
robotics
ROBSTRIDE 05 倒立振子を強化学習で楽しむ3
前回はQDDモータ Robstride 05を用いた1輪倒立振子の倒立走行動作の強化学習を実施しました。 https://homemadegarbage.com/robstride-rl02 ゲームパッドのジョイスティック入力(走行速度)も観測ベクトルに組み込んで学習して実機でも見事に動作確認で...

ROBSTRIDE 05 倒立振子を強化学習で楽しむ2
前回は強化学習による Robstride 05 倒立振子の安定倒立動作を実現しました。 https://homemadegarbage.com/robstride-rl01 ここでは倒立振子の走行動作を強化学習で実現したいと思います。 走行は以下のようにゲームパッドのジョイスティックで速...

ROBSTRIDE 05 倒立振子を強化学習で楽しむ1
以前に制作したQDD Robstride 05 を用いた倒立振子を強化学習で楽しみたいと思います。 Robstride 05 倒立振子 pic.twitter.com/AhgOQN9DT1 — HomeMadeGarbage (@H0meMadeGarbage) February 23,...

クローラー倒立ボット MorphCrawlerBot
去年 (2025年) 完成させたクローラー倒立ボット MorphCrawlerBot を先日改修して 去年の連載記事に追記という形で記載したのですが、埋もれてもったいないので改めて粒だてたいと思います。 https://homemadegarbage.com/bldcservo10// &nb...
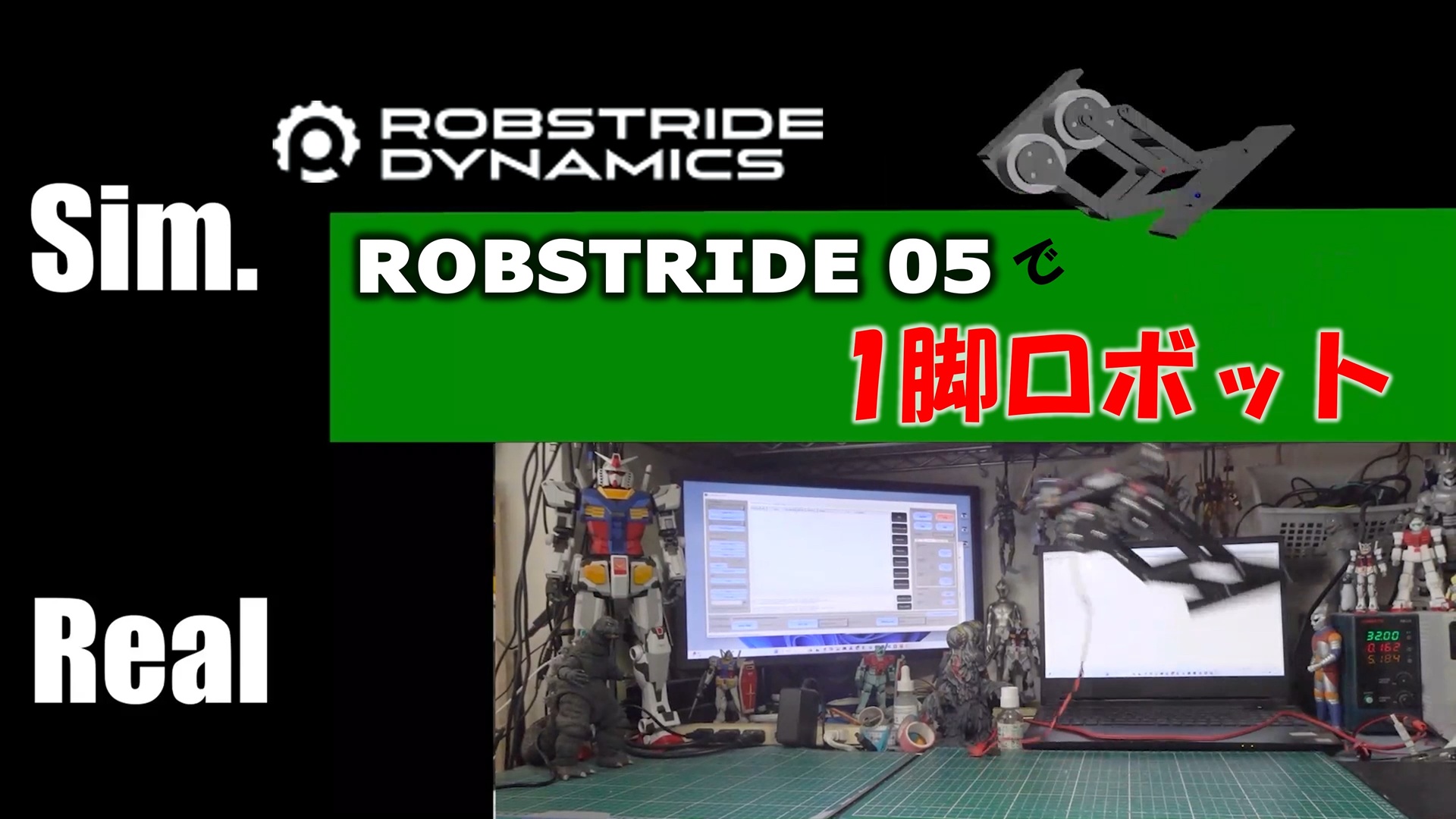
ROBSTRIDE 05 で1脚ロボット
以前 2個のRobStride 05 で1脚ロボを製作しました。 https://homemadegarbage.com/robstride04 ここではこの1脚ロボの動作を掘り下げてみました。 https://t.co/1KsNoXiFGT pic.twitter.com...
電子工作 2026.1.26 お父ちゃん ![]()

