Unsuperior Mobility Vehicle プロジェクト2
本記事にはアフィリエイト広告が含まれます。
私はRAI Institute社の UMV (Ultra Mobility Vehicle) の動作に大変驚き、強い憧れを抱きました。
すんごいよコレ
In this demo, Ultra Mobile Vehicle (UMV) drives, turns, jumps, tricks, and comes to a sudden stop called a track-stand. All of the driving, landings, balance, and track-stands are done using reinforcement learning. pic.twitter.com/p2tpOImVyY
— RAI Institute (@rai_inst) February 27, 2025
そして自分なりのUMV実現を目指して Unsuperior Mobility Vehicle プロジェクトを立ち上げてしまいました。
前回までに後輪制御による停止倒立動作まで確認することができました。
凄いやろ
こっから走行モードに移行させたりまた停止させたりしたいな
今の勘では難しそうな印象を受けている将来的にはウェイトシフト機構をのっけてジャンプもさせたいな
そうだこれを UMV (Unsuperior Mobility Vehicle) と名付けてプロジェクトとして育んでいこう。
課題も多いし勉強になるだろう pic.twitter.com/W1nKNBgK1D— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2025
引き続き各動作の確認を実施しましたので以下に記します。

目次
走行
走行について味見
走行テスト
当たり前だけどそれなりのスピードで走行させても安定せんね姿勢でステアリング制御かぁ なんかヤバそうな予感する pic.twitter.com/05ow68JRfI
— HomeMadeGarbage (@H0meMadeGarbage) February 24, 2025
ちょっと厳しそうだな。。。
バランスとってまっすぐ走らすにはもっとスピードが必要そうです。ちょっと卓上での試験はツラいなぁ。
機体傾きによってのステアリングも試しましたがこのサイズと重量ですとかなり高速の制御が求められます。
一旦保留
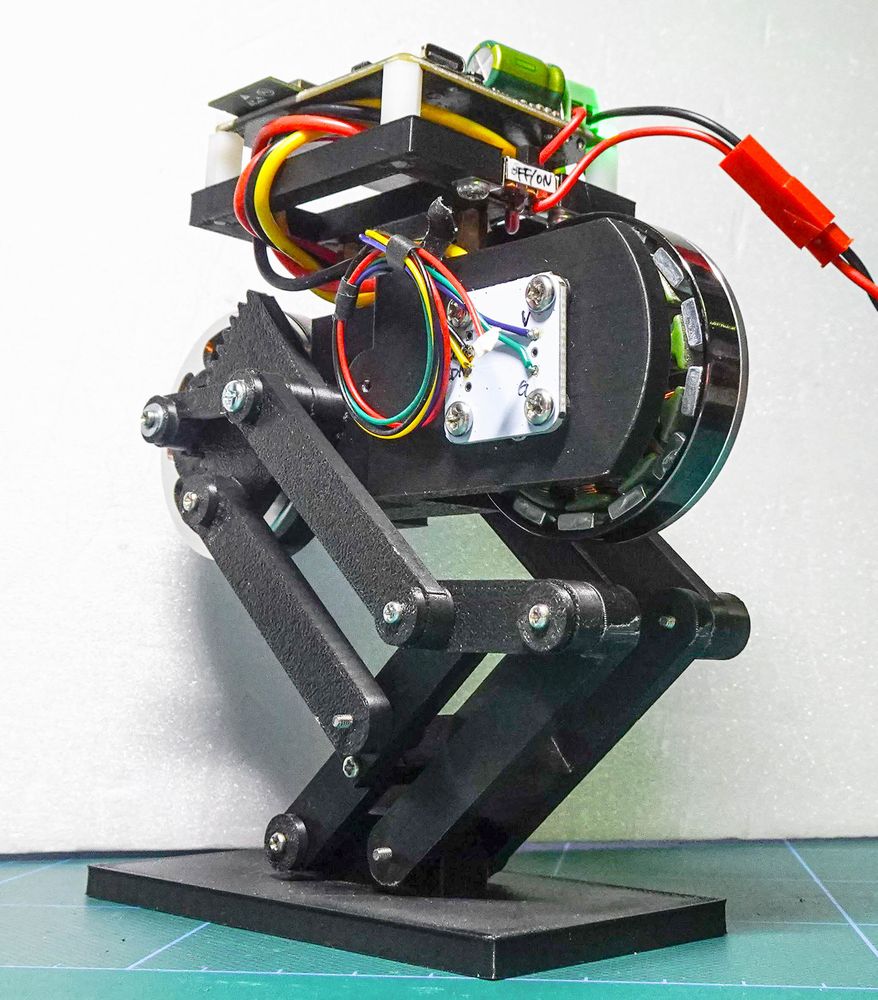
ウェイトシフト機構
2個のブラシレスモータとリンク機構によるウェイトシフト機構を製作しました。
ウェイトシフト機構 pic.twitter.com/8MFmGj1rTb
— HomeMadeGarbage (@H0meMadeGarbage) February 27, 2025
本家UMV (Ultra Mobility Vehicle) のウェイトシフト機構もブラシレスモータとリンク機構を使用していると思われます。

