SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
本記事にはアフィリエイト広告が含まれます。
電源を入れると点倒立するまで自律的に パラメータ調整しつつ動き続けるシステムを確立いたしました。
名付けて
“SHISEIGYO-3-eternal “
です。
動作は見ていただいた通りなのですが、ここでは開発の流れを紹介させていただきます。
目次
筐体検討
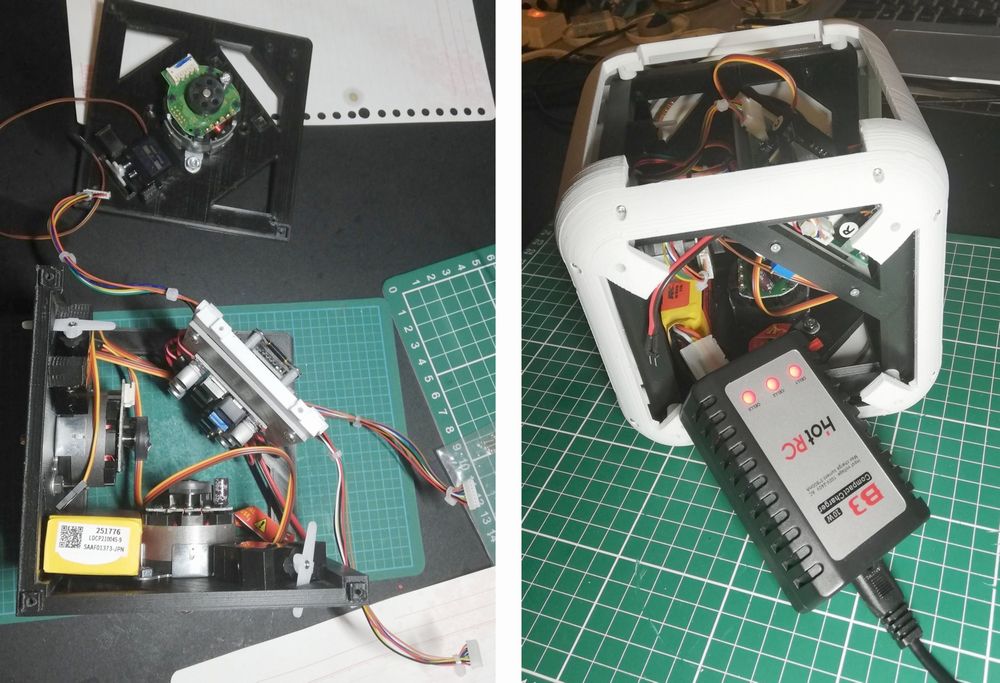
SHISEIGYO-3は上部が解放された筐体となっていますが、SHISEIGYO-3-eternalは立方体の筐体を採用することにしました。
自律動作を実現するにあたり、モジュールはかなりの回数転倒する可能性があり筐体に強度が必要であろうと考えたためです。
とりあえずSHISEIGYO-3の外部筐体を立方体にしてみました。
SHISEIGYO-3 炭治郎
筐体立方体にしたら重くて起き上がれなくなった
軽量化検討中#リアクションホイールへの道#鬼滅の刃 pic.twitter.com/eaKX3UeELb— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2021
点倒立は安定して実施できますが、筐体の重量が増したため起き上がり動作は出来なくなりました。
筐体軽量化
モジュールが極力軽くなるように、強度が落ちない程度に軽量化を目指しました。
29g 減った pic.twitter.com/R0hEzeOk3d
— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2021
ブレーキ改良
SHISEIGYO-3は以下のように3軸すべて一方方向への起き上がり動作しかできませんでした。
TPU Brake System for SHISEIGYO-3#3Dprinting #motor pic.twitter.com/DVyjStqAvj
— HomeMadeGarbage (@H0meMadeGarbage) November 19, 2020
自律的点倒立実現のためには3軸すべてで左右どちらにも起き上がれることが望ましいです。
そこでバンドブレーキを改良し両方向への起き上がり機構を実現しました。
バンドブレーキを改造し両方向への起き上がりを実現いたしました。
