三角バランスロボット ーリアクションホイールへの道61ー
本記事にはアフィリエイト広告が含まれます。
先日Aliexpressをまさぐっておりましたらこんなのを見つけました。
【AliExpress】
うわっ これ¥12,000かよ すげーSHISEIGYO終了だな。。ちょっとSHOP整理しよ
SHISEIGYOのレシピ出したころは1軸で4, 5万してたのよ
しかも自立しなかったしhttps://t.co/WZDOPKBxLG pic.twitter.com/NJEzp5ZXX2— HomeMadeGarbage (@H0meMadeGarbage) October 29, 2023
リアクションホイールによるバランスロボットが凄く安く売っていたのよ。
しかも自立機構が面白い!なるほどなー
この方法なら低負荷で大きなトルクなくても立ち上がれますよね。
目次
やってみた
例のごとくこの自立機構を自身でも味わってみたくなったのでマネしてみた。
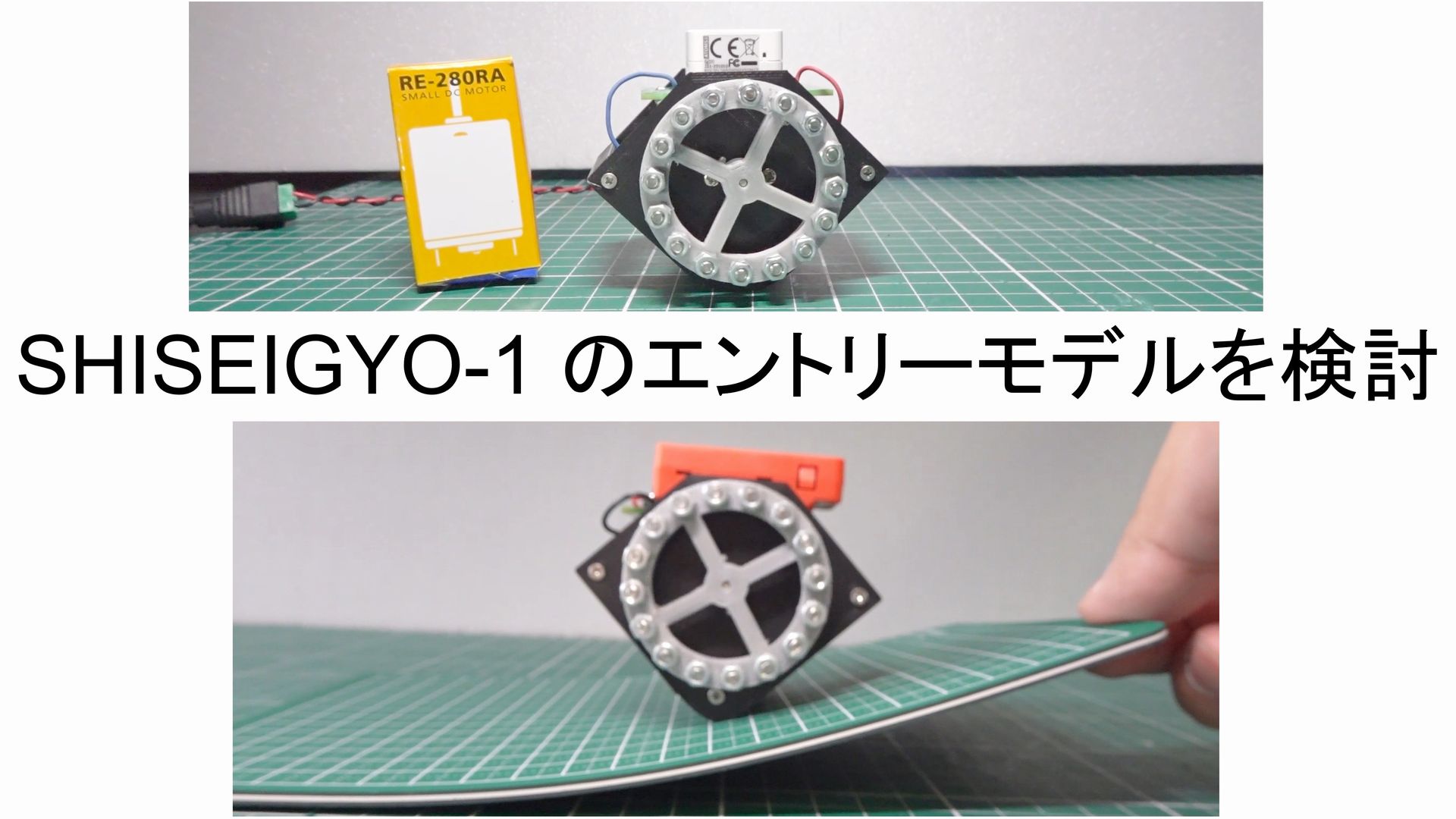
以前製作したマイコンにATOMS3を モータにRE-280RAを採用した SHISEIGYO-1 DC NEOをベースに製作を進めました。
三角形の筐体を製作してホイールを正転・逆転 を交互に動かしてみた。
またなんかしようとしてるね pic.twitter.com/2wPiv7CJOg
— HomeMadeGarbage (@H0meMadeGarbage) November 1, 2023
なんかいい感じで期待が持てました。
筐体の三角形の辺は弧を描いており、起き上がりやすさの助けになっています。
こういうのをルーローの三角形と言うらしいです。

起き上がり実現に向けて
筐体も完成して可能性も感じたので、起き上がり実現に向けて本腰を入れることとします。
正転・反転の回転速度と切り替え周期時間を調整しながら起上り動作の確認をしました。
ちくしょーめ pic.twitter.com/tGo5NlBINd
— HomeMadeGarbage (@H0meMadeGarbage) November 1, 2023
無事に起き上がりは実現できましたが上部が重いためにひっくり返ってしまいました。
下部にナットを貼り付けて、機体バランスを調整したところ。。
下重くしたらできた pic.twitter.com/ZIheAhJqqg