https://rai-inst.com/resources/videos/inside-the-institute-august-2024-sneak-peek/
4つのブラシレスモータ(おそらく1リンク2個で左右対称に駆動)でベルトを介してアームを動かしているようにみえます。
私のウェイトシフト機構もそれなりの駆動ができます。
ジャンガリアン pic.twitter.com/Pna1e1uI0i
— HomeMadeGarbage (@H0meMadeGarbage) February 27, 2025
試しに機体に載せてみた。ええ感じ
タイヤ滑り改善
タイヤはTPUフィラメントで出力したものを使用しているのですが、やや滑りグリップが良くない。。
以下のようにミゾめいたものを設けてみましたが。。
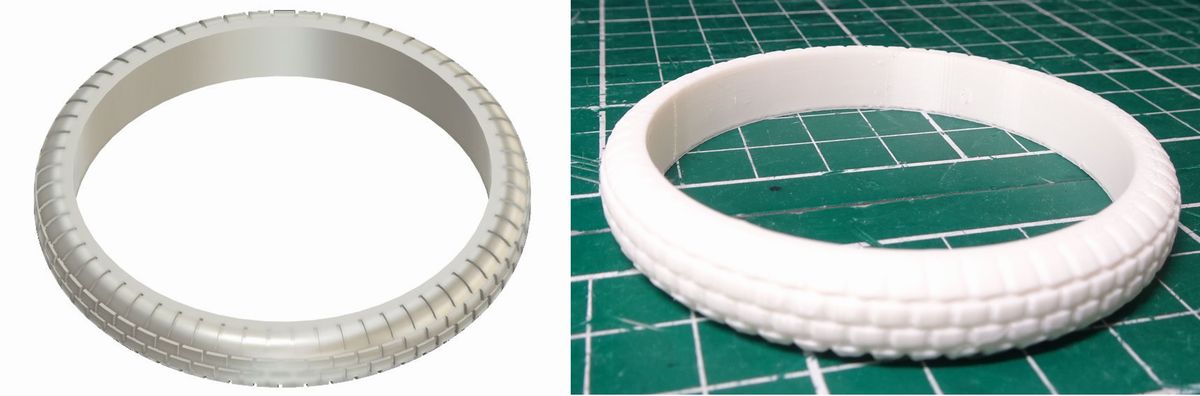
効果なし!
ダメだ滑る pic.twitter.com/m8Y4LDh1C6
— HomeMadeGarbage (@H0meMadeGarbage) February 25, 2025
キャスターカバー
滑ると止めにはゴムがよかろうと、キャリーバッグやスーツケース用のキャスター用のカバーを試しに購入してみました。

良く伸びていい感じにハマる
世の中にはキャリーバッグやスーツケース用のキャスターカバーというものがあるんだって pic.twitter.com/vZFvvfUiAF
— HomeMadeGarbage (@H0meMadeGarbage) February 28, 2025
お滑りも大きく改善されました。
あのころの自転車 pic.twitter.com/9a6aPRtskP
— HomeMadeGarbage (@H0meMadeGarbage) March 1, 2025
キャスターカバーいいなぁ
今後いろんなシーンで活用できそうだ。
おわりに
ここではUnsuperior Mobility Vehicle の各種動作の味見を実施しました。
ちょっと走行が厳しそうなので考えないといけません。
卓上のミニビークルでは走行姿勢制御はキツイかなぁ。。
サイズ・重量を大きくして制御ループ時間を長くしようとするとモータのトルクが必要になるのでゼロから再検討となりますし。。
すこし心を整えて再度挑みたいと思います。
追記
プロジェクト断念 (2025/3/3)
ちょっと走行が厳しそうなので一旦本プロジェクトを断念しようかと。。。
駆動するホイールをステアリングしての走行も検討したのですが、
駆動輪をステアリングしたほうが可能性ありそうだな
胸騒ぎがする
落ち着いて走行などのムーブを考えたい pic.twitter.com/ebQ3VtNGZD— HomeMadeGarbage (@H0meMadeGarbage) March 2, 2025
— HomeMadeGarbage (@H0meMadeGarbage) March 2, 2025
以下のようにステアリングしながらの蛇行走行でもとも思ったのですが、、
コレの応用で直進できないべか pic.twitter.com/vBkura7i2W
— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2025
なんかイマイチだよなぁ
これじゃあ普通に倒立振子つくってやればいいし
倒立振子にウェイトシフト機構つけてもあまり旨味なさそうだよねぇ・・
てことでプロジェクトはいったん断念
本気で走行検討するときはゼロから機体を考え直して広い実験場所も確保します。
ただ収穫はゼロではなく今回いい感じのウェイトシフト機構ができたのでコレをもう一度ロボットの足として考えてみようと思います。
以上、解散!!