
Seeed
ついに達成!!! 8重倒立への道4
前回はSHISEIGYO-1の筐体を新造して、7重倒立の検討を実施しました。 https://homemadegarbage.com/reactionwheel78// ここでは安定的7重倒立を実現させて、ついに8重倒立に挑戦します。 8台のモジュール 今...
電子工作 2026.1.18 お父ちゃん ![]()




7重倒立に挑戦3 ついに実現!! ーリアクションホイールへの道75ー
現在挑戦中の7重倒立 https://homemadegarbage.com/reactionwheel74// 前回は6重倒立まで確認しました。 7重倒立 6/7クリア pic.twitter.com/62W9bQGo8p — HomeMadeGarbage...
電子工作 2025.1.28 お父ちゃん ![]()

3重点倒立 ーリアクションホイールへの道70ー
先日 SimpleFOCでのブラシレスモータ制御による3軸姿勢制御モジュールを製作しました。 https://homemadegarbage.com/simplefoc08/ これにより手元に3機の3軸姿勢制御モジュールがそろいましたのでちょっと余計なことをしてみました。 &n...
電子工作 2024.10.7 お父ちゃん ![]()

SHISEIGYO-3 DC Go がゆく ーリアクションホイールへの道69ー
ずーーっと3軸姿勢制御モジュールの活用方法を考えてきて答えを出せずにいたのですが、ドローン用の小型モータによる3軸モジュール SHISEIGYO-3 DC を完成させたのを機に実際に手を動かす勇気めいたものが湧いてきました。 https://homemadegarbage.com/reaction...
