Jetson Nano をゲットしました!
本記事にはアフィリエイト広告が含まれます。
Jetson Advent Calendar 2020 |3日目
なんとDFRobot社のプレゼント企画に当選してJetson Nanoをゲットしました!
Thank you all for participating in this event, it’s time to announce the winner! NVIDIA Jetson Nano Developer Kit goes to @H0meMadeGarbage Congratulations!
💡Buy this kit on our store: https://t.co/y9tMYMMuic
💡Keep follow our latest post, next Free Trail is coming soon! https://t.co/dzupTYQ38X— DFRobot (@dfrobotcn) February 26, 2020
前々からJetson Nanoは気になっていたのでものすごく嬉しかったです 🙂 。
今年分の幸運を使い切ってしまったかもしれません。。
DFRobotのプレゼント企画は今後もTwitterやInstagramで実施されており、色々な商品が放出される予定とのことで皆さんも是非参加してみてください。
@dfrobotcn を付けてリツイートするだけです。ほんとにもらえますよ。
目次
Jetson Nano 初期設定
届きました!ありがとうございます!! https://t.co/TmBz3lJOLF pic.twitter.com/hrlBmJOypi
— HomeMadeGarbage (@H0meMadeGarbage) March 2, 2020
Jetson Nanoを起動するに際しまして以下を用意しました。
- OS書き込み用SDカード
Jetson NanoはラズパイのようにOSをSDカードに書き込んで起動します。
- 5V/3.0A USB Micro-Bコネクタ出力ACアダプター
ここではUSBコネクタから給電します。2A以上必要とのことでラズパイ3に使用していたものを流用しました。
- WiFi USBアダプター
無線でネット接続したかったためにUSBソケットに挿入しました。
特に何の設定も必要なく繋がりました!

セットアップ
セットアップ方法は以下を参考に実施しました。
WebRTC Native Client Momoを堪能
以前ラズパイZEROで試したMomoをJetson Nanoでも試してみました!
WebRTC Native Client Momo with Jetson Nano
やっぱり早い pic.twitter.com/KgAjCZfUA3
— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2020
やはり高速で、目ではもはや遅延があるのかないのか全く分かりません!
カメラは普通のウェブカメラを使用してます。
設定方法
お掃除ロボット制御
以下のようにJetson Nanoでお掃除ロボットを制御したく
【Nintendo Switch Joycon で Hack Roomba】
Nintendo SwitchのコントローラでRoomba(ルンバ)を遠隔操作しました🤖🎉
まだRoombaさんは狂暴的な動作しますが😅笑 動けばこっちのもん💪#ROS #jetsonnano #Switch #RoombaMeRT化計画 pic.twitter.com/Oqopj1ctzP— 🐨MeRT(ルット)@🤖Navigation🐨 (@MeRTcooking) October 8, 2019
ただ家にはルンバがないので以下のおもちゃお掃除ロボットで実験しましたw
Node-RED設定
Node-REDをインストールして、以下を参考にGPIOピンを制御できるようにしました。

サーボ制御
おもちゃお掃除ロボット旋回動作はサーボで車軸をシフトさせて実現させてますので
サーボを制御するべくPWM出力させます。以下を参考にいたしました。

使用したサーボモータは以下(安い!!!)
初期設定
上記サイトを参考に32ピンからPWM出力できるようにします。
シェルで一発設定できるようにしました。
|
1 2 3 4 5 6 7 |
sudo busybox devmem 0x700031fc 32 0x45 sudo busybox devmem 0x6000d504 32 0x2 sudo echo 0 >/sys/devices/7000a000.pwm/pwm/pwmchip0/export sudo echo 20000000 >/sys/devices/7000a000.pwm/pwm/pwmchip0/pwm0/period sudo echo 510000 >/sys/devices/7000a000.pwm/pwm/pwmchip0/pwm0/duty_cycle sudo echo 1 >/sys/devices/7000a000.pwm/pwm/pwmchip0/pwm0/enable |
PWMの周期を20msec, 初期のパルス幅を510usecとしています。
Node-RED

