HuskyLens を MakeCodeで楽しむ
本記事にはアフィリエイト広告が含まれます。
前回、味見程度ではありますが HuskyLens の動作を楽しみました。
今回はHuskyLensの沼にもう少しだけ踏み込んでみようと思います。
目次
MakeCode
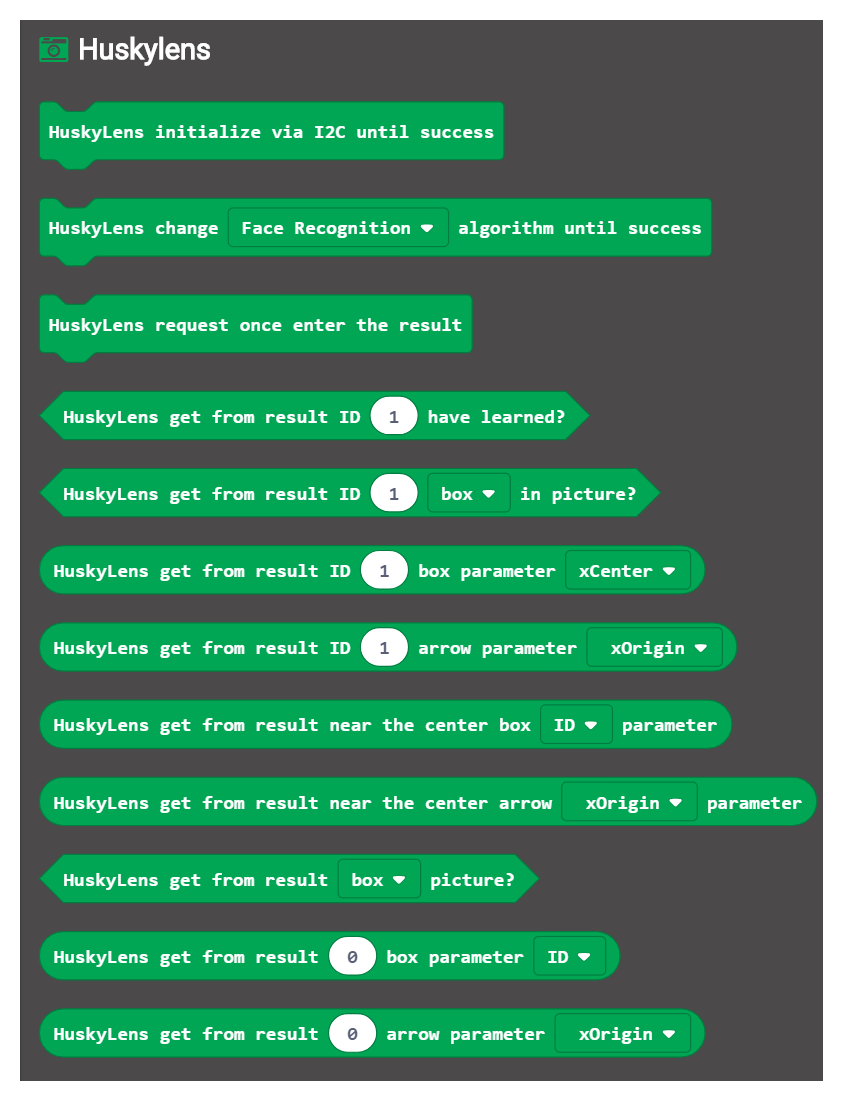
サヌキテックネットさんの記事でHuskyLensがMakeCodeでプログラミングできることがわかりました。

MakeCodeはブロックエディタやJavaScriptエディタでプログラムできるWebベースのコードエディタです。
https://www.microsoft.com/ja-jp/makecode
micro:bitやAdafruitのCircuit Playground Express というマイコンシリーズなどに対応しています。
前述の記事のとおりHuskyLensのブロックも用意されていますのでここでは、micro:bitと組み合わせて楽しみました。
めっちゃ便利!!