ブレーキはTPUフィラメントでこしらえサーボモータで動かしています。#リアクションホイールへの道Miuzei マイクロサーボ 9g 180° 10個セットを Amazon でチェック! https://t.co/kC1psFIIYl pic.twitter.com/x4ADzv152D
— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2021
フライホイール検討
筐体の軽量化とブレーキの改良を実施しましたが、まだまだモジュールを自由自在に起き上がらせて動かすことはできませんでした。
倒立は立方体のほうが
というよりモジュールの重量重いほうが安定するのよ
制御スパンもゆっくりでよくなるので。でも起き上がったりひっくり返したりしたい
モータのトルクはもう限界なので
あとはもうブレーキ変えるか
ホイールいじるしかないなぁ pic.twitter.com/7dJECJXD46— HomeMadeGarbage (@H0meMadeGarbage) March 24, 2021
慣性モーメント向上
そこでフライホイールの慣性モーメントを向上させて、起き上がり動作を実現させることにしました。
3Dプリンタでフライホイールにナットを追加できる治具を製作して慣性モーメントを増加させました。

これにより左右の起き上がり動作を実現することができました。
無事、フル実装の立方体筐体でも左右起き上がり達成
左右起き上がり辺倒立は夜のおかずにします。#リアクションホイールへの道 pic.twitter.com/3QNmJa7qnC
— HomeMadeGarbage (@H0meMadeGarbage) March 25, 2021
3Dプリント
フライホイールの慣性モーメント向上で左右の起き上がり動作が実現できそうでしたので3軸すべてに展開します。
しかし現状の直径120mmのホイールにバンドブレーキを実装すると、隣り合う面で干渉してしまい3軸に展開ができませんでした。
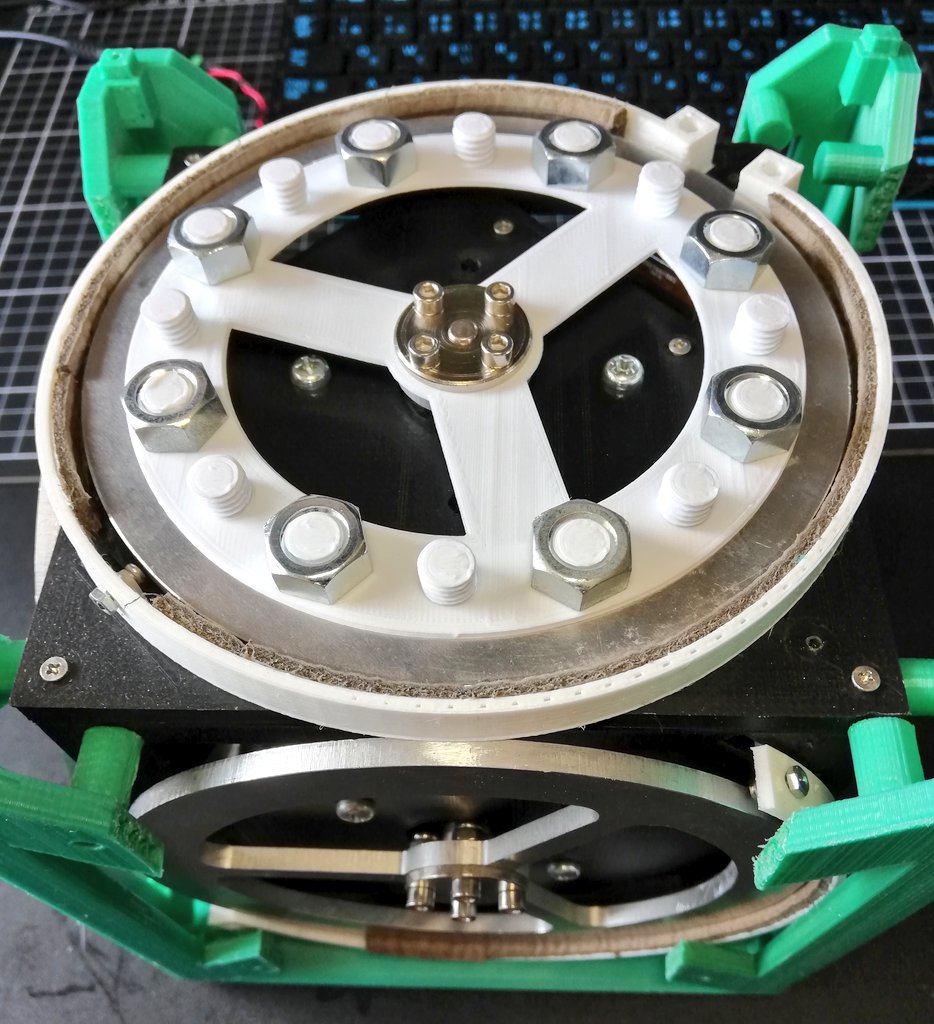
そこでホイールの直径を小さくすることにし、フライホイールを3Dプリンタで出力することにしました。
モータシャフト固定部のみ市販品を流用しました。

分子間力
フライホイールを3Dプリントすることでサイズやナットによる慣性モーメント調整は容易になったのですが、ここで大きな問題にぶち当たります。
3DプリントしたPLAフィラメント製のホイールがブレーキ時にバンドブレーキの革とくっつく現象が起きたのです。
