Wheeled Quadruped Robot を作りたい2
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2024 |5日目
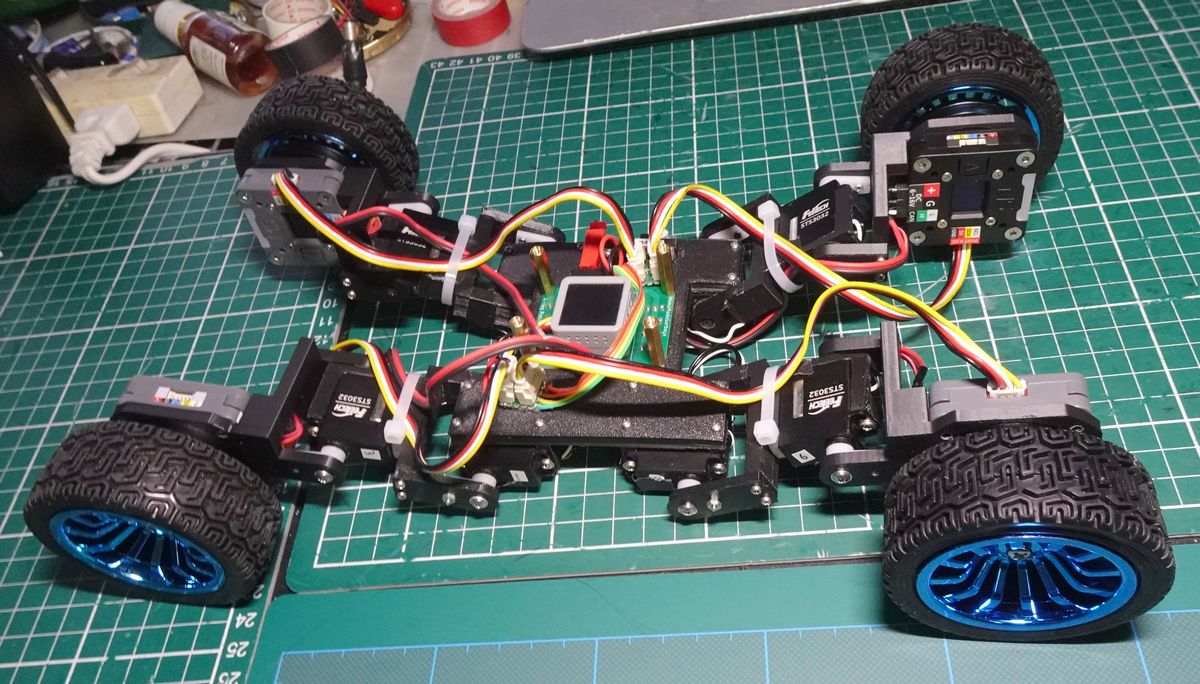
前回は4輪4脚ロボット Wheeled Quadruped Robot の実機製作を行い、基本動作である歩行や走行動作を確認しました。
ここでは最終目標であるバク転に向けて作業を進めましたので報告いたします。

目次
反転動作
バク転に挑戦する前に、まずは機体を反転させる動作の実現を目指します。
以前製作した2厘ロボットでの反転動作は以下のとおりです。
ただ前タイヤを付けた状態で上の反転動作をさせてもうまくいきませんでした。
4輪向けに動作を検証する必要があります。
モーションシーケンス生成アプリ
4輪4脚ロボット Wheeled Quadruped Robot 向けに新たに動作シーケンスを考える必要が生じました。
マイコン(ATOM Matrix) にいちいち書き込みながら動作を確認するのは効率が悪いので、無線で外部から動作させるアプリの構築を検討しました。
Node-RED
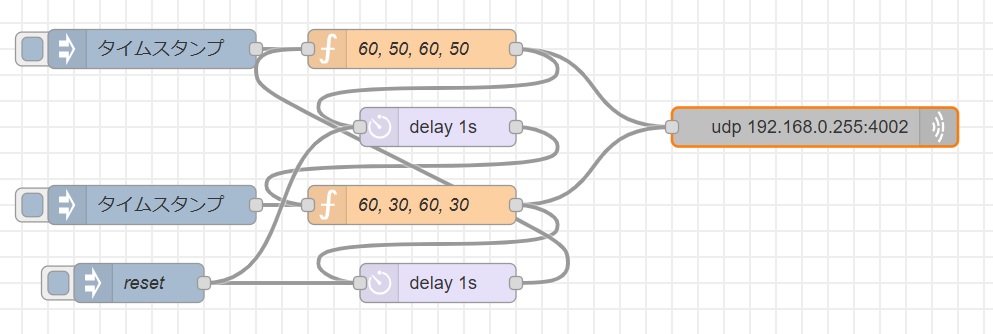
Node-REDを用いてパソコンからUDPで足座標を指定してモーションを構築することにしました。
マイコンでモーション作りこむのきついので外部コンピュータでモーションシーケンス組むことにした#nodeRED #udp pic.twitter.com/H9yzk4savs
