ロボット犬つくってバク転させてみた
本記事にはアフィリエイト広告が含まれます。
前々からやってみたいと思っていたロボット犬のバク転を実現するべく頑張りましたので報告します。
これやってみたいよなー
ミニぷぱでも試したことあるけど、サーボのトルクや足の構造上で無理でした。
難しい
今後コレは バク宙問題として取り扱うことになる pic.twitter.com/5fqL7FLxqx— HomeMadeGarbage (@H0meMadeGarbage) November 15, 2022
目次
シリアルサーボ STS3032
最近はシリアルサーボ STS3032 を用いて、ジャンプする倒立振子や起立して倒立する Wheel-Legged Robot を実現するなど 非常に良い結果を得ておりました。
屈伸型倒立振子#電子工作 #3Dプリンタ pic.twitter.com/JVUM8i9W7S
— HomeMadeGarbage (@H0meMadeGarbage) August 21, 2023
Wheel-Legged Robot はこれやんなきゃ#Robotics pic.twitter.com/rsnzs71Q3S
— HomeMadeGarbage (@H0meMadeGarbage) August 26, 2023
この小型で軽量なのにトルクとスピード十分のシリアルサーボ STS3032 をロボット犬に適応させれば、夢のバク転 実現ができるのではと考えました。

ロボット犬 製作
STS3032 を用いてロボット犬を作ります。
またなんかしようとしてるわ pic.twitter.com/g47fHje0jx
— HomeMadeGarbage (@H0meMadeGarbage) October 17, 2023
倒立振子やWheel-Legged Robot での機構を流用するので筐体設計はすぐに終わりました。
すこしガチめのロボット犬
なにげに初めて作った。
非裕福なのでロールなしの8軸 pic.twitter.com/BKOAOi0rPV— HomeMadeGarbage (@H0meMadeGarbage) October 17, 2023
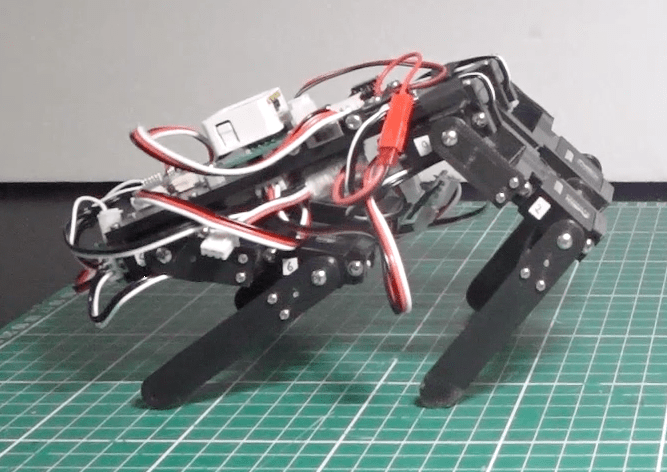
今回はロール軸なしで1足に2個のサーボを使用する8軸のロボット犬としました。
歩行はミニぷぱで研究済みなので容易に実現できました。
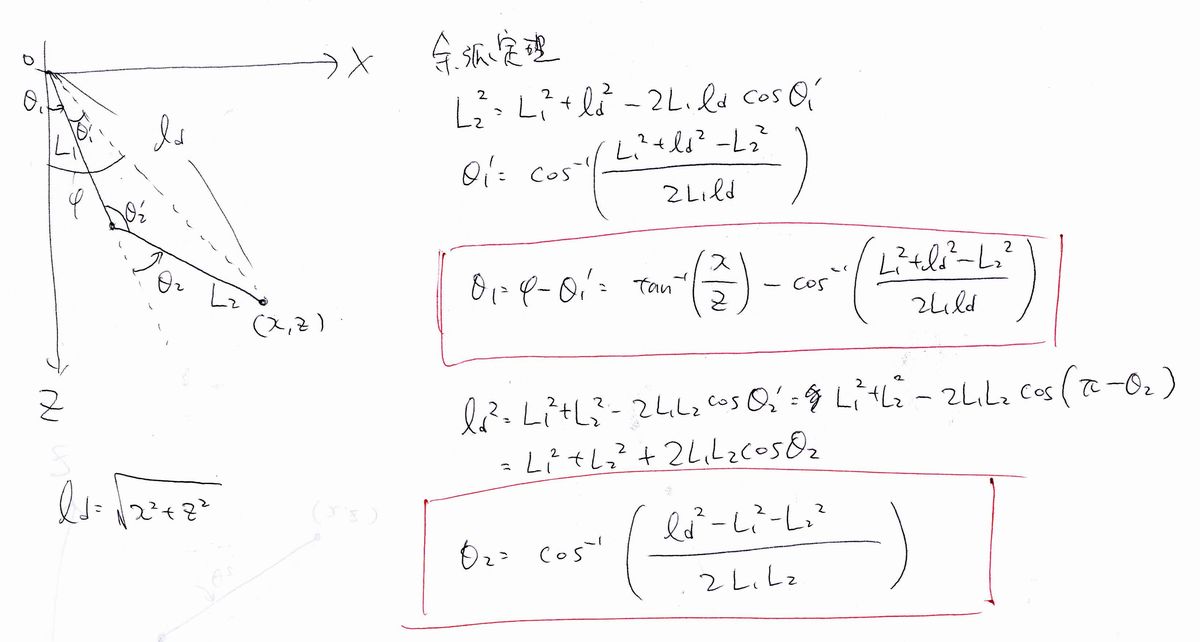
足先の座標を指定して逆運動学によってサーボの角度を導出して制御し歩行などを実現します。
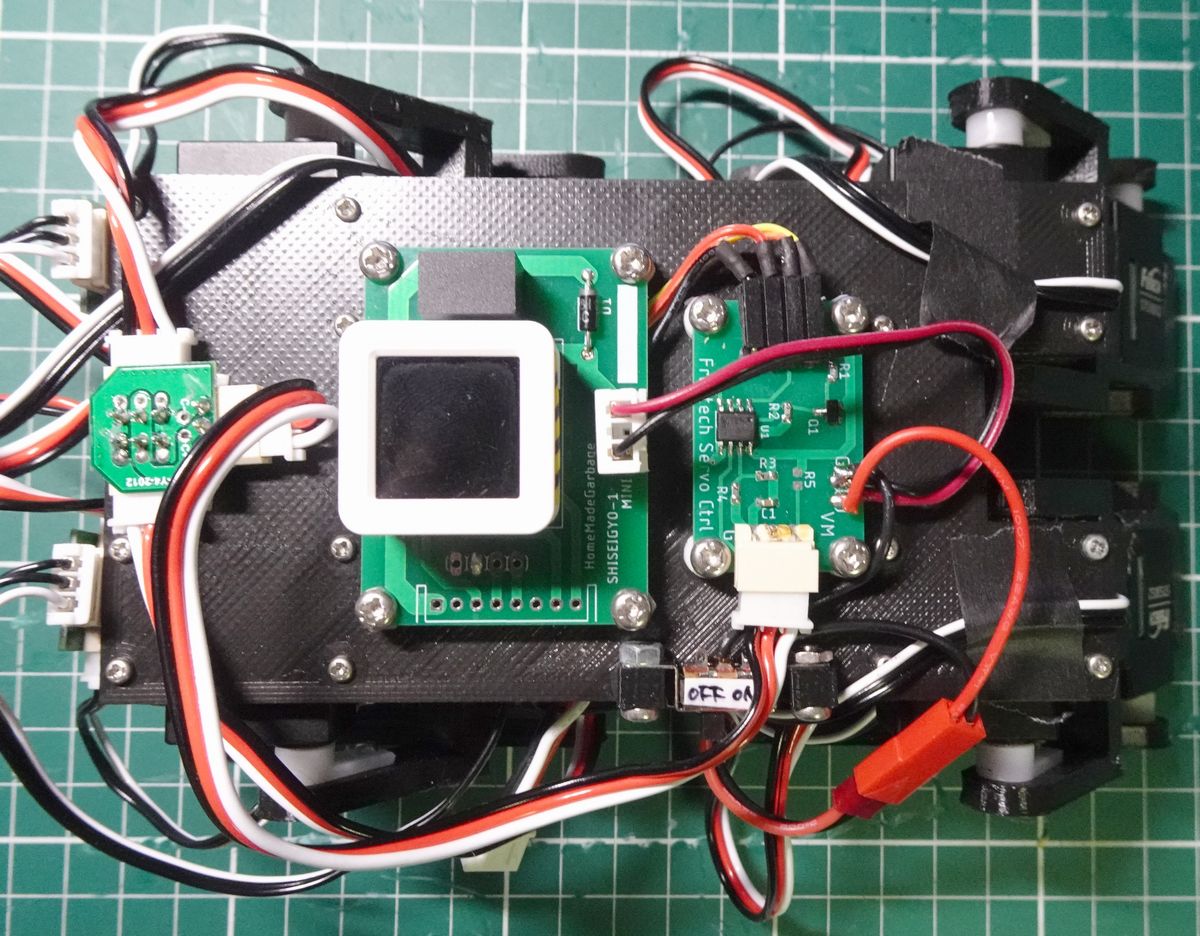
