シリアルリンク 2足歩行ロボットの製作1 ー キックオフ ー
本記事にはアフィリエイト広告が含まれます。
先日はブラシレスモータ活用の習作として2足歩行ロボットを製作しました。
ブラシレスモータの応答性の良さと電流によるトルクセンシングによって物理に応答した生き生きとした動作が実現でき大変満足致しました。
しかし、1脚を3個のブラシレスモータで製作したため自由度が低く、平行リンク機構によって構造が複雑となり足の可動範囲にも制限がございました。
そこで習作で得た知見を元に高自由度の足を有する2足歩行ロボットの製作を開始することにしました。
目次
シリアルリンク
ディズニーのBDXドロイドの足は各関節に5個のブラシレスモータアクチュエータが使用されておりシリアルリンク構造が採用されています。
a paper worth studying😉https://t.co/oIugHiOt8B pic.twitter.com/lTcrjDMO7X
— High Torque Robotics (@HTrobotics) July 31, 2024
ここではこのドロイドと同様に5軸のシリアルリンク機構の2足歩行ロボットの完成を目指します。
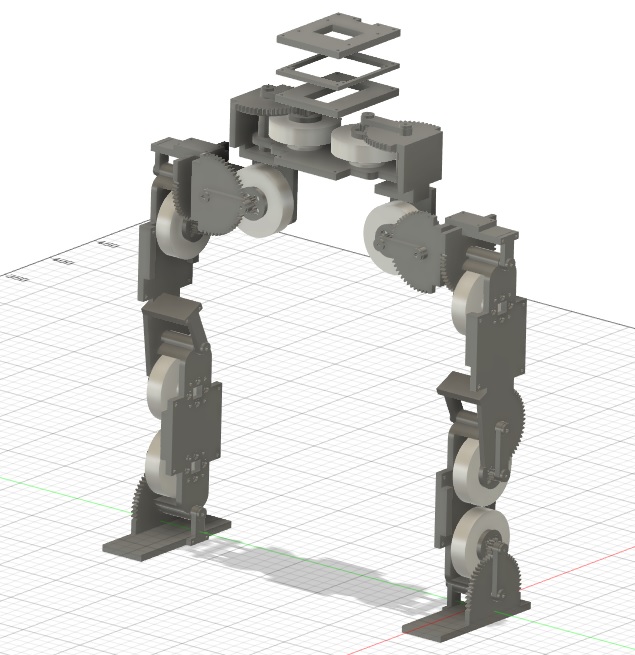
こんな感じで設計
使用部品は前回の習作ロボットと全く同じものの使用を想定しています。
味見
まずは2個のブラシレスモータを使用して足元の動作を確認してみました。
なるほどねぇ
リンク機構の方がいい気もするけどロボットも人も膝よな pic.twitter.com/BhbpMb6rt0