ROBSTRIDE 05 を買い足してみた
QDDモータ ROBSTRIDE 05を買い足しました。 今回はモータの詳細も理解するべくUSB-CANモジュールとのセットで購入いたしました。 2個の ROBSTRIDE 05での製作を楽しみつつ更に詳細調査実施しましたので報告させてください。 ...
電子工作 2025.12.24 お父ちゃん ![]()

予算3万円でつくる BLDC 2足歩行ロボット 第7号ー2足歩行ロボットのMJCF大公開ー
前回は2足歩行ロボット HM-01 の旋回、横移動、ジャンプ動作を楽しみ2足歩行ロボットを完成させました。 https://homemadegarbage.com/bldcrobo06/ ロボット製作と動作を一通り紹介できたので、ここではシミュレーション用の MJCF (MuJo...
電子工作 2025.10.10 お父ちゃん ![]()

予算3万円でつくる BLDC 2足歩行ロボット 第6号ー2足歩行ロボットの動作を楽しむ2ー
前回は2足歩行ロボット HM-01 の足踏み・歩行動作を楽しみました。 https://homemadegarbage.com/bldcrobo05 ここではさらに旋回、横移動、ジャンプ動作を追加して楽しみます。 ATOM用Arduinoコード 前回のAT...
電子工作 2025.10.3 お父ちゃん ![]()

予算3万円でつくる BLDC 2足歩行ロボット 第5号ー2足歩行ロボットの動作を楽しむ1ー
前回は2足歩行ロボット HM-01 を完成させて PS4コントローラによる足動作を楽しみました。 https://homemadegarbage.com/bldcrobo04 ここでは動作シーケンスを組んで足踏みや歩行動作を楽しみます。 ATOM用Ardui...
電子工作 2025.9.26 お父ちゃん ![]()

予算3万円でつくる BLDC 2足歩行ロボット 第4号ー2足歩行ロボット完成ー
前号では股関節ユニットを完成させて、機体傾きによる制御を楽しみました。 https://homemadegarbage.com/bldcrobo03 本号ではこれまでに製作した左足と股関節ユニットに加えて右足を追加製作してロボットを完成させます。 はじめに ...
電子工作 2025.9.19 お父ちゃん ![]()

予算3万円でつくる BLDC 2足歩行ロボット 第3号ー股関節を楽しむー
前号ではロボットの足を1本完成させて、IKによる制御を楽しみました。 https://homemadegarbage.com/bldcrobo02 本号ではロボの股関節を製作します。 はじめに ここからは股関節部の組み立てを手順通りに記載します。 外部コ...
電子工作 2025.9.12 お父ちゃん ![]()

予算3万円でつくる BLDC 2足歩行ロボット 第2号ー足のIKを楽しむー
前号では記念すべき創刊ということでSimpleFOCによるBLDC制御についてもろもろ紹介させていただきました。 https://homemadegarbage.com/bldcrobo01/ 本号ではロボットの左足となる足を1本完成させます。 足を上下前後に移動するための逆運...
電子工作 2025.9.5 お父ちゃん ![]()

予算3万円でつくる BLDC 2足歩行ロボット 創刊号ーSimpleFOCでBLDC動作を楽しむー
気軽に作れるブラシレスモータ(BLDC)による2足歩行ロボットを紹介したく、この度 本主題で創刊をさせていただきました。 近頃ドローン向けのBLDCが低価格で流通されるようになり、ギアで減速すればロボにも活用できることを確認しました。 卓上で楽しめるブラシレスモータによる2足歩行ロボットは大...
電子工作 2025.8.30 お父ちゃん ![]()