倒立振子やWheel-Legged Robot と同様にコントローラにはATOMS3を採用し、自作のFeetechサーボ通信基板を使用。
ロボット犬つくった pic.twitter.com/Vg4aFcR8QO
— HomeMadeGarbage (@H0meMadeGarbage) October 17, 2023
その他 動作
せっかく製作したのでバク転の検証前に歩行以外の動作も楽しみました。
ATOMS3にIMUセンサが内蔵されているのですから、これやらないとバチが当たりますよね。
ジャンプ動作も確認しました。なかなか元気でバク転実現への期待が持てます。
飛んだ pic.twitter.com/3pmJsNVHtW
— HomeMadeGarbage (@H0meMadeGarbage) October 18, 2023
ジャンプ#robot pic.twitter.com/Nv5yNchs6T
— HomeMadeGarbage (@H0meMadeGarbage) October 19, 2023
バク転に挑戦
冒頭の動画や以下の動画など バク転ロボット犬の動画を見まくって動作を研究し、実機に応用してバク転に挑戦しました。
Want your robot to learn agile skills without reward shaping or designing expert controllers?
We propose WASABI which allows Solo, a quadruped robot to obtain highly dynamic skills (e.g. backflip) from only rough, partial, hand-held human demonstrations.https://t.co/sgxwxYgVrb pic.twitter.com/hRA85llFM2
— Chenhao Li (@breadli428) November 11, 2022
1stトライ
バク転むずい
足長くしてみるか。。 pic.twitter.com/2xZac0qFsU— HomeMadeGarbage (@H0meMadeGarbage) October 18, 2023
うーん。モーションが悪い気もするけど このまま進めてもちょっと無理そう。。
干渉して後方まで十分に後ろ足をのばせない問題もあったので解消しつつ足を延長しようと思います。
干渉して足が後ろにもってけないというしくじりも解消しないと pic.twitter.com/l5QgGGpTjJ
