2023年 SPRESENSE活用コンテスト への道④ ーBLE通信2ー
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2023 |12日目
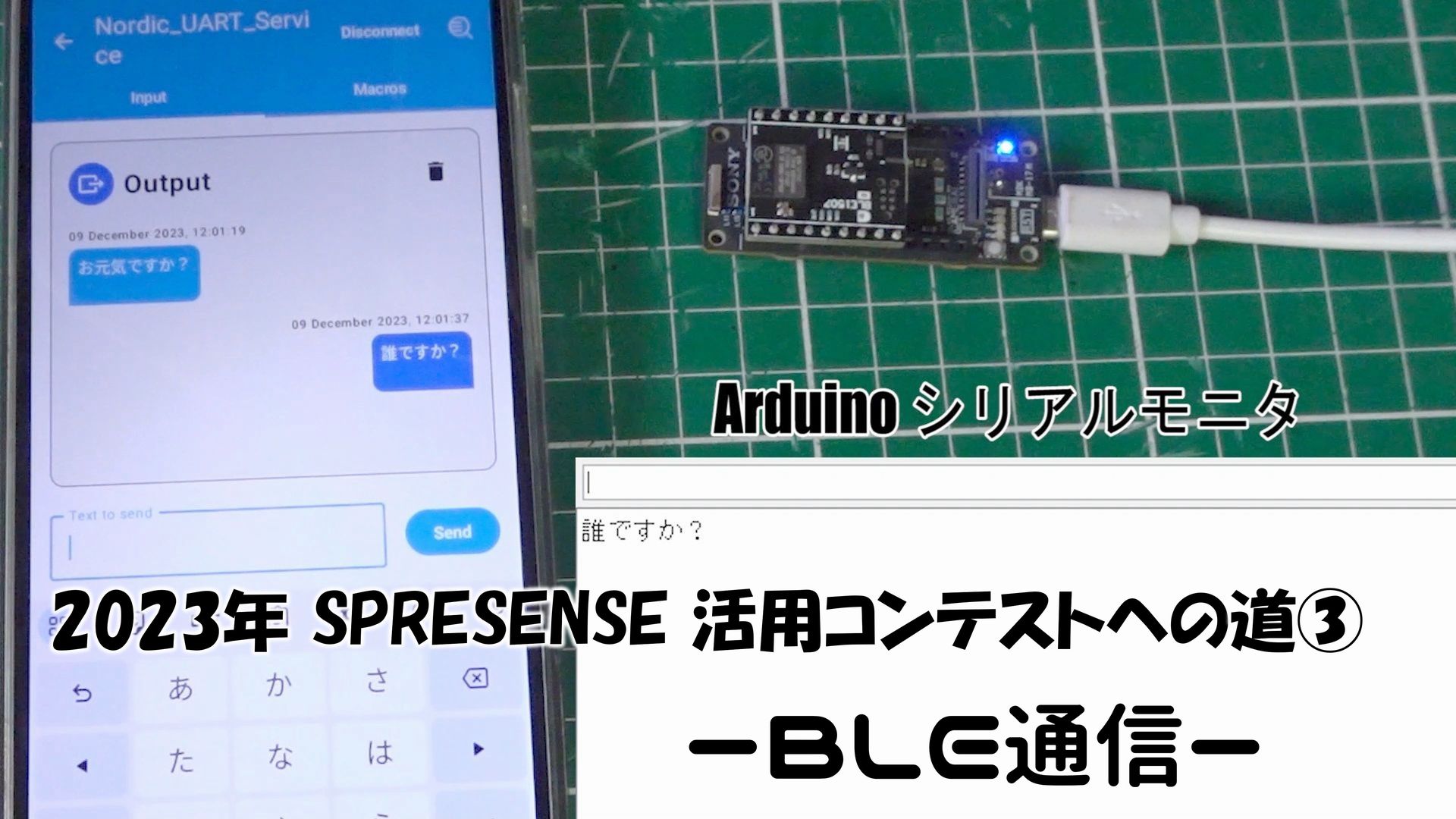
前回は 2023年 SPRESENSE活用コンテスト への応募用に各種サンプル部品を提供いただき、BLEボード BLE1507 を用いてスマホとの通信を確認しました。
目次
サーボ制御
ここではBLE通信でスマホから回転位置を指定して、サーボを制御したいと思います。
サーボは以前ソフトウェアシリアルでの動作を確認した STS3032 を使用します。
拡張ボード
サーボを駆動するために拡張ボードを使用します。
サーボはソフトウェアシリアルを用いて拡張ボードのGPIO D7ピンを使用して制御し、
BLEボード BLE1507はメインボードに載せてハードウェアシリアル (Serial2)でSPRESENSE間とデータ通信します。
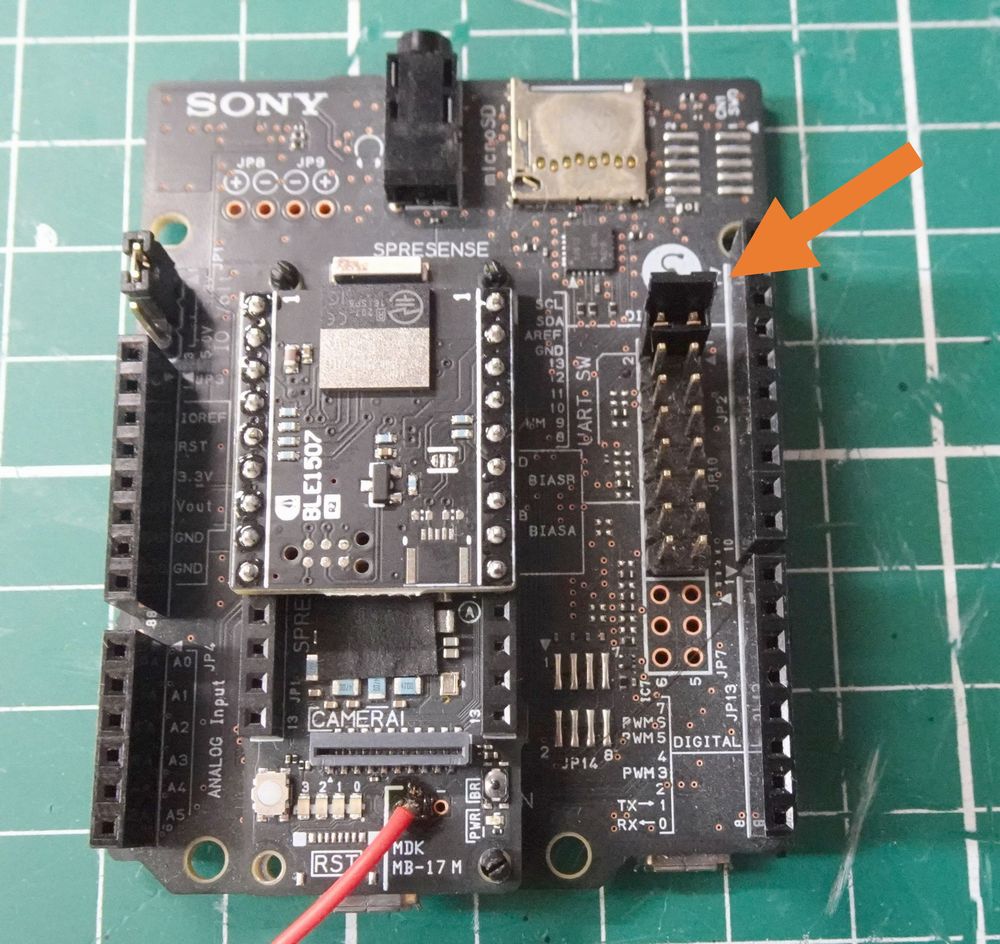
拡張ボードを接続してメインボードのUART Serial2を使用する際には、拡張ボードのJP10の1-2ピンにジャンパーピンでショートする必要があります。
