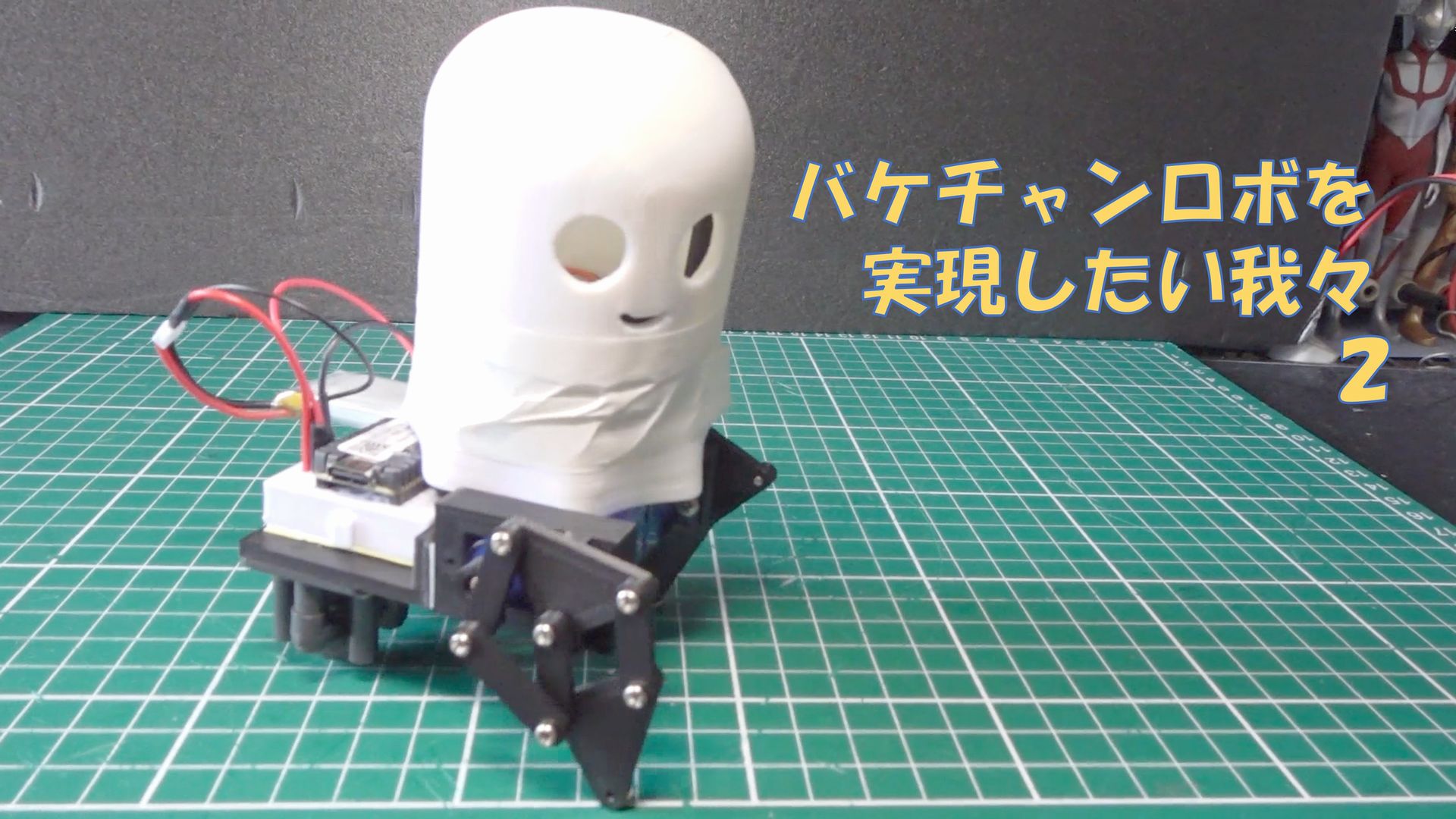
バケチャンロボを実現したい我々2
前回はお母ちゃんが発案した"バケチャンロボ"の実現を目指して、ボディや目の表示の検討を実施しました。 https://homemadegarbage.com/bakerobo01/ 更に検討を進めましたので報告いたします。 電子ペーパーディスプレイ...
電子工作 2023.5.2 お父ちゃん ![]()

シリアルサーボモータ SCS0009 で倒立振子 完結編
前回はサーボモータSCS0009を用いて屈伸動作する倒立振子の検討を実施しました。 https://homemadegarbage.com/bala07 ここでは前回でた課題の検討を進め サーボモータを用いた倒立振子の神髄に迫りたいと思います。 前...

シリアルサーボモータ SCS0009 で倒立振子 屈伸動作
前回はサーボモータSCS0009を用いて倒立振子を作製し、倒立動作を確認しました。 https://homemadegarbage.com/bala06/ ここではそもそも倒立振子を製作しようと思ったきっかけである屈伸運動の検討をいたします。 https://twitter.c...