歩行検討2 -シリアルサーボと距離を詰めたい俺7-
前回からシリアルサーボ (KRS3301)を用いて製作した足ロボットの歩行の検討を始めました。
引き続き検討を行いましたので報告します。
目次
歩行検討
重心移動と足の移動の連動を実現し、より人間らしい歩行を目指しました。
前回の検討結果が以下です。
歩行調整
なんかおかしい pic.twitter.com/vKqm7FRQyk
— HomeMadeGarbage (@H0meMadeGarbage) January 10, 2022
以下のように連動動作させてみたのですが、スケートを滑ってるような不自然な動作になってしまいました。
- 重心右移動&左足上前に移動&右足まっすぐ
- 重心中央に戻す&右足後ろ
- 重心左移動&右足上前に移動&左足まっすぐ
- 重心中央に戻す&左足後ろ
動作再検討
先の失敗を踏まえて、足の位置をさらに細かく指定して自然な動作を目指します。
ここで足の座標は以下のように定義しました。
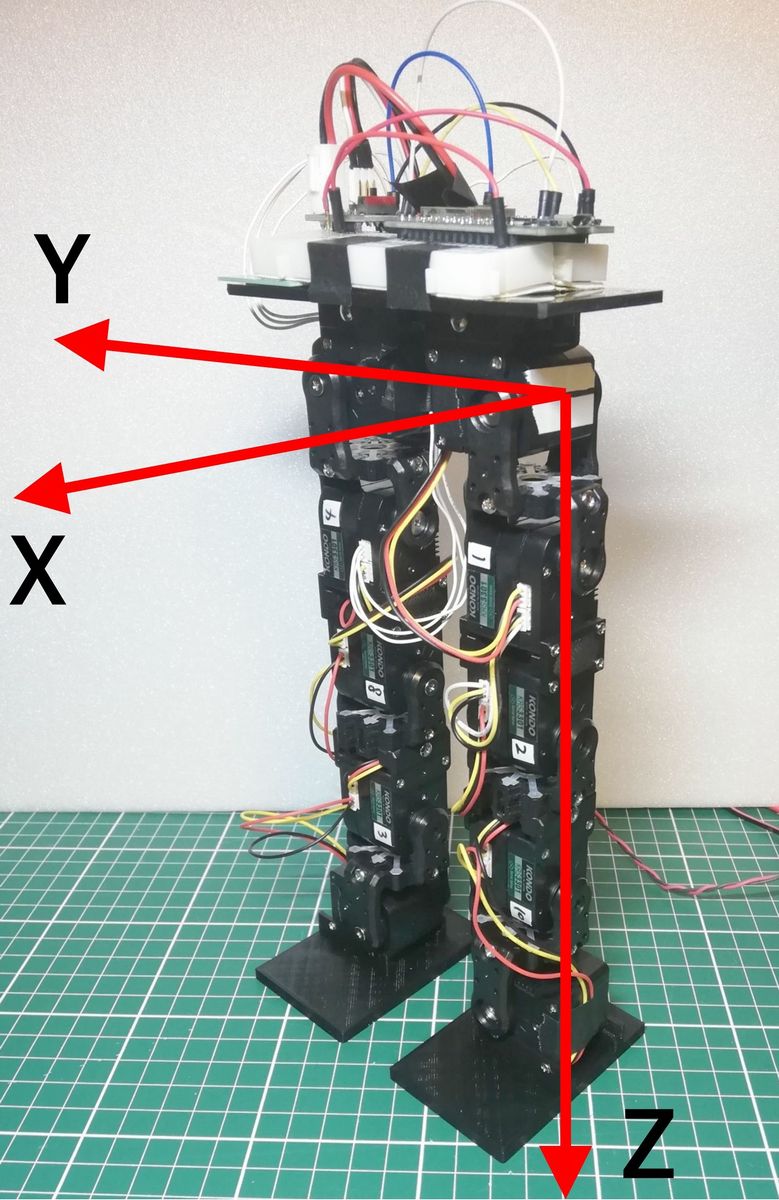
各足の付け根を原点として、直立時の足先の座標は(0, 0, 204mm)となります。
以下のように足を動かしてみました。

重心移動時 (Y軸) に足を上げて (Z軸) さらに足を前に出して他方は後ろに出して (X軸) 前進します。
上のように足上げや前後の座標を2点ではなく中間値を設けて自然な歩行を目指します。
また急な加速度がかからないように正弦波形で位置を各タームごとに制御します。
動作
T = 500msecで動作させてみました。
極力 急峻に動かないように
滑らかに制御 pic.twitter.com/PFhVhlXqu1— HomeMadeGarbage (@H0meMadeGarbage) January 12, 2022
だいぶ自然な歩行になってきたかなと思います。
おわりに
シリアルサーボによる足ロボットで歩行動作を楽しんできました。
かなり理解が深まると同時に2足歩行の難しさも痛感いたしました。
これ以上の動作を目指すにはIMUセンサや足裏センサで外乱や加速度の制御が必要になってくるかと思います。
ここではセンサの追加は実施しない予定でおります。
なぜなら私には そう
姿勢制御モジュール SHISEIGYOがついているのですから。