Unsuperior Mobility Vehicle プロジェクト2
私はRAI Institute社の UMV (Ultra Mobility Vehicle) の動作に大変驚き、強い憧れを抱きました。 すんごいよコレ In this demo, Ultra Mobile Vehicle (UMV) drives, turns, jumps, tricks,...
電子工作 2025.3.2 お父ちゃん ![]()
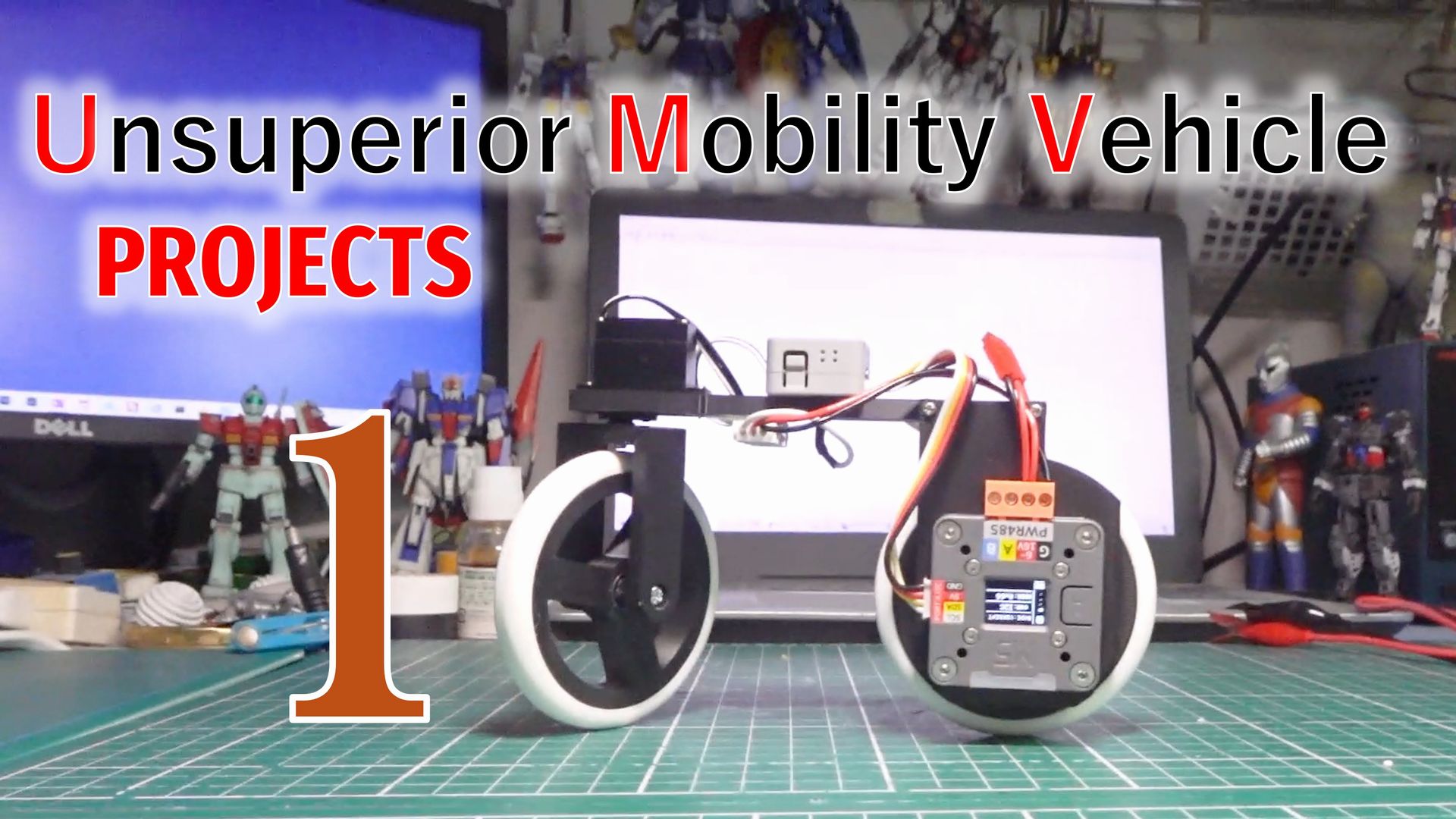
Unsuperior Mobility Vehicle プロジェクト1
先日凄いロボットをネット上で見かけました。 すごすぎるんですけど RAI Institute社が開発するUMV (Ultra Mobility Vehicle) です。 姿勢保持にフライホイールとか使っているわけではなくタイヤの駆動のみでバランスをとって停止・走行し、強烈なウェイトシフト...
電子工作 2025.2.23 お父ちゃん ![]()