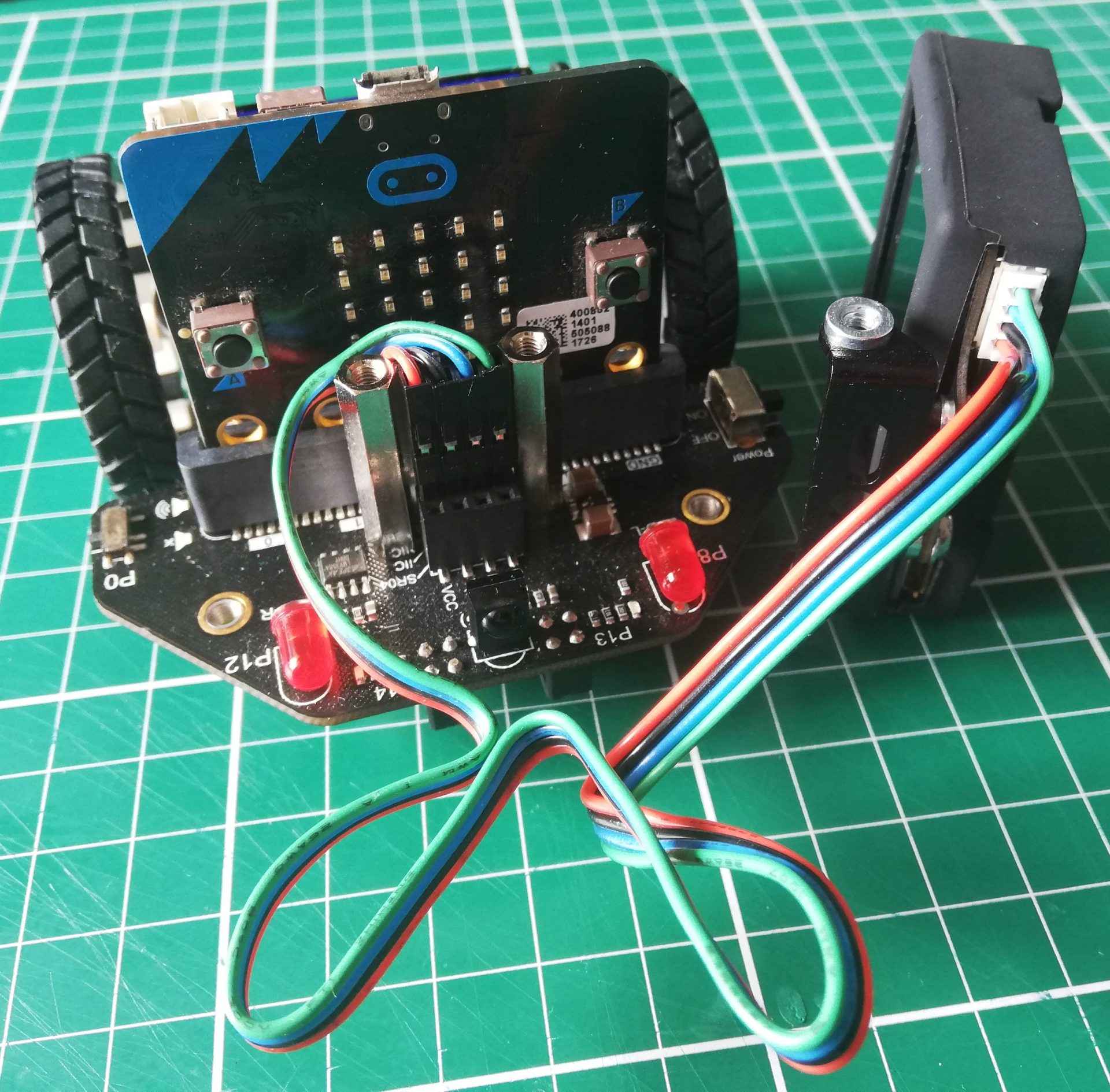
micro:bit(Maqueen)と連結
ここではmicro:bit用のロボットプラットフォームMaqueenとHuskyLensを連結して使用します。
付属の金具で可愛く実装できました♪
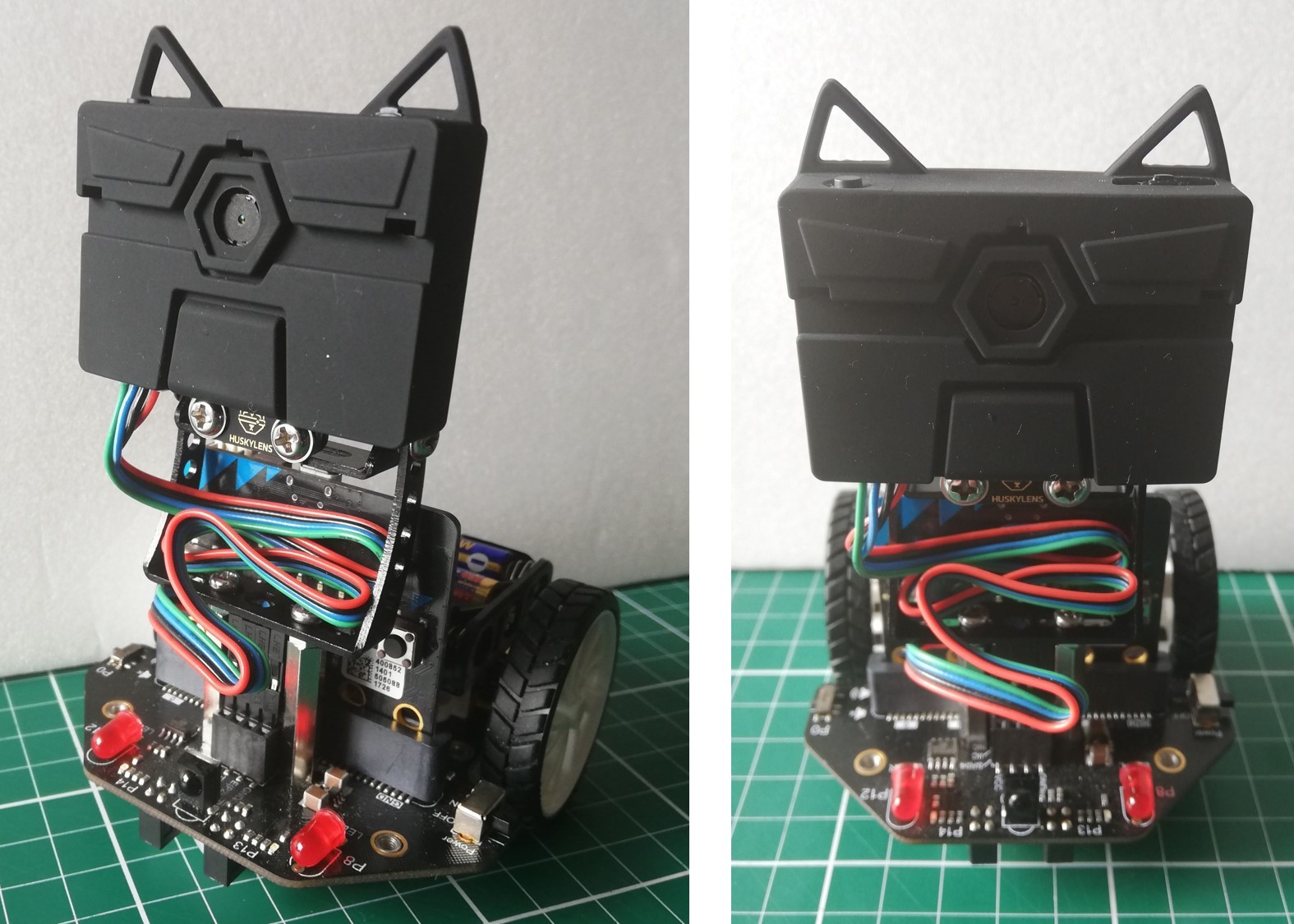
HuskyLensの4ピンコネクタとMaqueenのI2Cコネクタで結線します。

MakeCodeコーディング
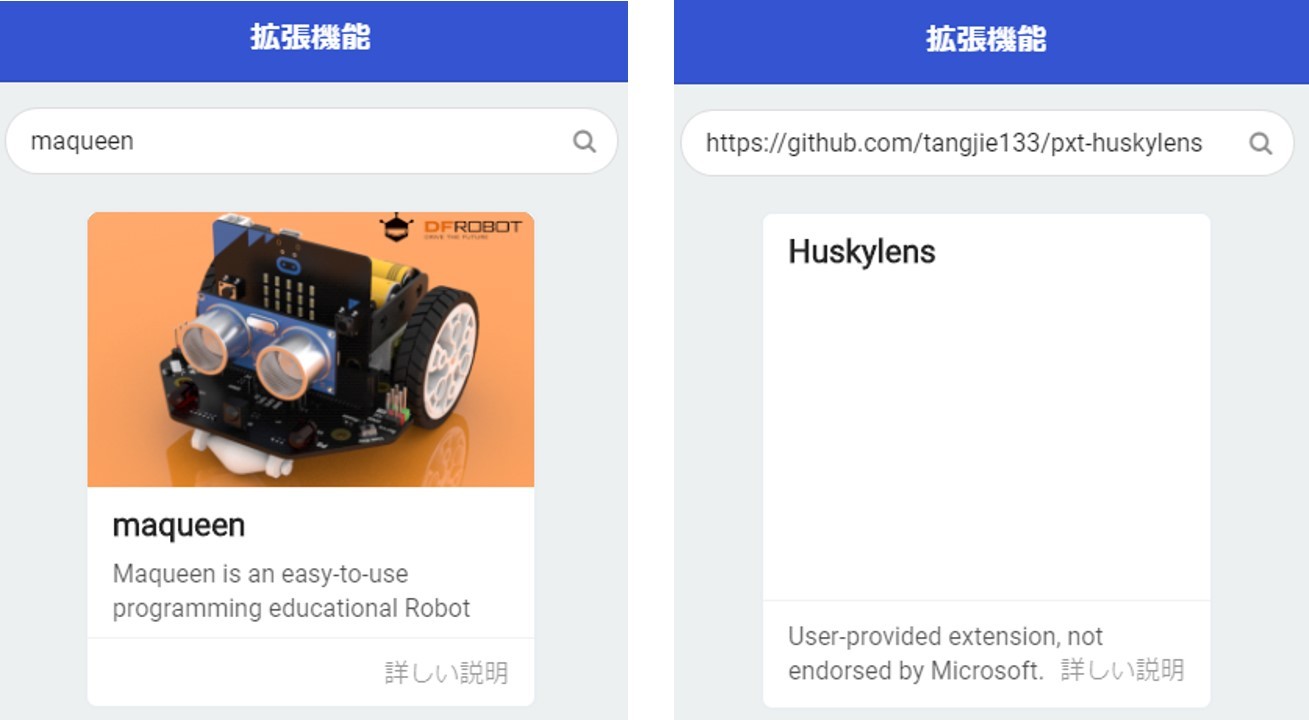
まずはMakeCodeにMaqueenとHuskyLensのブロックを追加します。
