4脚ロボット SCS0009で更にしがむ
本記事にはアフィリエイト広告が含まれます。
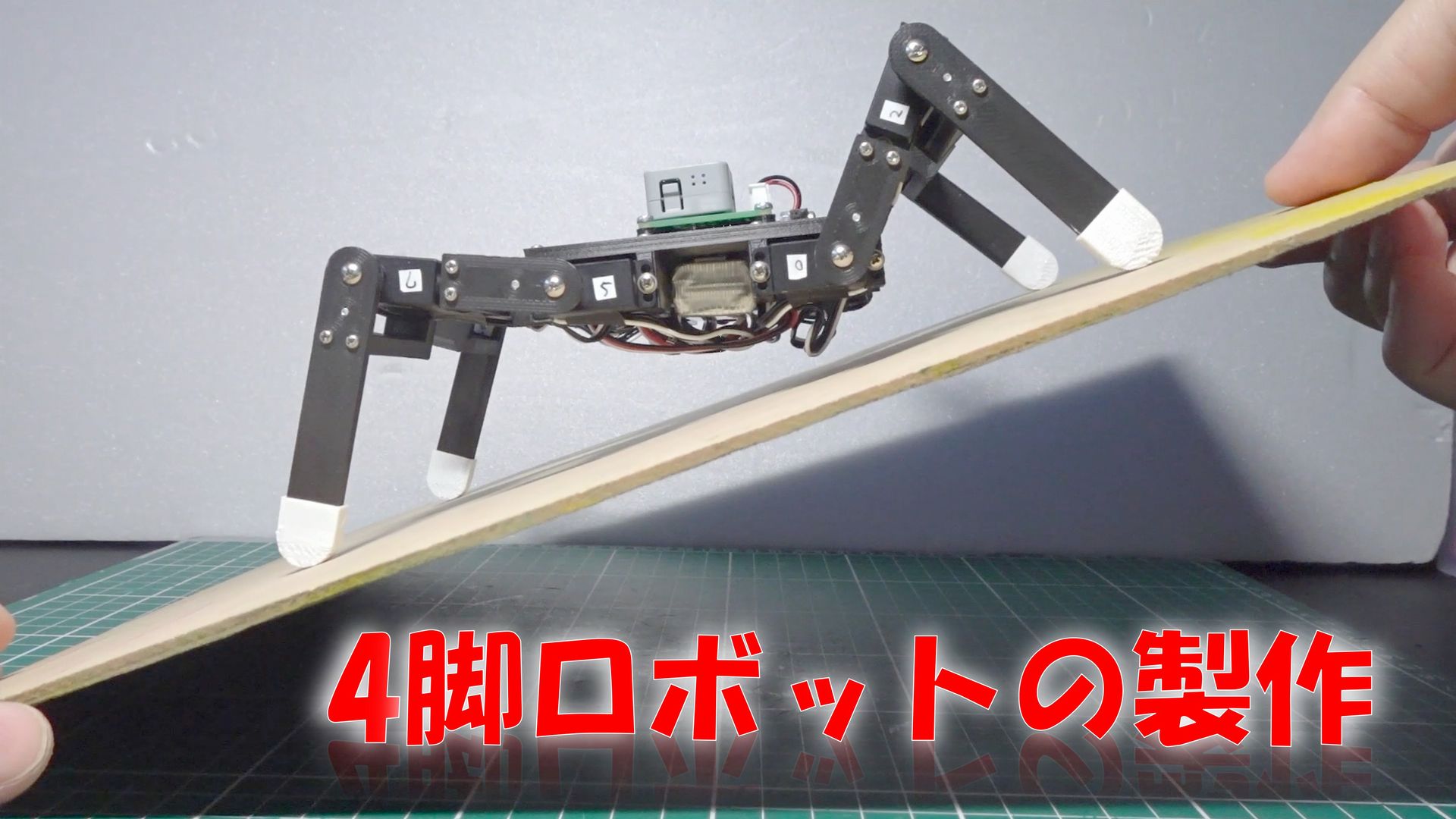
前回はシリアルサーボSCS0009による4脚ロボットでバク転動作を検討し実現に至りました。
ここでは更にこの4脚ロボットをしがむ格好で検証を進めました。
目次
基板製作
Feetechのシリアルサーボを用いた4脚ロボット専用の基板を製作しました。

サーボ8つをATOM Matrixで制御する基板です。

基板を用いてSCS0009による4脚ロボットを組みたてました。

でけた。
いい感じ 配線もスッキリしたわ pic.twitter.com/70tlJX7MLD— HomeMadeGarbage (@H0meMadeGarbage) March 18, 2024