電子工作 2024.5.30 お父ちゃん ![]()
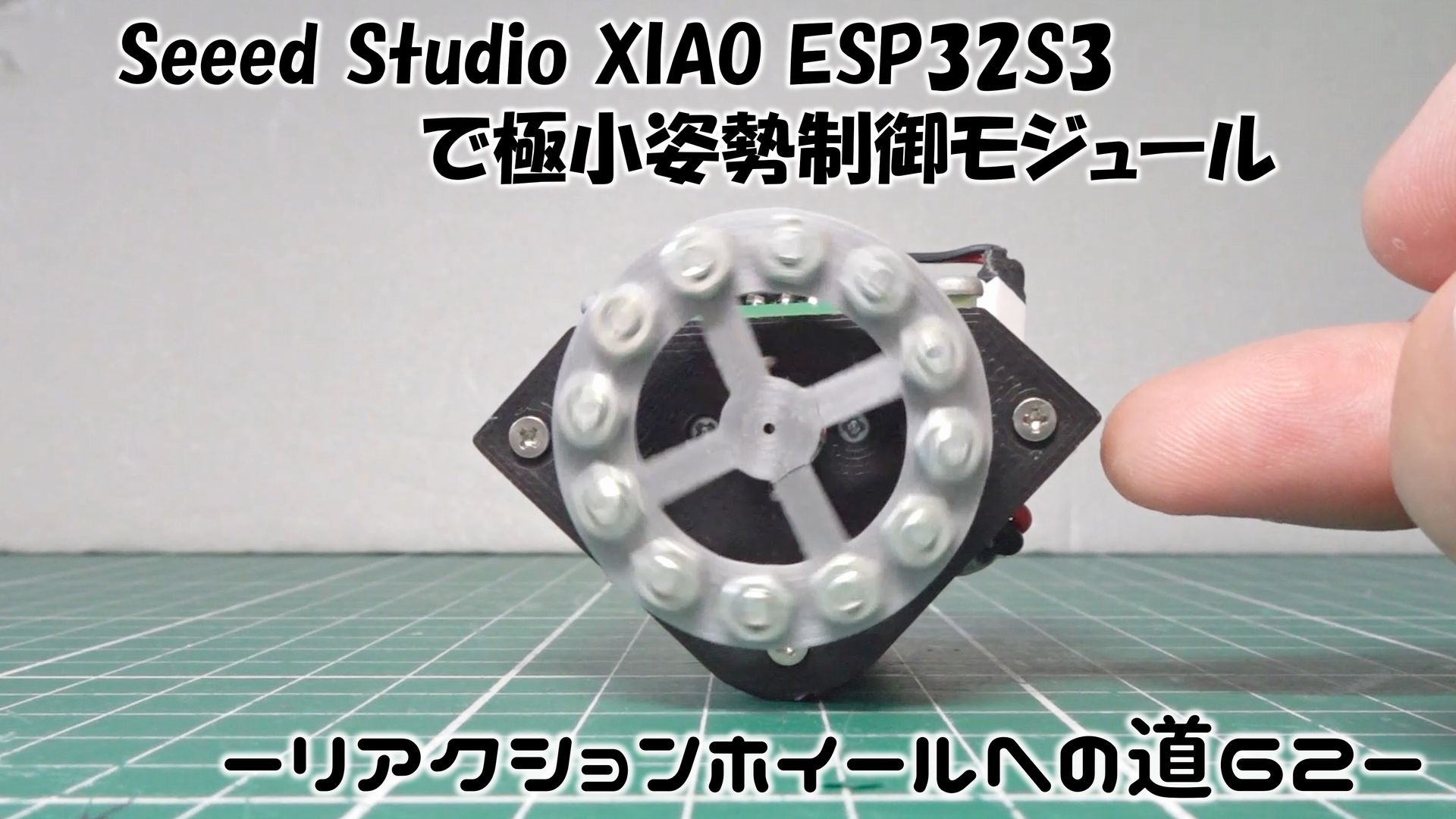
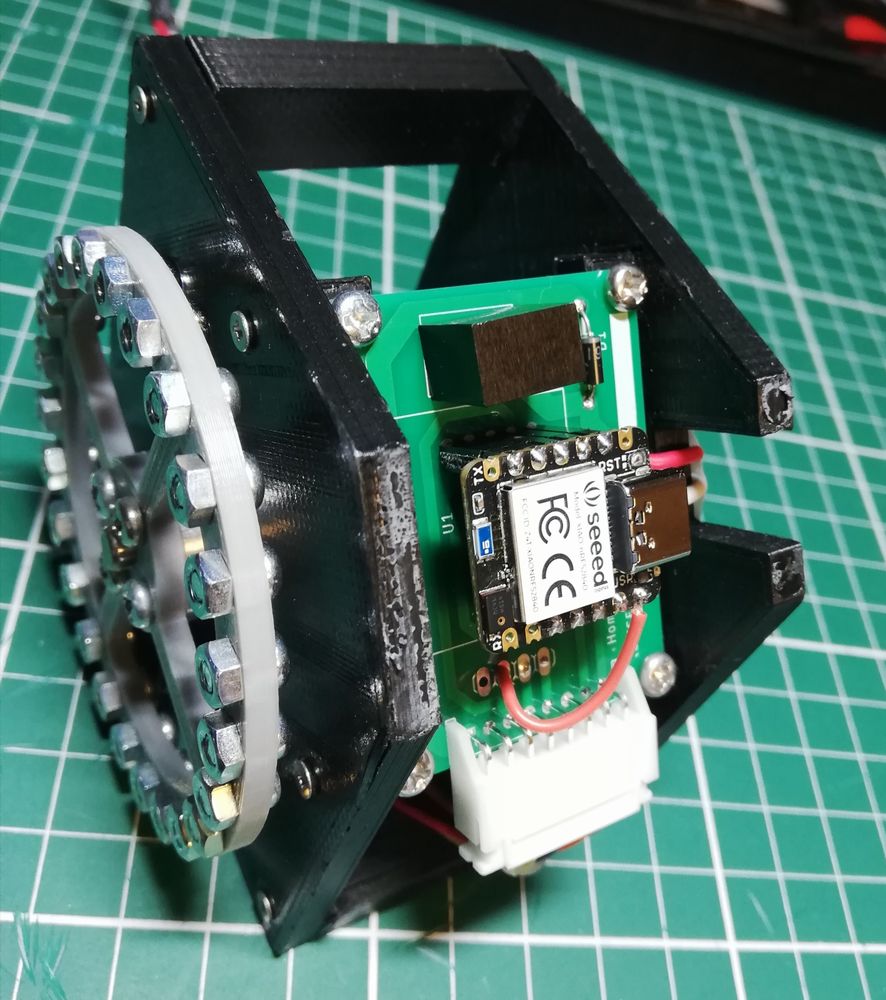
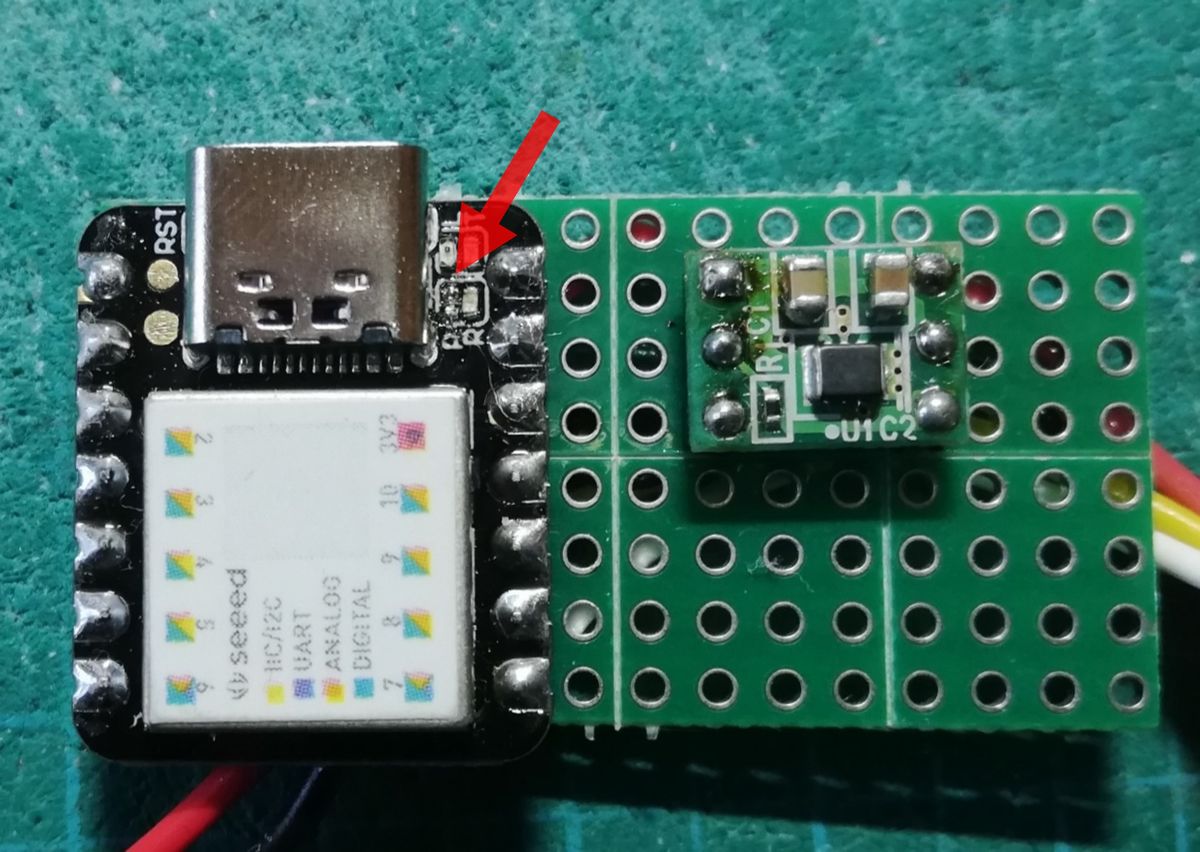
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
HomeMadeGarbage Advent Calendar 2023 |18日目 そろそろ多重倒立がしたくなってきました。たまに来るこの感情 現状の記録は5重。 https://twitter.com/H0meMadeGarbage/status/1640186881903042561 ...
Advent Calendar / 電子工作 2023.12.18 お父ちゃん ![]()

M5Stack UnitCatM 位置情報送信システム実証実験
以前製作したM5Stack UnitCatMを用いた 位置情報送信システムの実証実験を実施しましたので報告いたします。 構成おさらい 製作した位置情報送信システムの構成をおさらいいたしましょう。 制御はマイコンXIAOで実施し、30分おきにスリープから起床し5...
IoT 2022.8.10 お父ちゃん ![]()

ロボット犬『Mini Pupperミニぷぱ』で 書道