— HomeMadeGarbage (@H0meMadeGarbage) April 14, 2025
なかなかいい感じの動作です。
構造上 膝モータの移動範囲がかなり広くなり高速応答が要求されそうですが、機構自体はシンプルなので作りやすいです。
前作の平行リンク機構の足は複雑で大変でした。。。
またまた足強化パーツ追加
片足だけで31パーツ、ネジ20本。。。
絶対に不健全だし何か間違ってる
どこかでやり直す pic.twitter.com/j0r87GXxvG— HomeMadeGarbage (@H0meMadeGarbage) March 29, 2025
部材調達
味見したところ非常に良い感触をえたので、製作を開始するべく部材を調達

-
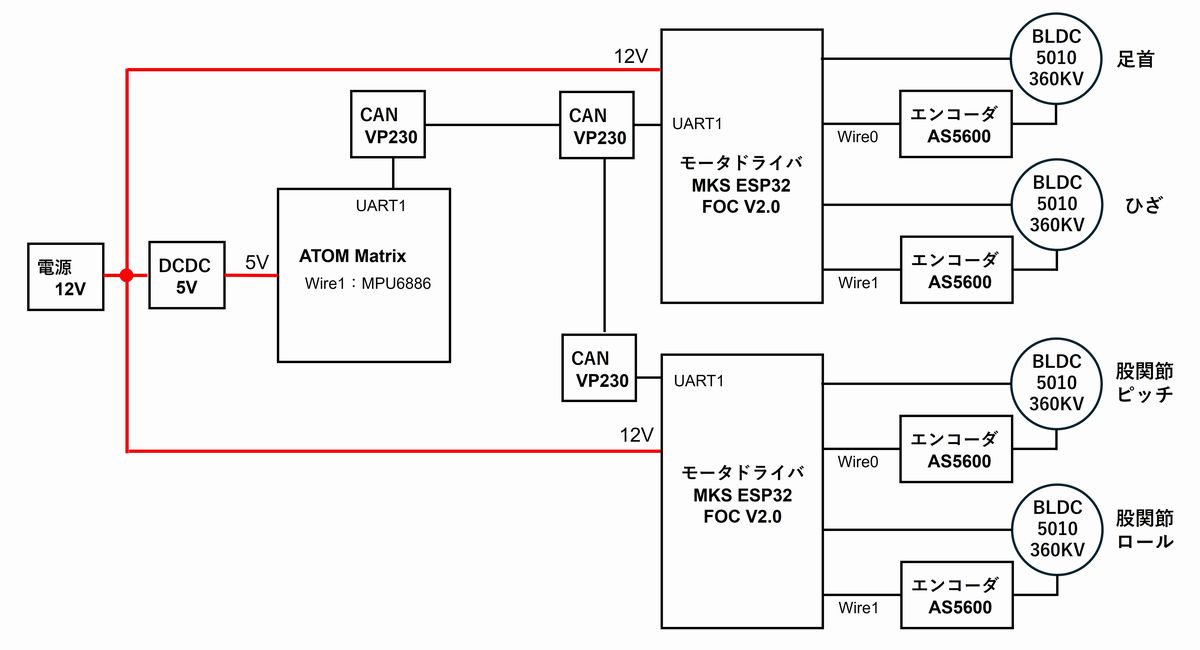
- ブラシレスモータ 5010 360KV

-
- CANモジュール VP230


-
- BLDCコントローラ MKS ESP32 FOC V2.0


- 磁気エンコーダ AS5600
[amazonjs asin=”B0CWPPFYHX” locale=”JP” title=”12ピース AS5600 磁気エンコーダ 磁気誘導角度測定センサーモジュール 12ビット 高精度”]
組立て開始
部材がそろったのでロボットを組み立てます。
まずはロール軸なしの4軸で動作確認することとしました。
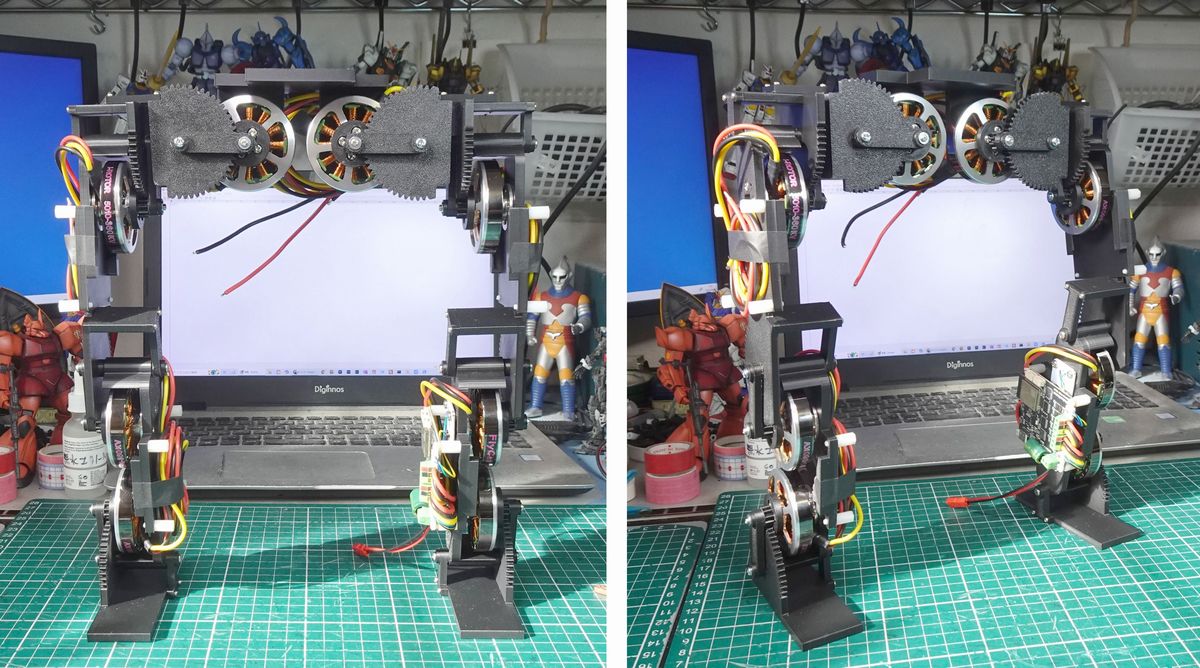
ちょっと足の間があきすぎてるかな??