歩行再検討
歩行の足運びを再検証しました。
ちょっと歩容を見つめ直し
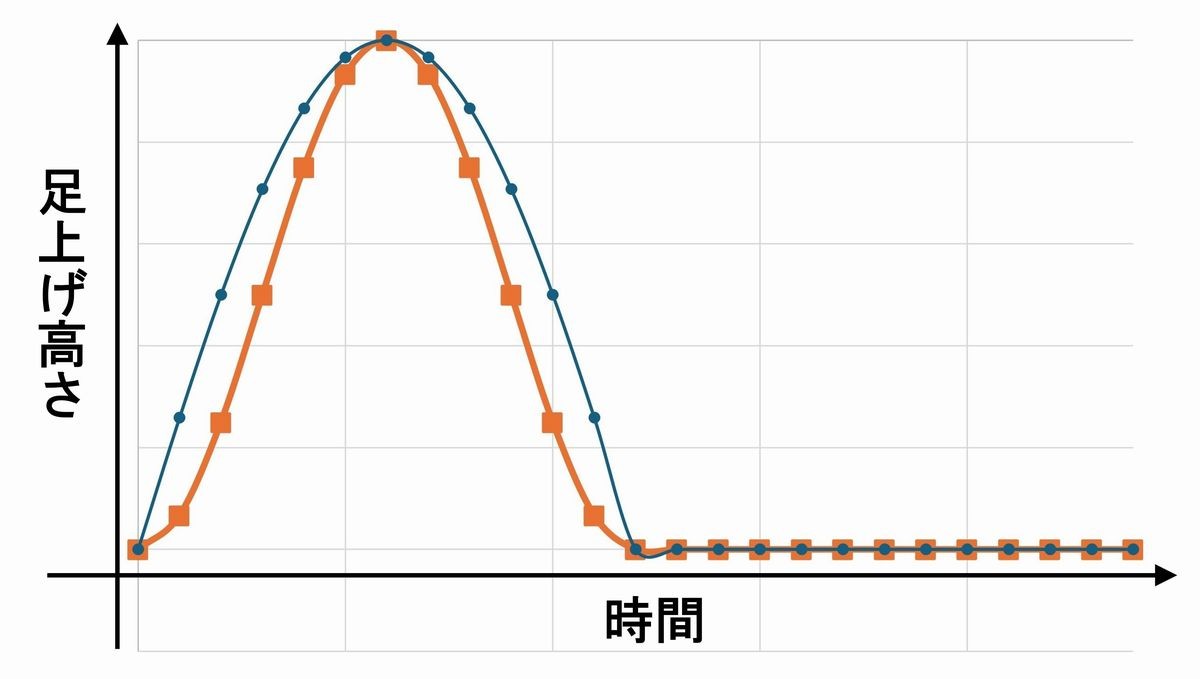
いままで足上げをサイン波の半周期で実施してたけど
コサインの全周期で実施したほうが良いと思ったのだ。
動き始めや方向転換の加速は緩やかな方がいいかと。
動きの差は大きくないけどサウンドはまろやかになった。 pic.twitter.com/Wx1YpaRqct— HomeMadeGarbage (@H0meMadeGarbage) March 18, 2024
足上げをこれまでのサイン波の半周期波形からコサインの全周期波形に変更しました。
足上げ動作の方向転換時以外にも動き始めや終わりの加速も緩やかにするべきだと考えたためです。
上の動画での比較では動きの差は大きくないですが歩行時のサウンドはまろやかになり改善がうかがえます。
足の前後移動に関しては以前より正弦波の全波波形で制御していたので、今回の修正で足の移動には動作の終始や方向転換時に完璧なるしなやかさがコーティング出来たと言えます。
バク転調整
前回 実現できたバク転の精度向上を目指しました。
現状ではSCS0009のスピードやトルクに余裕がないことからバク転が失敗することも多々あります。
たまに立つしww
進化を止めない pic.twitter.com/iexCnBc3j1
— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2024
バク転は各動作を時間でシーケンスを組んで実施していたのですが、最後の前足による回転起き上がりのタイミングを時間ではなく、ロボットの姿勢角をトリガに変更しました。
バク転時の前足の戻しの起動を姿勢角でトリガに変更
遅延時間で起動していた時に比べ確度超上昇
思いがけず2足で直立しちゃうとかもなくなってしまい寂しいが
バク転は確実に実施しときたいもんね pic.twitter.com/y3hiBjxpFy— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2024
跳ね上がって着地して機体の角地が平行に近づいて指定の角度(ここでは15°)以下になった時に前足で完全に体を起き上げます。
これにより非常にバク転の確度が上昇しました。
おわりに
ここではシリアルサーボSCS0009による4脚ロボットで以下を実施しました。
- 専用基板の製作、動作確認
- 歩行改良
- バク転動作改良
おおむね良い改善が見られ大変満足しております。
今後も自身の胸の奥で烈火のごとく燃える向上心でもって突き進みたいと思います。
製法公開
以下に製作方法をまとめております。