これまでミニぷパに色々な動作や機能を実装し楽しんでまいりましたが、 ついに字を書けるようになりました! 動作 早速 凛々しい書道スタイルをご覧ください。 ロボット犬が文字を書く pic.twitter.com/0UGeUNsNR1 — HomeMadeGarba...
電子工作 2022.2.28 お父ちゃん ![]()

ロボット犬『Mini Pupperミニぷぱ』を AIカメラ HuskyLens で堪能
前回は9軸 IMUセンサ BNO055を用いてミニぷぱ制御を楽しみました。 https://homemadegarbage.com/minipupper11/ ここでは更に AIカメラ HuskyLensを追加して ミニぷぱを賢くしちゃいます。 AIカメラ ...
電子工作 2022.2.20 お父ちゃん ![]()
Seeed XIAO BLE nRF52840 Sense で1軸 姿勢制御モジュール 製作
先日はSeeed XIAO BLE nRF52840 Sense の味見をいたしました。 https://homemadegarbage.com/xiao-sense01 [bc url="https://www.seeedstudio.com/Seeed-XIAO-BLE-Sense-nRF5...
電子工作 2022.1.20 お父ちゃん ![]()
Seeed XIAO BLE nRF52840 Sense を使ってみた
Seeed XIAO BLE nRF52840 Sense を購入し味見してみましたので報告いたします。 [bc url="https://www.seeedstudio.com/Seeed-XIAO-BLE-Sense-nRF52840-p-5253.html"] ...