micro:bitのプロジェクトを起動して”高度なブロック” -> “拡張機能”で検索して追加します。
- Maqueen:Maqueenと検索
- HuskyLens:”https://github.com/tangjie133/pxt-huskylens”と入力し検索
物体追従 味見
学習した物体(HuskyLens君)を検出したら、右赤LEDを光らす。
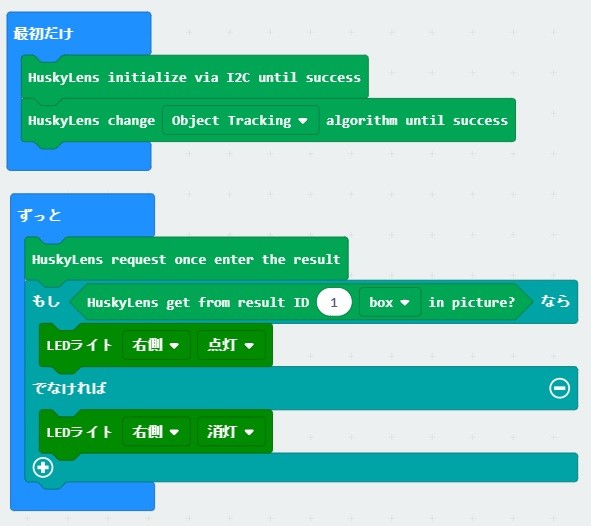
“最初だけ”でI2C通信と物体追従モードを確立させます。
“ずっと”で物体検出したら右赤LEDを点灯させてます。
簡単すぎる。。。
学習した物体(HuskyLens君)を検出したら