— HomeMadeGarbage (@H0meMadeGarbage) November 1, 2023
できた!
正転・反転を周期的に繰り返して、機体角度が直立に近づいた際に、バランス動作モードに切り替えています。
制御方法精査
無事に倒立動作を確認できたので、正転・反転の切り替えを周期時間指定ではなく、ATOMS3内蔵のIMUセンサで測定した角速度の正負で切り替えるように変更しました。
起き上がり時の正転・反転を定時での切り替えから 機体角速度の正負によって切り替えに変更
実にいい感じ pic.twitter.com/VVdJbXI7cr— HomeMadeGarbage (@H0meMadeGarbage) November 1, 2023
よりいい感じになった。
正転・反転の切り替えを自動化したことで精度が増しました。
滑り止め
機体の滑りを抑えるために下に敷いていた滑り止めシートを切って本体に貼り付けました。
滑り止めシートを側面に貼った pic.twitter.com/8vn9DddTEW
— HomeMadeGarbage (@H0meMadeGarbage) November 2, 2023
滑り止めシートはダイソーで買ったディズニーの商品(シリコン製かな?)です。
滑りにくくて薄くて加工しやすいので、もっと買っておけばよかったです。
本体へは瞬間接着剤で張り付けました。

構成吟味
筐体をルーローの三角形にすることで、大きなトルクなしでも自立動作が可能であることが分かったので他のマイコンやモータでの動作も確認してみました。
M5StackC Plusとミニ四駆モータを使用した SHISEIGYO-1 DC Plus をベースに試してみました。
SHISEIGYO-1 DC Plus と同様にM5StackC Plus 内蔵のDCDCでモータ駆動して自立できれば便利かなと思ったのですが、ちょっと駆動能力が足りませんでした。
モータをRE-280RAに変更
やはり内蔵DCDCが苦しそう pic.twitter.com/yup9etx01p— HomeMadeGarbage (@H0meMadeGarbage) November 2, 2023
バッテリ内蔵
寄り道はあまりうまくいかなかったので、最初の構成に戻ってLiPoバッテリ駆動にしてみました。
無事に動作しました。
これでどこにでも持っていけるようになったわ。