動作みながらおいおい調整するかも。
股関節動作
股関節の機構はこんな感じで
— HomeMadeGarbage (@H0meMadeGarbage) April 21, 2025
動作もバッチリ
股関節テイスティング pic.twitter.com/SZsfY26H8L
— HomeMadeGarbage (@H0meMadeGarbage) April 22, 2025
片足完成 (4DOF)
4自由の片足完成!
動画では中枢コントローラATOMとPS4コントローラをつないでジョイスティックで足を動かしてます。
[amazonjs asin=”B0D4LLCLJS” locale=”JP” title=”PS4コントローラー【2024年金賞·新版】Onefun ps4 コントローラー 大容量1000mAh 背面ボタン付き マクロ機能 Turbo自動連射機能 6軸ジャイロセンサー搭載 Bluetooth無線接続 16時間連続使用 イヤホンジャック付き 高耐久ボタン ワイヤレス4コントローラー P4/P4 Pro/Slim/PC対応 日本語取扱説明書 (ブラック/ブルー)”]
構成は以下のとおり
逆運動学
足首、膝、股関節ピッチ角は以下のように逆運動で算出
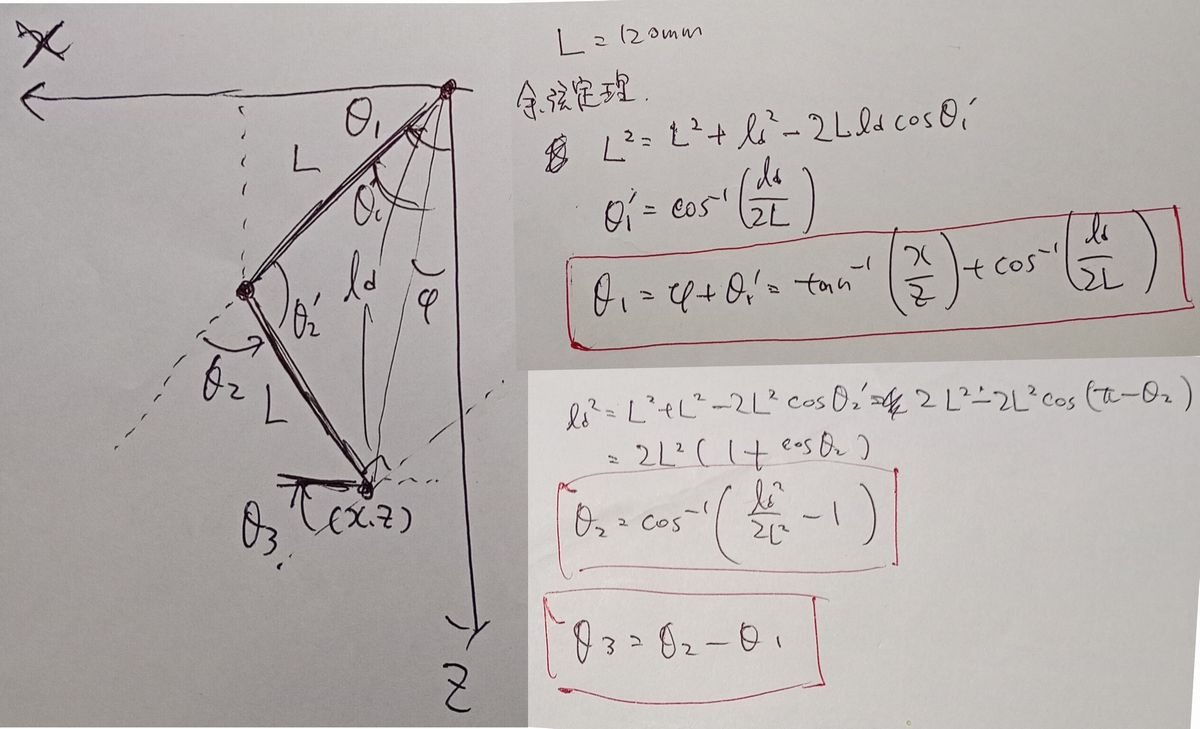
いつかきれいに清書します。
おわりに
ここではブラシレスモータを用いた高自由度の足を有する2足歩行ロボットの完成を目指しプロジェクトをキックオフしました。
ひとまず4自由度の足を1本製作できたので次回は2足を完成させて動作確認を実施いたします。
それではまた