micro:Maqueen Plus を堪能 – HuskyLens を 添えて –
本記事にはアフィリエイト広告が含まれます。
先日、DFRobot様より素敵な製品をいただきました!ありがとうございます!!

今回は micro:Maqueen Plus を楽しみましたので報告いたします。
目次
micro:Maqueen Plus
micro:Maqueen Plusはエンコーダ付きモータ2個と各種センサを搭載したプログラミングロボットです。
micro:bit用のスロットが搭載されており、Arduino IDE や MakeCodeなどでプログラミング可能です。
可愛い専用ボックスに入っており、超音波センサも同梱されています。

micro:Maqueen Plus の前機種の micro:Maqueen よりもサイズが大きく、ライントレース用のセンサの数も多くなっています。
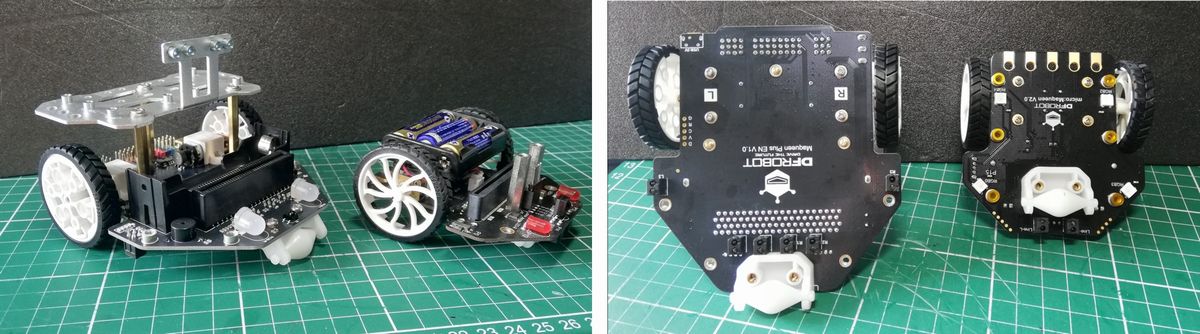
micro:Maqueen Plus は18650型バッテリで給電します。ここでは以下を購入し使用しました。
充電用のUSBマイクロ端子も実装されています。

動作
同梱されていた紙のライントレースコースを以下のサンプルMakeCode で走らせてみました。
https://makecode.microbit.org/54033-76373-09765-24488
【micro:Maqueen Plus】
リチウムイオンバッテリーをAmazonで購入してみました。安く入手できご満悦GOODGOODS 18650 リチウムイオン電池 3.7V 2600mAh PSE認証済み LDC-260H を Amazon でチェック! https://t.co/PUwpLZ1VlE
ライントレース pic.twitter.com/6FC2J0Lc7p
— HomeMadeGarbage (@H0meMadeGarbage) January 2, 2021
参考
HuskyLens との連携
前機種のmicro:MaqueenでもやったAIカメラの HuskyLens との連携動作を試してみました。
HuskyLensの色認識機能で金魚を認識してモータを制御して追従してみます。
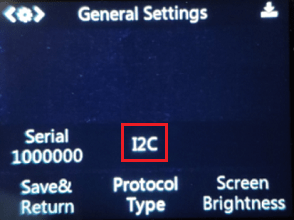
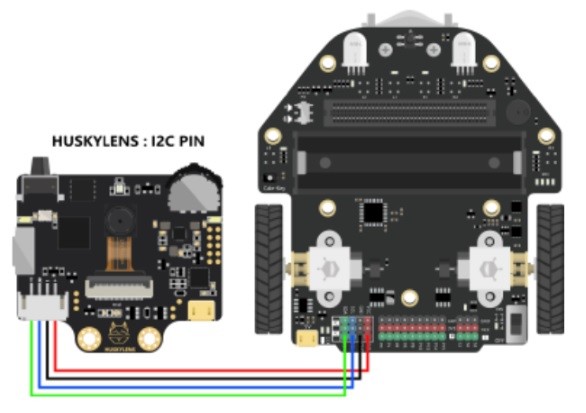
HuskyLensは設定でデータ出力を”I2C”にして、同梱の4線コネクタでmicro:Maqueen PlusのI2Cコネクタに接続します。
MakeCode
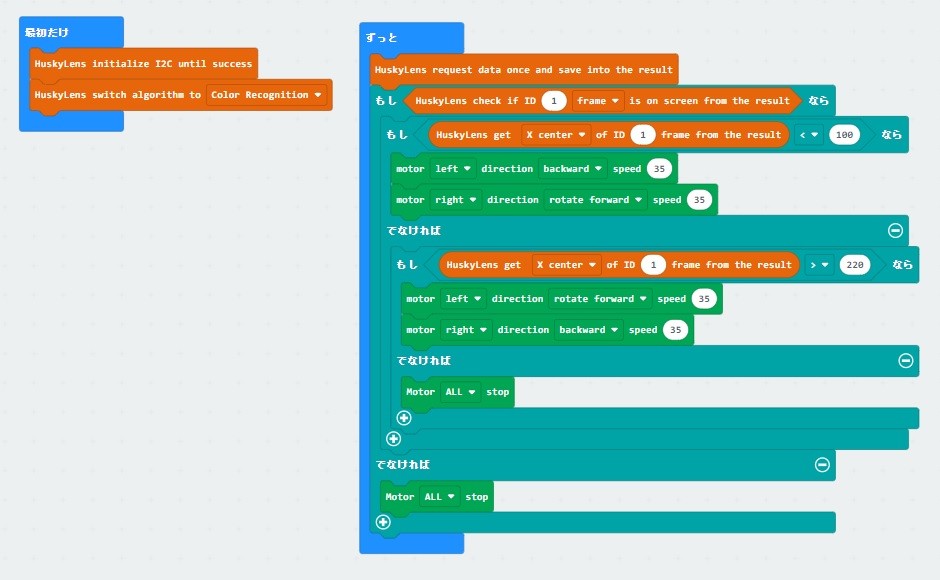
MakeCodeでプログラミングします。
MakeCodeはブロックエディタやJavaScriptエディタでプログラムできるWebベースのコードエディタです。
https://www.microsoft.com/ja-jp/makecode
micro:bitのプロジェクトを起動して ”高度なブロック” -> “拡張機能” で検索してMakeCodeにMaqueen plusとHuskyLensのブロックを追加します。

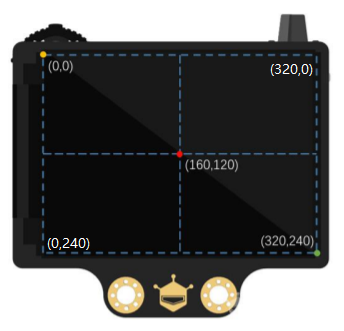
金魚の赤色がHuskyLensの画面の中央に来るようにモータを駆動し旋回する。
物体の中心座標がx軸の中心(160)付近からずれたらモータで旋回するようにしました。
動作