月: 2020年8月
姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
前回ついにSHISEIGYO-1が完成いたしました。 ここからは当初の目的であった、以前製作したスマート靴占い装置への実装に向けて歩んでいきたいと思います。 靴を空中に投げた際にその地点の明日の天候データを受信し、リアクションホイールで靴の着地姿勢を制御したいのです。 1回目の リアクショ...
電子工作 2020.8.25 お父ちゃん ![]()
1軸 姿勢制御モジュール SHISEIGYO-1 完成 ーリアクションホイールへの道14ー
これまで歩んできたこの道ですが、ついに1軸 姿勢制御モジュール SHISEIGYO-1 (シセーギョーワン) が完成いたしました! 前回からの改善点とSHISEIGYO-1 の機能説明をさせていただきます。 滑りの改善 SHISEIGYO-1 は筐体を3Dプリンタ...
1軸 姿勢制御モジュール 起き上がり倒立の確立 ーリアクションホイールへの道13ー
前回は物理ブレーキの検証を行いましたが、物理強度が足りず私の心もろともへし折られ断念いたしました。 今回は本筋に戻り、物理ブレーキなしでの起き上がり倒立を目指します。 倒立精度の向上 リアクションホイールへの道11で制御パラメータを理論や物理で説明のつくものだけに...
電子工作 2020.8.22 お父ちゃん ![]()
1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
さて、リアクションホイールへの道10で物理ブレーキなしでの起き上がり倒立の手法を検証し、 リアクションホイールへの道11で制御パラメータを理論や物理で説明のつくものだけに整理して安定倒立を達成いたしました。 以上を組み合わせてSHISEIGYO-1の完成を目指したいところですが、 私の悪い癖。...
電子工作 2020.8.20 お父ちゃん ![]()
1軸 姿勢制御モジュール 倒立精度の向上 ーリアクションホイールへの道11ー
前回は起き上がり動作からの倒立の手法を模索し、 まだ成功確率は低いですが物理ブレーキなしでの起き上がり倒立の方法を確立できました。 ここでは リアクションホイールへの道7 で宿題となっておりました、 モータ制御のパラメータ整理と倒立精度の向上を目指しました。 制...
電子工作 2020.8.18 お父ちゃん ![]()
1軸 姿勢制御モジュール 起き上がりからの倒立 ーリアクションホイールへの道10ー
前回は 1軸 姿勢制御モジュール SHISEIGYO-1 の起き上がりを実現しました。 https://homemadegarbage.com/reactionwheel09 ここでは恐らく最終にして最難関であろう起き上がりからの倒立を目指します。 試行錯誤 起...
電子工作 2020.8.16 お父ちゃん ![]()

1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
さて前回までに SHISEIGYO-1 の倒立動作がそれなりに実現されましたので、 いよいよ起き上がりを試してみたいと思います。 起き上がり動作について JAXAの3軸 姿勢制御モジュール は下の動画の通り、起き上がって さらには点倒立までします。 ...
電子工作 2020.8.14 お父ちゃん ![]()
1軸 姿勢制御モジュール の改良 ーリアクションホイールへの道8ー
前回なんとか1軸 姿勢制御モジュール SHISEIGYO-1を倒立させることができました。 https://homemadegarbage.com/reactionwheel07 今回はいくつか改良を加えたので報告させていただきます。 LEDインジケータ 以前、...
電子工作 2020.8.13 お父ちゃん ![]()
1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
さて、前回の1軸 姿勢制御モジュール SHISEIGYO-1 (シセーギョーワン) 倒立に向けた下準備から随分日が経ちました。 実はずーーーーっと倒立させるべく試行錯誤しておりました。 この度無事になんとか倒立させることができましたのでご報告いたします。 倒立した...
電子工作 2020.8.9 お父ちゃん ![]()
1軸 姿勢制御モジュール の倒立に向けた準備 ーリアクションホイールへの道6ー
前回は1軸姿勢制御モジュールの筐体を製作し、簡単な動作確認を実施いたしました。 今回は姿勢制御モジュールの倒立実現に向けていくつか検討、改修を施したので 報告いたします。 エンコーダ導入 前回の動作確認段階でP制御では倒立しそうもないことは、体感的に理解できまし...
電子工作 2020.8.4 お父ちゃん ![]()
1軸 姿勢制御モジュール の筐体製作 ーリアクションホイールへの道5ー
前回はM5Stack ATOM Matrixと内蔵の慣性センサMPU6886でモータ制御するところまで確認いたしました。 ここでは1軸姿勢制御モジュールの筐体を作りこんで 簡単に動作確認を実施いたしました。 筐体製作 1軸姿勢制御モジュールの筐体を製作します。 筐体は3Dプリ...
電子工作 2020.8.3 お父ちゃん ![]()
ATOM Matrix の慣性センサでモータ制御 ーリアクションホイールへの道4ー
前回はM5Stack ATOM Matrixでカルマン・フィルタを用いた傾斜計を製作しました。 ここでは検出した姿勢角でブラシレスモータを制御して1軸の姿勢制御モジュールの実現への足掛かりにしたいと思います。 構成 ATOM MatrixのG26ピンで20kH...
電子工作 2020.8.2 お父ちゃん ![]()
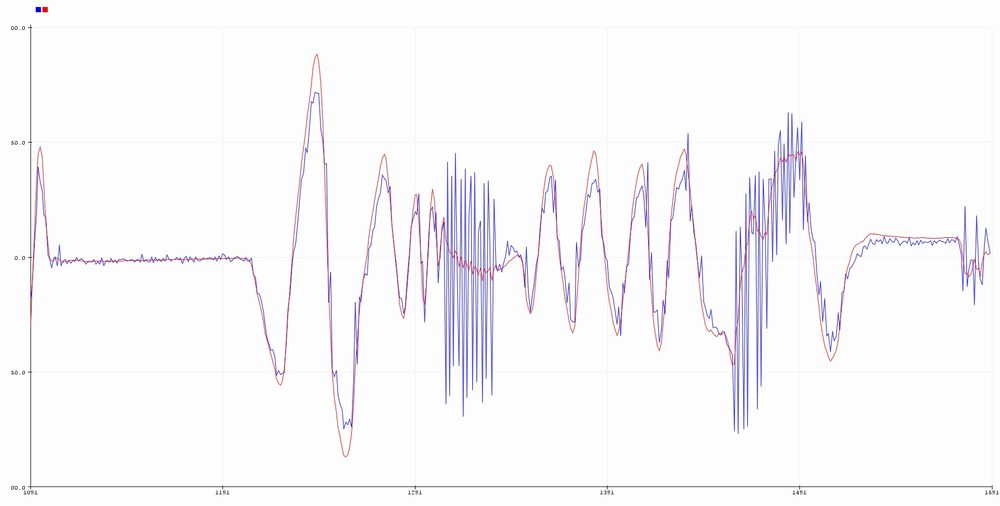
カルマン・フィルタで ATOM Matrix 傾斜計 ーリアクションホイールへの道3ー
これまではフライホイール付きブラシレスモータの制御について学習してまいりました。 ここでは1軸の姿勢制御モジュールの実現に向けて、カルマン・フィルタを用いて M5Stack ATOM Matrix に搭載された6軸慣性センサ MPU6886 で姿勢角を導出します。 6軸セン...
電子工作 2020.8.1 お父ちゃん ![]()