— HomeMadeGarbage (@H0meMadeGarbage) December 2, 2024
意外とリアルタイムに応答するもんですね。すごいね 既存テクノロジー
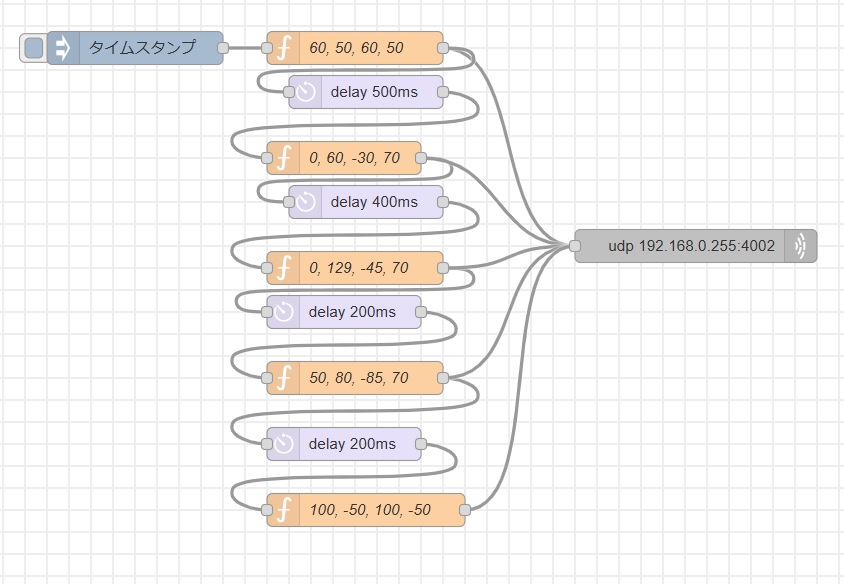
モーションシーケンスは以下のように前足、後ろ足の高さと前後の座標とディレイを組み合わせて送信して構築します。
Wheeled Quadruped Robot pic.twitter.com/rZIfm6YGTL
— HomeMadeGarbage (@H0meMadeGarbage) December 3, 2024
反転
反転動作のシーケンスを試してみました。
いくら動作を調整しても前足が重くて反転できない。。。
反転したいんだけど 前足重くて全然ダメだ。。 pic.twitter.com/AZVDvNZa1z
— HomeMadeGarbage (@H0meMadeGarbage) December 3, 2024
同じモーションで前タイヤを外して普通の足にすれば反転できるよ 当然。
前タイヤなけりゃ できるけどねぇ pic.twitter.com/oJe84ngi5i
— HomeMadeGarbage (@H0meMadeGarbage) December 3, 2024
おわりに
ここではモーションシーケンス生成アプリを作成して Wheeled Quadruped Robot の反転動作の確認をしました。
いきなりWheeled Quadruped Robot として頓挫するのですが、一旦 前タイヤなしの2輪でバク転動作を検証しようと思います。
一旦ね一旦