電子工作 2022.1.18 お父ちゃん ![]()
M5Stack UnitCatM 位置情報送信システムの省電力化
前回はUnitCatM で通信基地局位置情報を取得して長期運用を試してみました。 https://homemadegarbage.com/catm06/ 30分おきに位置情報をサーバに送る仕様で、400mAhのLiPoバッテリで121時間動作しました。 ここでは消費電力を低減して更に長期の動作...
IoT 2021.11.2 お父ちゃん ![]()
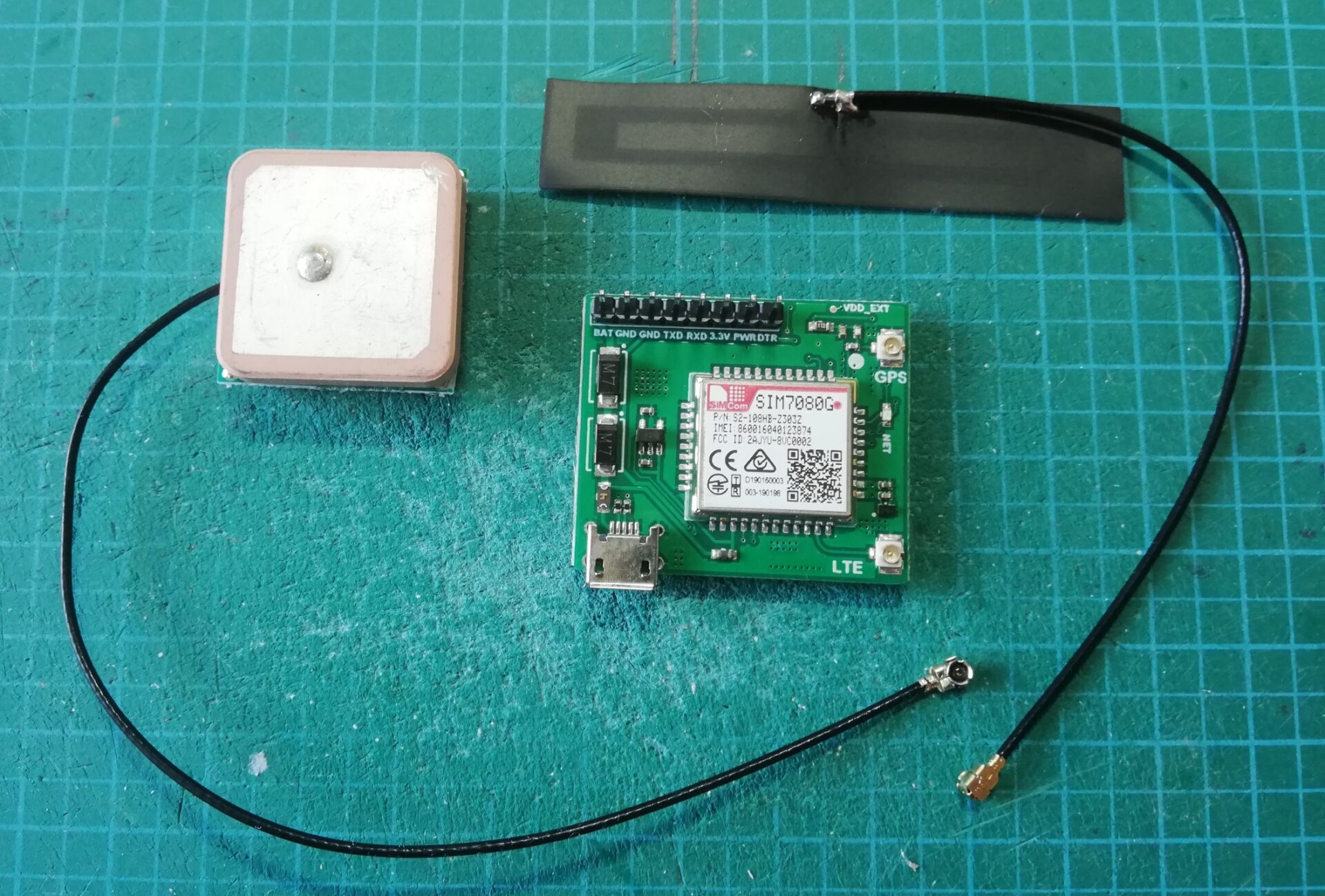
M5Stack UnitCatM 番外編 SIM7080G EVAボードを楽しむ
これまではM5Stack製の SIM7080G CAT-M/NB-IOT Unitをつこて色々検証してきました。 [bc url="https://shop.m5stack.com/products/sim7080g-cat-m-nb-iot-unit?variant=4049380216030...
IoT 2021.10.9 お父ちゃん ![]()