【疑問】
アルミのホイールの時には起きなかったが
PLAでホイールをこしらえて発生した現象ブレーキ後に革とホイールがくっつく
ホイールのサイドにマスキングテープやビニルテープ貼っても同じであった。ホイールサイドをヤスると若干改善した気がする。
摩擦熱?界面?
こんなの習ってない。 pic.twitter.com/Gz2SGIxCh3— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2021
この現象をtwitter上で問うたところ、分子間力でくっついているのではという助言をいただきました。
確かに以下の動画のように
・革ーPLA
・革ー紙(マスキングテープ)
・革ービニルテープ
と高分子っぽいものがくっつき、
・革ーAl
・革ーCu
はくっつかなかったのです。
そこでPLAフィラメントで出力したフライホイールはサイドに銅箔を張り付けて、この吸着を避けることにしました。
まさかこんなところで分子間力を目の当たりにすることになるとは。。。驚きました 🙄 。
筐体再検討
フライホイールを3Dプリントし直径を小さくして3軸すべてに改良ブレーキを搭載することができました。
オーパーツ pic.twitter.com/qvwKD33yL6
— HomeMadeGarbage (@H0meMadeGarbage) March 29, 2021
しかし、フライホイールの重量が増したこともあり依然として縦横無尽にモジュールを動かすことはできません。。。。
いよいよ詰んだかとあきらめかけたとき以前製作したSHISEIGYO-1Rを思い出しました。
【SHISEIGYO-1R 】
倒立角動的再調整システム(IDRS)を搭載することで
傾きが大きくてもホイールの回転が抑制され
実に制御しやすくなった♪#成長SHISEIGYO-1Rについては☟
https://t.co/whH1ZFTxwdInverted angle Dynamic Readjustment System (IDRS)については☟
https://t.co/LHXohospPx pic.twitter.com/WDEFvLH1Mx— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2020
丸くすればさほどトルクなくても所望の角度に移動できたなと。。。
筐体の角丸めればいいじゃん!