exceノードにPWMのパルス幅を指定するコマンドを書き込んでサーボを制御しました。
それぞれのノードでパルス幅を510usec (サーボ 0°)と2500usec (サーボ 180°)に設定します。
動作
スマホからJetson NanoのNode-REDエディタにアクセスして遠隔でのサーボ制御が実現できました!
Jetson Nano を駆動できるモバイルバッテリを購入しました。
サーボも制御できるようになった!
最高の日曜日やで#nodeREDINIU モバイルバッテリー 軽量 10000mAh 3A高速出力搭載 を Amazon でチェック! https://t.co/Z2rdhYkDaB pic.twitter.com/aFBQ0R6QYR
— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2020
モータ制御
モータドライバを介してJetson Nanoでモータを制御しました。
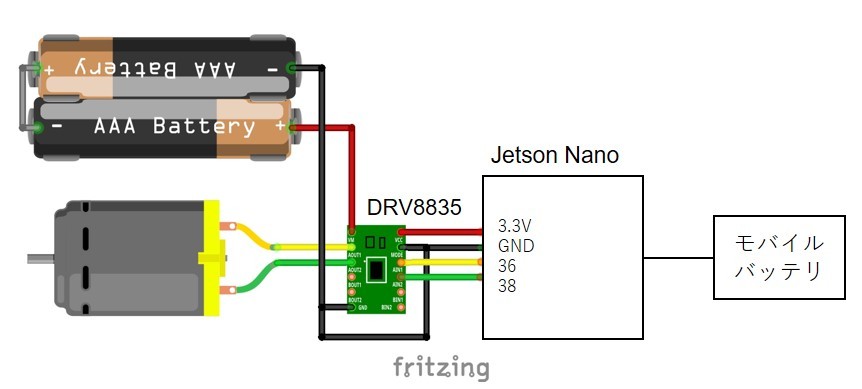
- モータドライバ DRV8835
- モバイルバッテリ

Node-RED
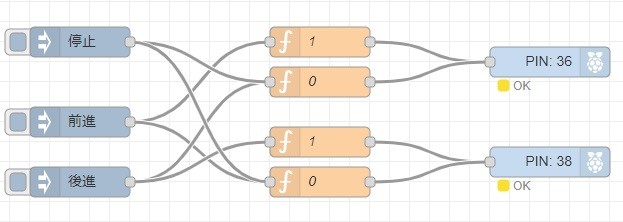
GPIO36、38のロジック出力を制御してモータの停止、前進、後進を制御します。
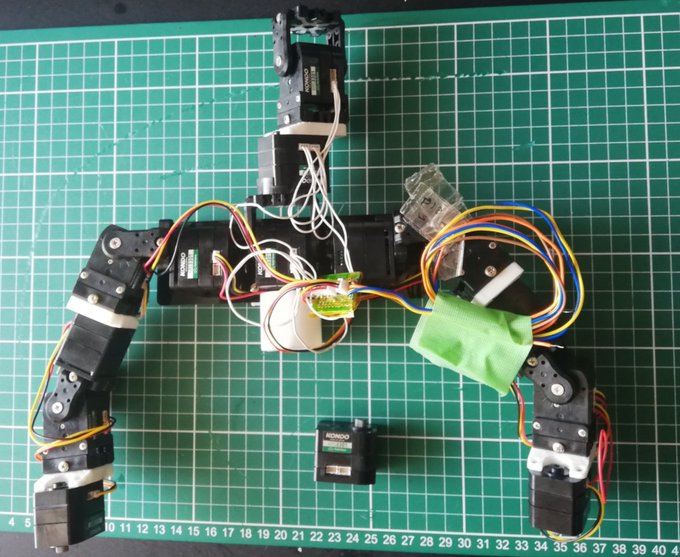
動作
俺もJetson Nanoでお掃除ロボット制御したかった
重いってよ。。。。#JetsonNano #nodeRED pic.twitter.com/vtvvR45DjG
— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2020
無念。。。
おわりに
非常にいいものをいただき本当にうれしいです。
次は機械学習や認識系を試したいです。
ところでこれなんて読むの?→Jetson





モバイルバッテリーについてお聞きしたいのですが、JetsonNanoに冷却ファンや入力機器を接続した状態でも正常に動作しますでしょうか?
申し訳ございません。
外部装置を付けての動作は確認したことがございません。