動作
BLE通信でサーボ遠隔制御#SPRESENSE#HMGspresense2023 pic.twitter.com/KMW69TymMc
— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2023
スマホアプリ nRF Toolbox を使用してBLE通信で回転位置を文字データとして送信しています。
受信したデータをintに変換してサーボを動かしています。
実にIoT!

電源
ここではメインボードの外部電源用ピンに1セルLiPoバッテリ(3.7V)を接続して給電しています。
公式の電源系統図は以下のとおりです。
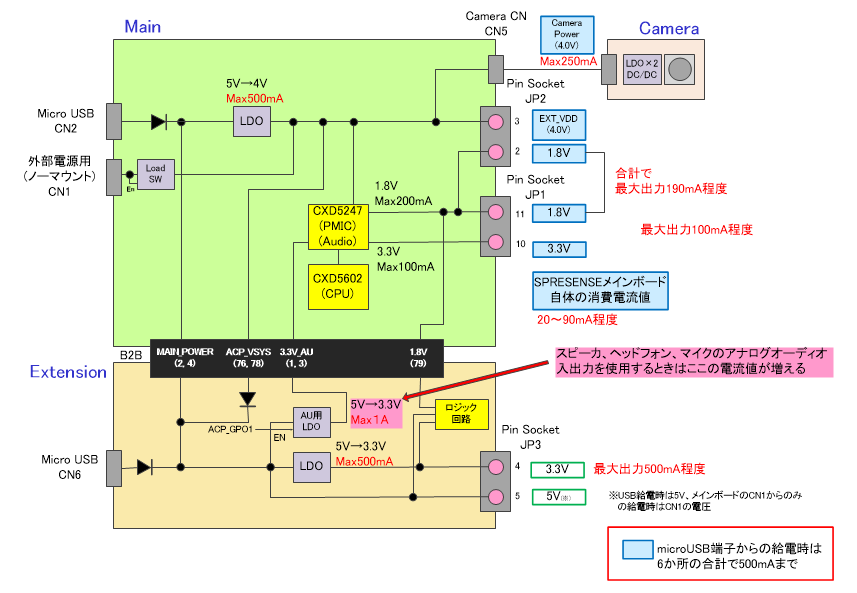
拡張ボードのVoutピン(上図では5V [JP3]と記載)に外部供給電圧が出力されます。
今回はサーボの電源としてこのピンを使用しています。
参考
おわりに
ここではBLE通信で遠隔サーボ動作を確認しました。
本連載で大きな障壁となるであろうと考えていた無線リアルタイム通信が実現でき、サーボ操作まで確認できました。
ここからはロボット製作に向けて調査・作業を進めていきます。