3軸すべてで左右起き上がり実現できました。#リアクションホイールへの道#ReactionWheel pic.twitter.com/95hakU9M9i
— HomeMadeGarbage (@H0meMadeGarbage) April 1, 2021
筐体の角をできるだけ丸めて起き上がり時に必要なトルクの低減を行い、
無事に3軸の左右起き上がりを実現できました。
見た目も可愛いです 😛
起き上がり辺倒立と点倒立も実現できました。
起き上がり辺倒立クリア#リアクションホイールへの道#ReactionWheel pic.twitter.com/zmSDC2nJqi
— HomeMadeGarbage (@H0meMadeGarbage) April 2, 2021
おわりに
ざっと以上のような流れでSHISEIGYO-3-eternalを実現することができました。
自律動作の精度や電源線の巻き込み防止などまだまだ課題はございますので
引き続き研究を続けていきたいと思います!
どっかで展示できればいいなぁ。
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 基板製作 ーリアクションホイールへの道34ー
3軸 姿勢制御モジュール SHISEIGYO-3 基板製作 ーリアクションホイールへの道34ー
 SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
 バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー
バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
 3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
とても興味深い記事でした.差し支えなければ,最終的なSHISEIGYO全体の質量と,モータのトルクはどの程度の大きさになったか教えていただけませんか.
分子間力などではなく、単に摩擦熱でPLAが溶けたんだと思います
Homemadegarbage 様
SHISEIGYO-3-弐 に挑戦中です、あともう少しのところでどうしても点倒立に至りません。
SHISEIGYO-3-eternal は安定しているとのこと、こちらで挑戦してみたいのですが、レシピの販売予定はありますでしょうか。
ご検討の程よろしくお願い致します。
SHISEIGYO-3-eternalのレシピ販売の予定は今のところございません。
>SHISEIGYO-3-弐 に挑戦中です、あともう少しのところでどうしても点倒立に至りません。
loopDelayを5から小さくして制御ループ時間を短くするなどはいかがでしょうか?
また24V電源は何をご使用してますでしょうか?
ご教示のほどよろしくお願いいたします。
Homemadegarbage 様
お手数をお掛けします。
24V電源は、SHISEIGYO-1 のレシピにある、24V2A 汎用 ACアダプターを使用しています。
ご確認の程お願いいたします。
SHISEIGYO-3では4A以上のACアダプタを推奨しております。
3個のモータを駆動するので電流が足りず点倒立できていない可能性があります。
ご確認のほどよろしくお願いいたします。
Homemadegarbage 様
アルミ製ホイールでの挑戦はあきらめて、3Dプリンターでホイールを作りました。
市販のシャフト固定金具ですが、M3x8のネジのピッチが違うのか締め付けができません。
特殊なネジが必要でしょうか、ご教示の程お願い致します。
申し訳ございません。
コチラ インチネジ #4-40を使用する必要があります。
M3ネジの固定具も販売しておりますのでレシピを修正させていただきます。
インチネジ #4-40でご対応のほどよろしくお願いいたします。
ご指摘の通りでした。
改めてレシピで検索したところ、購入済み(SHISEIGYO-3 の時)となっており、ホイールの径の問題で一時中断した際しまい込んでいました。
SHISEIGYO-3-弐では、度々電源ダウンが起きており、電流不足が原因だったのですね。
金具締付用のインチネジも、今日入手予定となっていますので、推奨の5Aアダプターを使用して再挑戦します。
結果が出ましたら改めて報告をさせていただきます。
ご指導ありがとうございます。
Homemadegarbage 様
PLA製フライホイールで挑戦を再開しましたが、銅箔とブレーキバンドが絡んで緊急停止してしまいました。(サーボのアーム破損)
外径の振れが大きかったのかも知れません。
供給電源の電流不足が解決したので、又、アルミ製に戻し再挑戦しています。
パラメーターのKLR値で、PLA製は12.0、アルミ製は9.0を推奨されていますが、この中間数値も有りと考えても大丈夫でしょうか。
ご教示の程お願い致します。
サンプルコードのパラメータ値は実機に合わせて調整のほどよろしくお願いいたします。