すごい Wheel-legged ロボに憧れて2
本記事にはアフィリエイト広告が含まれます。
前回は Agibot社の X2-N に憧れて自分なりのWheel-legged Robot を製作しました。
倒立モード / 直立モードの移行まで検証いたしました。
ここでは直立モード時の歩行動作の検証を実施しましたので報告させていただきます。

目次
直立モード動作検証
まずは直立モードでロール軸をロールオーバーベートーベン
2足歩行ロボット pic.twitter.com/ju1UDFSjrY
— HomeMadeGarbage (@H0meMadeGarbage) April 15, 2026
足先の前後や高さ位置はIKで指定しつつ足底のホイールも Ankle Yaw として活用します。
ホイールを Ankle Yaw として活用したい意思はある pic.twitter.com/TUQGgDkEMt
— HomeMadeGarbage (@H0meMadeGarbage) April 15, 2026
回しすぎ。。。
気を取り直しまして
シリアルサーボ XL330のEXTENDED_POSITION モードで移動角度を指定して足首をひねる。
EXTENDED_POSITION モードで足首をひねる pic.twitter.com/lFGQoQ2t6R
— HomeMadeGarbage (@H0meMadeGarbage) April 16, 2026
歩行検討
Roll、IK、Ankle Yaw 制御を自在にできるようになったので歩行検討に行きましょう (俺なら楽勝よ♪)。
やっぱり足はリンク機構に修正するわ。。
倒立モードからやり直し手戻りだけが人生だ pic.twitter.com/zKNVyvOshM
— HomeMadeGarbage (@H0meMadeGarbage) April 16, 2026
全然ダメでした。。。 😥
この構成でもすり足で何とかなるかなと思ったのですがマジで全然ダメでした。
Ankle Pitch 軸が必須なんだなぁ(´;ω;`)
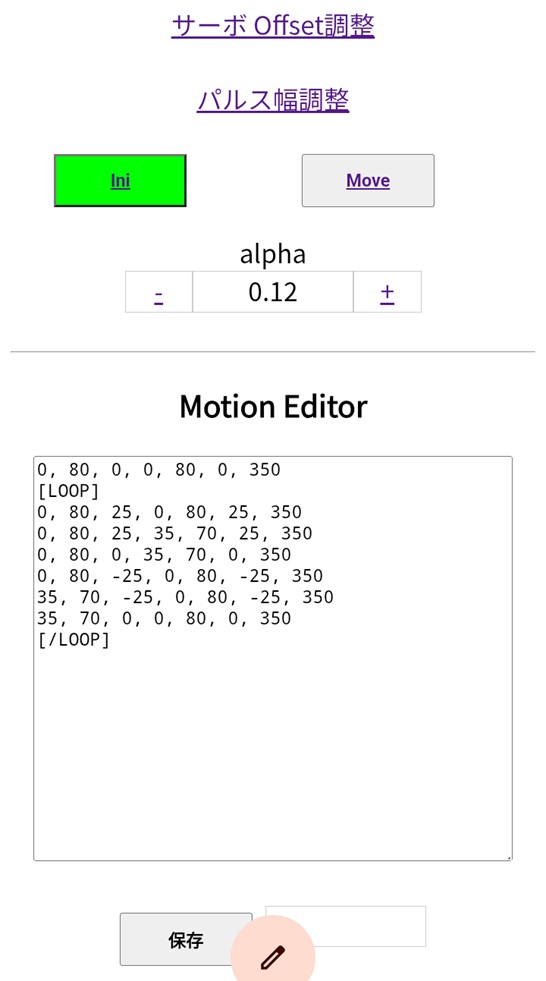
ちなみにモーションは以下のように、ESP32 (ATOM Matrix)をアクセスポイントとしてブラウザアプリでコマンドを書き込んで作りこめるようにしました。
リンク機構
もう一軸 (Ankle Pitch) 追加は厳しいので足をリンク機構に変更しようと思います。
PWMサーボの平行リンク機構は以前検証済みです。
サクッと移植していきましょう!