右赤LEDを光らすだけだけど。
MakeCodeで一瞬でできた。#DFRobot #MakeCode #HuskyLens#Maqueen #microbit pic.twitter.com/2MttKNudhD— HomeMadeGarbage (@H0meMadeGarbage) May 23, 2020
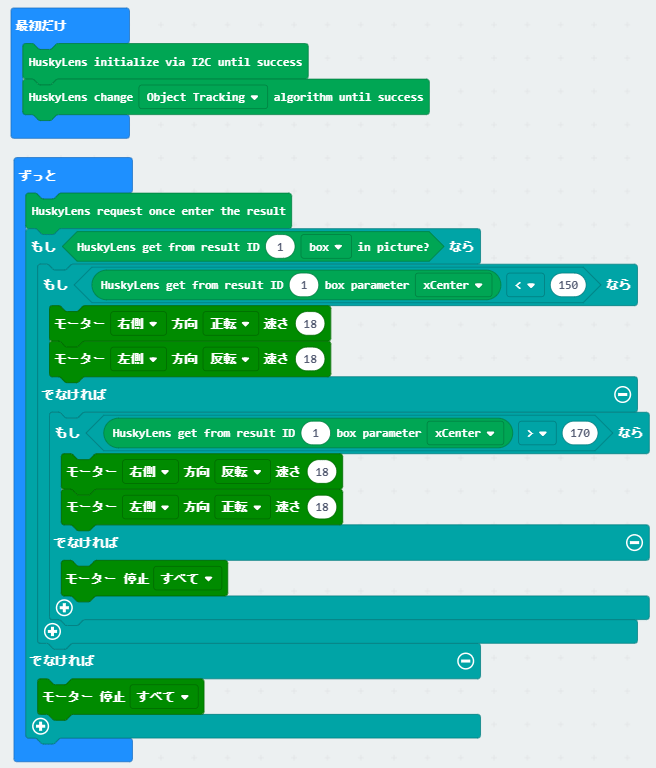
物体追従 モータ駆動
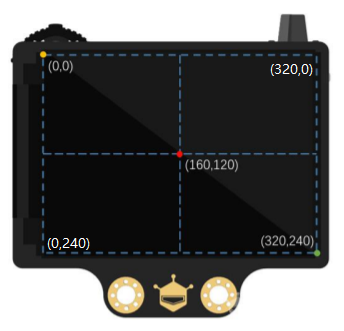
対象の物体がHuskyLensの画面の中央に来るようにモータを駆動し旋回する。
物体の中心座標がx軸の中心(160)付近からずれたらモータで旋回するようにしました。
物体追従なんとなく出来た pic.twitter.com/csXbkSSqcO
— HomeMadeGarbage (@H0meMadeGarbage) May 23, 2020
ちょっと制動が甘いですが。。。簡単にできてしましました。
モータ駆動はArduino IDEとかでまじめに制御したほうがよさそうです。
おわりに
HuskyLensのたぐいまれなるAI機能をI2C通信で気軽に利用することができました!
micro:bitと接続してMakeCodeで試せるのも簡単で魅力的ですね。
思い付きが簡単に実現できるので今後もいろいろ作ってみたいです。




tanosisou