DYNAMIXEL シリアルサーボ XL330 で倒立振子2
本記事にはアフィリエイト広告が含まれます。
最近は車輪倒立振子ばかり作っているわけですが、、
こんだけ作るとホイールを前後出来る脚付きタイプと脚なしタイプのそれぞれで制御メソッドを自分の中でガッチリと構築できるものです。
ホイールモータに関してはFOC制御によるブラシレスモータ 一択だと思っているのですが、少し立ち戻ってサーボやDCモータ駆動も検証してみたくなりました。
ここではシリアルサーボ XL330-M077 で改めて倒立振子製作をしてみました。
X330-M077は高速連続回転が可能で 今の目線だとまた見え方も変わるでしょう。
XL330 について忘れてることも多かったですが以下の過去ブログが大変参考になりました。

目次
XL330 Operating Mode
まずは専用制御ソフト DYNAMIXEL Wizard 2.0 で各種回転モードを味見してみました。
XL330を久しぶりに触る
PWMモードしか使ってなかったけど
ほかのモードも味わってみますかぁ pic.twitter.com/pjRmPKbubf— HomeMadeGarbage (@H0meMadeGarbage) April 9, 2026
XL330の回転モードには以下の3つがあります。
- PWM Control Mode
モータに印加する電圧のデューティを制御 (電圧制御みたいなものでしょうか)。
デューティを変えてるだけなのでモータの応答も非常いいです。
400rpm超えてます(電源 6V)。
過去の車輪倒立振子はこのPWMモードで動作させてます(なぜこの選択になったかは不明)。
- Current Control Mode
モータに印加する電流を制御 (トルク制御)
こちらも応答が良かったです。回転のピークは430rpmを超えておりPWMより高速でした。
- Velocity Control Mode
モータの回転をフィードバックして制御します。
速度制御器を介するため若干応答が鈍いです(回転ピーク 380 rpm)。
制御機はPIでそれぞれデフォルトのゲインは 40 / 400

ちなみにここではモータのインターフェースにFEETECH製の FE-URT-1 を使用しました。
ボーレートは車輪倒立振子に使用することを想定して2Mbpsとしています。
DYNAMIXEL製のインターフェースボードOpenRB-150はボーレート最大1M bpsのためコチラを使用しました。
車輪倒立振子
XL330の回転動作モードの味見を経て、各モードで倒立動作をみたくなったので倒立振子を製作します。
機体製作
簡単な構成なので、段ボールに両面テープで貼り付けて完成させます。

完成!
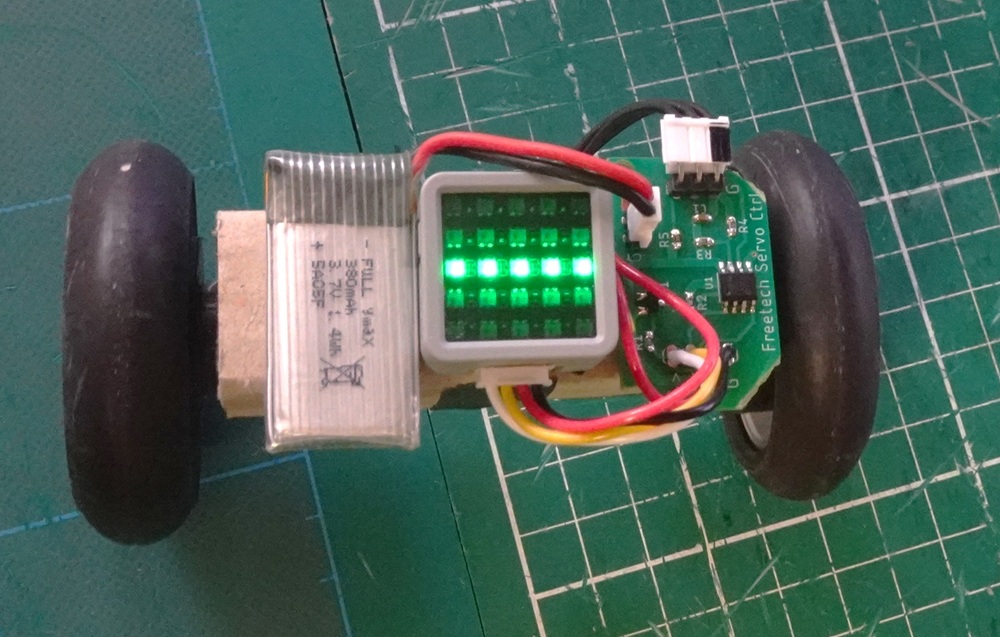
電源は 1セル LiPoバッテリ 3.7V
コントローラはATOM Matrix
半2重通信回路を介してXL330を2個つけています。
半2重通信回路は秋月のインターフェイスボード FE-URT-1販売ページにある参考資料の”インターフェイスの自作“回路を参考に基板を起こしました。
ロジック電圧を3.3Vにしてモータ入力ピンをプルアップしています。
完成した機体で各種回転動作モードを比較します。
コーディングには DYNAMIXEL2Arduino ライブラリを使用しました。
dxl.setOperatingMode()
で容易に動作モードを変更できます。
PWM Control Mode
XL330-M077
とりあえず 慣れ親しんだ PWM Control Mode
サーボでここまで出来たら上等だと思うけどね
ギア音も心地よい次Current Control Modeいきますかぁ#倒立振子 pic.twitter.com/HSmVvWajt2
— HomeMadeGarbage (@H0meMadeGarbage) April 9, 2026
これまで使用してきたPWMモードですので問題なく倒立動作ができております。
サーボモータでここまでビュンビュン走れたら十分ではないでしょうか。
Current Control Mode
XL330-M077
Current Control Mode
応答はPWMより良い感触次 Velocity Control Mode いきますかぁ#倒立振子 pic.twitter.com/XgEjVOARwZ
— HomeMadeGarbage (@H0meMadeGarbage) April 9, 2026
味見でも高速回転できておりましたが、PWMモードより良い応答で動作できています。
動きがビシビシ決まっております。
Velocity Control Mode
XL330-M077
Velocity Control Mode
どうしても応答が遅くなってしまう速度PIゲインも調整したけど(40/400→150/560)回転速度落ちるからどうしようもない#倒立振子 pic.twitter.com/fc10s7eLQ7
— HomeMadeGarbage (@H0meMadeGarbage) April 9, 2026
味見で感じた応答の鈍さがそのまま出てしまっています。
速度PI制御器のゲインも調整(40/400 → 150/560)したのですが上の動作が限界でした。
車輪倒立振子においては “よい速度制御器を組めれば速度モードのほうが良い” という結論を自分の中に持っておりましたが、今回はよい制御器を組めませんでした。
ギア比の小さくないサーボモータ (XL330-M077:1/77.5) なので回転を検知してからの応答に遅れが出るのはしかたないのでしょう。
おわりに
ここではシリアルサーボ XL330について車輪倒立振子を通して再検証してみました。
結論としまして 車輪倒立振子においては Current Control Mode が最適であるといえます。
シリアルサーボで倒立振子 pic.twitter.com/u2HSfDVwRd
— HomeMadeGarbage (@H0meMadeGarbage) April 9, 2026
もうビュンビュン走っとるわ
BLDCにひけをとっていません (もちろん機体自体も軽く軽負荷であることも大きく寄与していますが)。
シリアルサーボは簡単な配線で高レベルの制御が可能なので今後も活用していきたいと思います。