バーン!と修正完了
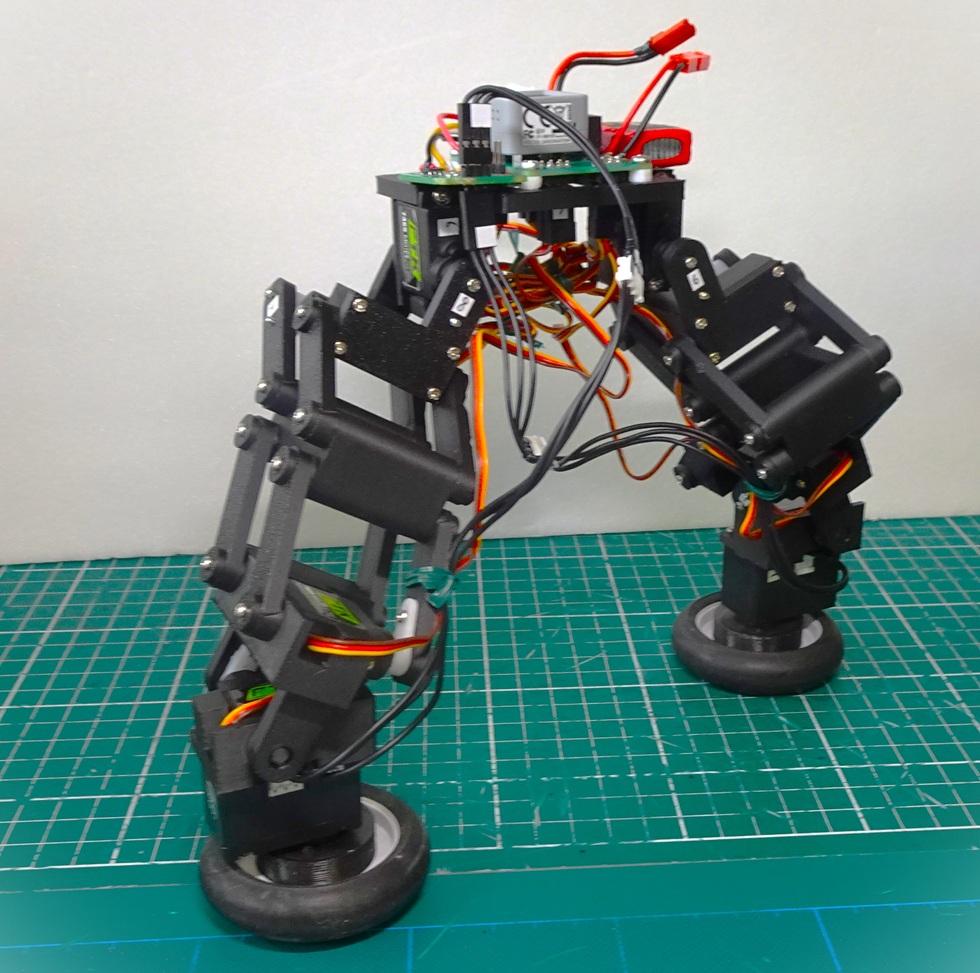
リンク機構によって足底のホイールが常に平行を保てるようになりました。
リンク機構 pic.twitter.com/PcwO2kBQP0
— HomeMadeGarbage (@H0meMadeGarbage) April 17, 2026
ちなみに足のPWM サーボ PTK7465 は以下の実に素晴らしい基板で制御しています。
歩行動作
きっちりウェイトシフトして足を運ぶ 置きにいったシーケンスですが、懸命に歩いていますね。
見よ!
この手書きシーケンスの安パイの歩行を! pic.twitter.com/lOTv1yY5zL— HomeMadeGarbage (@H0meMadeGarbage) April 17, 2026
旋回は足底のホイールを回転させて実現します。
— HomeMadeGarbage (@H0meMadeGarbage) April 17, 2026
足膝を平行リンク機構に変更し、直立モード時の歩行動作を実現することができました。
— HomeMadeGarbage (@H0meMadeGarbage) April 18, 2026
おわりに
ここでは Wheel-legged Robot 直立モード時の歩行動作の検証を実施しました。
平行リンク機構を導入することで前進・後進、旋回歩行動作を実現しました。
今回、リンク機構への変更が入りましたので、また倒立モードの検証が必要となりました。
本当に手戻り手戻りでやりたいことまだまだたくさんあるのに全然進まないわ!
言っててもしょうがないので (自分が悪いのだから。。。)、次回はリンク機構での倒立モードの検証を実施します。
逆に性能向上できるかもしれないし希望をもって進めていきましょう。
ではまた