— HomeMadeGarbage (@H0meMadeGarbage) October 19, 2023
ちなみに背中から落ちまくってATOMS3のディスプレイ壊しました。。
— HomeMadeGarbage (@H0meMadeGarbage) October 18, 2023
2nd トライ
大腿と下腿の長さを41 mmから50 mmにしてみました。
クソが pic.twitter.com/VLe0n54Mlt
— HomeMadeGarbage (@H0meMadeGarbage) October 19, 2023
う~ん。。まだ厳しいですね。
延長によって後ろ足は後方まで伸ばせるようになりましたがまだ高さが足りない印象。
3rdトライ
更に下腿の長さを65 mmに延長しました。
できたー!!
動作としては以下の3パターンのみで、それぞれの足位置とパターン移行タイミングを調整して実現しました。
①しゃがむ
② 前足を伸ばして起き上げる
③後ろ足を背中後ろまで伸ばし、前足を前方に移動し跳ね上がる
おわりに
いつか実現させてみたいと思っていたロボット犬のバク転を実現させることができました。
優秀なシリアルサーボ STS3032 を用いて満を持してロボット犬をつくって早々にバク転ができちゃいました。
これも色々なロボット犬をいただいて検証してきたこととシリアルサーボをいじくっていろいろ製作してきた積み重ねがあってのことだと思います。
私はもともとセンスの塊のような工学エンジニアですが、やはり日々の積み重ねも大切だなと改めて実感いたしました。
次はこれかな。。
追記
マイクロサーボでバク転実験 (2023/10/22)
手軽なマイクロサーボでバク転できないかなとふと思ったので検証した。
以前いただいた小型ロボットに使用されていたサーボが非常に応答性が良かったので今回の実験に使用してみました。
— HomeMadeGarbage (@H0meMadeGarbage) August 1, 2023
小型ロボット犬からサーボを拝借

実験用の犬が完成。サーボの数もないので(機体の軽量化の為でもある)、サーボ4個でこしらえた。
マイクロサーボでバク転が可能かを体で覚えるための実験素体製作 pic.twitter.com/WwwCvC05ZC
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2023
全然ダメでした。
あ 全然ダメだ pic.twitter.com/PVep8jK5Fs
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2023
サーボのスピードも足りないし、トルク不足で重心のると足伸ばせないしで全然ダメでした。