SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
本記事にはアフィリエイト広告が含まれます。
これまで2機種のリアクションホイールによってバランスする2足歩行ロボットを製作してきました。
初代のSHISEIGYO-1 Walker は歩行には成功しましたが使用したシリアルサーボ(KRS3301)のトルクが十分でなく、重心が低くゆっくりとした動作となりました。
二代目のSHISEIGYO-1 Walker 弐 は高トルクのPWMサーボ (RDS3218) を採用し素早い動作が可能となりましたが、サーボの動作角度の精度が低く足を交差させる歩行は断念しました。
いつかは高トルクで高精度のサーボモータを入手し完全版のSHISEIGYO-1 Walker 参 を実現したいと考えておりました。
近藤科学のシリアルサーボではKRS2572が高トルクであり、恐らく精度も高いと思われます。
但し、非常に高額です。。。
SHISEIGYO-1 Walker 参 の実現はしばらく難しいと考えておりました。
しかし先日 高トルクで低額のシリアルサーボを見つけましたので、ここではそのサーボの精度を検証してみましたので報告いたします。
目次
シリアルサーボ LX-224
以下のシリアルサーボ LX-244を購入しました。トルクも十分で価格もPWMサーボと変わらないです。

サイズはPWMサーボ RDS3218 と同じです。
LX-224 と RDS3218
クリソツ pic.twitter.com/vkwD9V2B96— HomeMadeGarbage (@H0meMadeGarbage) June 15, 2022
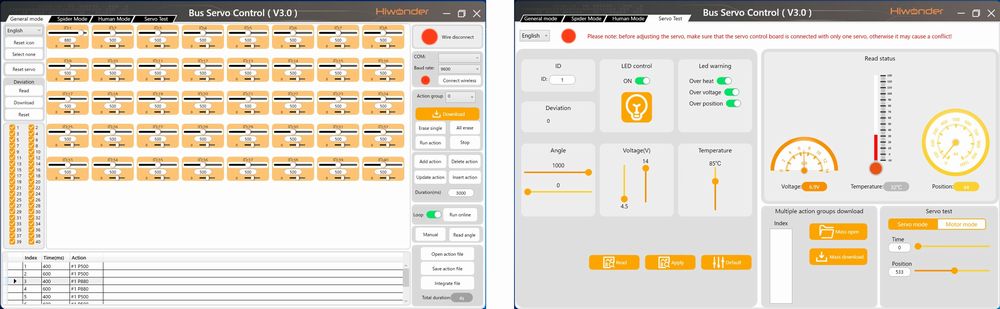
専用のコントローラも購入しました。

動作はコントローラと専用ソフトを使用して割と簡単にできました。サーボIDを割り当てたり、動作のシーケンスも組むことができました。
精度比較
LX-244の動作精度を PWMサーボ RDS3218 と比較してみました。
シリアルサーボ LX-244のほうは明らかに制動がかかっており精度もバッチリのようです。
上の実験ではLX-244の動作速度を最速で実施しているので若干オーバーシュート気味です。これは動作速度の調整で改善できそうです。
動作精度もさることながら各種パラメータを取得できることもシリアルサーボの魅力ですね。
片足構築
LX-244を3個使用して足を構築しました。
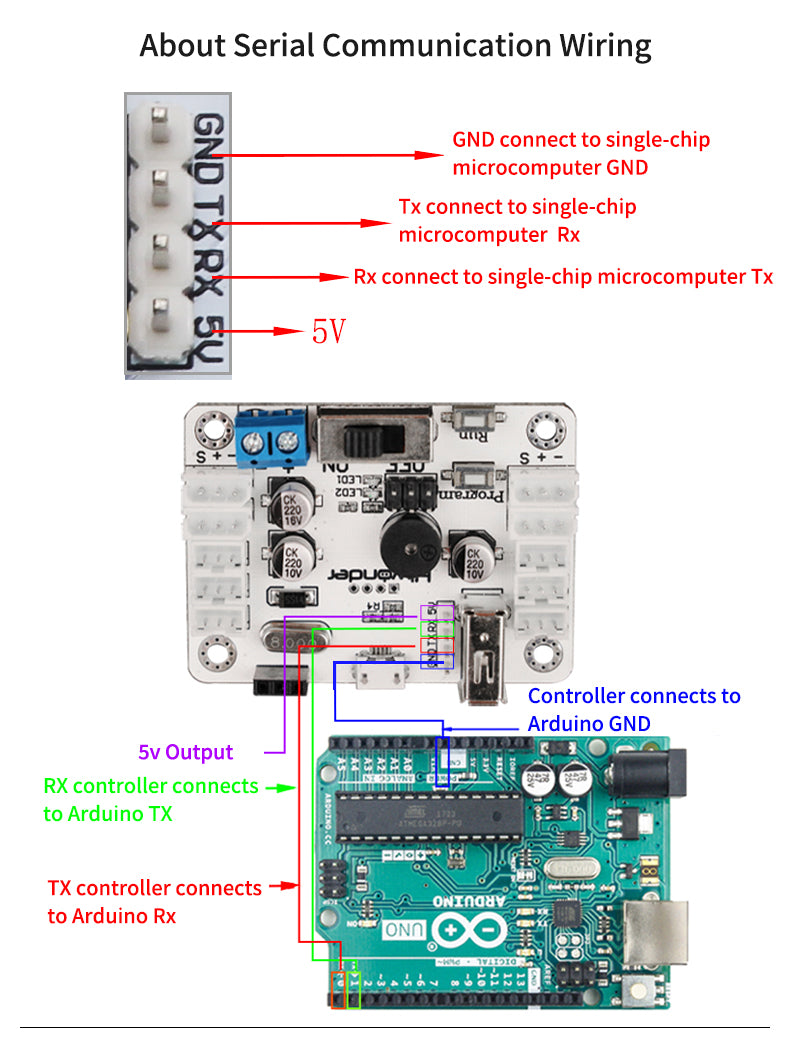
制御は専用コントローラにArduino UNOから信号を送って実施しました。
マイコンからの制御は以下を参考にしました。

屈伸動作
力強く割と滑らかな動作が実現されました。
コレはSHISEIGYO-1 Walker 参 の実現も夢ではないかもしれません。
引き続き検証進めます。
次の記事

関連記事
 SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
 SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
 SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
 SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
 SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー