ATOMS3 で姿勢制御モジュール ーリアクションホイールへの道53ー
本記事にはアフィリエイト広告が含まれます。
先日 ATOMS3 という製品がM5Stack社から発売されました。

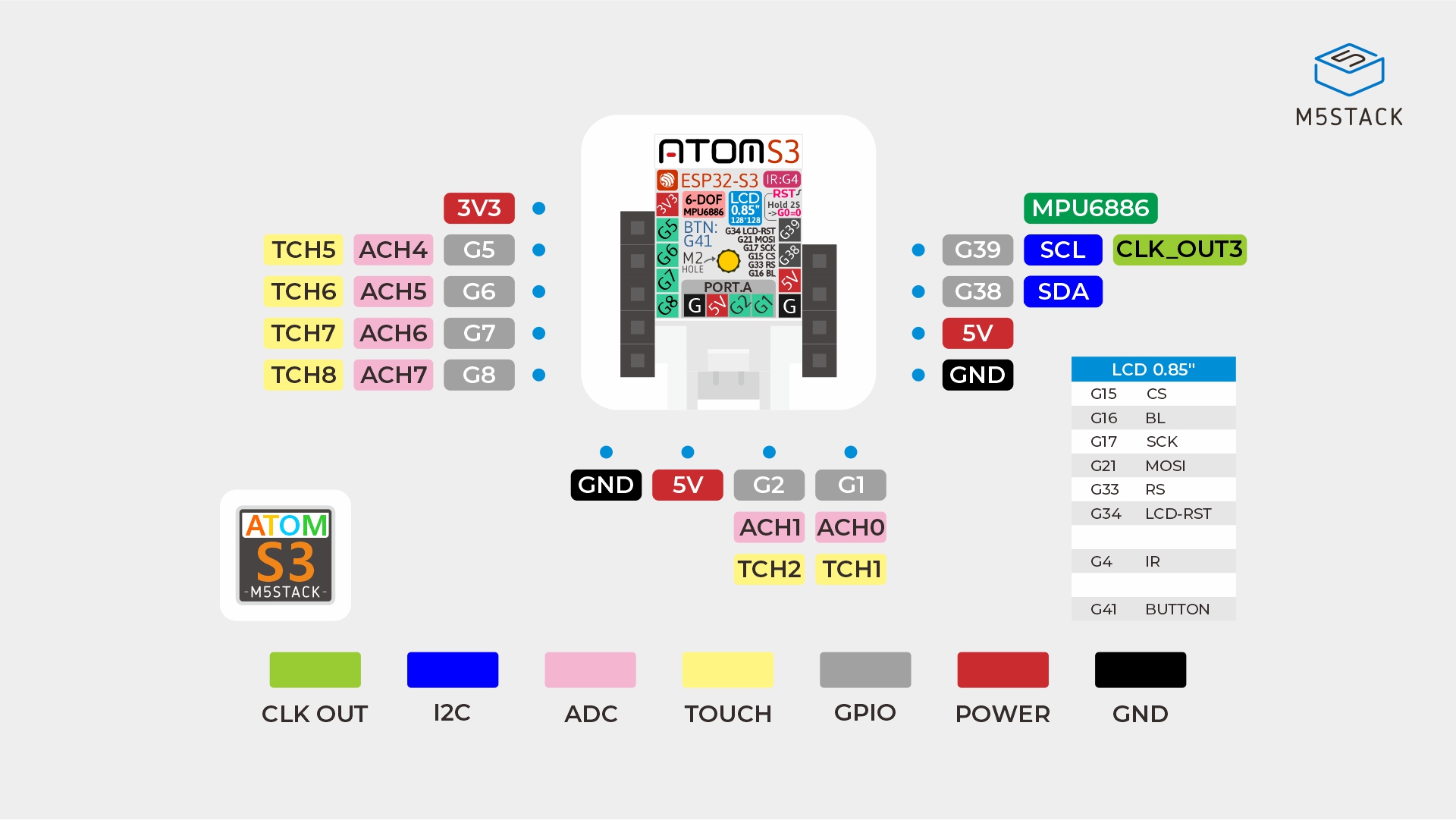
M5ATOM MatrixのLEDマトリクスがLCD (128×128ピクセル)に変更され、コントローラとしてESP32-S3が採用されています。
この度 ATOMS3 を入手し姿勢制御モジュールを製作しましたので報告させていただきます。
目次
ATOMS3
待ちわびた製品が到着。白くてカワイイ
ATOMS3
北海道なので少し遅れて到着
白くて綺麗 pic.twitter.com/ro1skDwpeV— HomeMadeGarbage (@H0meMadeGarbage) December 28, 2022
コントローラがESP32-S3に変わったのでピン番号が変わっていますが、電源・GNDやIMUのI2Cピンなど構成はMatrixと同様です。
姿勢制御モジュールで味見
試しにM5ATOM Matrix を使って製作したSHISEIGYO-1 Jr. をATOMS3で試してみました。
ATOMS3で姿勢制御モジュール
M5AtomS3.hが使えなかったのでSHISEIGYO-1 用に用意したMPU6886ライブラリで動作
IMU軸が変わっていた。ATOM MatrixはLED基板の裏に実装されていたけど、今回は恐らく本体基板に普通に実装されてる。
GPIOは番号変えるだけで動いた。
ディスプレイはまだ動かせていない pic.twitter.com/GmdPGw5cdM
— HomeMadeGarbage (@H0meMadeGarbage) December 28, 2022
ATOMS3のArduinoライブラリが用意されていましたが、この時点 (2022/12/28)ではコンパイルエラーで使用できませんでした。
ATOMS3ライブラリは使用せずにSHISEIGYO-1 Jr. のコードをそのまま使用し、対応するGPIOの番号を変えるのみで動作しました。
Arduino IDEでのボードは”ESP32S3 Dev Module”を選択。
ディスプレイはまだ駆動できていません。
もう1点 Matrixと比較してIMUセンサMPU6886の軸が異なっていました。
ATOM MatrixはLED基板の裏に実装されていましたが、ATOMS3は恐らく本体基板に普通に実装されてるようです (中みていないので確定ではないですが)。
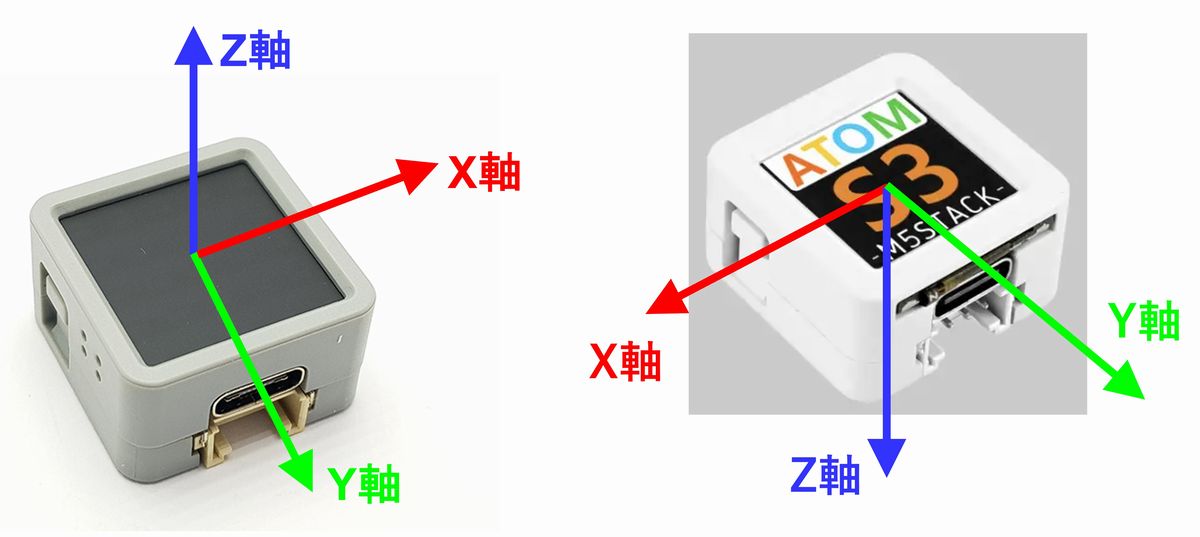
傾きを算出する際に注意が必要となります。
ディスプレイ表示
ATOMS3には128×128のLCDが搭載されております。ピンアサインはパッケージに記載があるのですがドライバが不明で良くわからず。。
しかも専用ライブラリは現状使えないので途方に暮れていたのですが、Twitter上でM5GFXライブラリで表示可能との情報を得ました。

早速 表示実験
スプライトとか必要かなと思ってたけど
普通の描画でもキレイにできた pic.twitter.com/NaUbDJ96J4— HomeMadeGarbage (@H0meMadeGarbage) December 28, 2022
M5GFXライブラリのおかげで何の設定もなしに簡単に表示できました。ありがたや。
小さいディスプレイですがコントラストも良く視野角も広くて素晴らしいです。
SHISEIGYO-1 Jr. S3
ディスプレイ表示ができるようになったので、姿勢制御モジュールを仕上げました。
SHISEIGYO-1 Jr. S3 爆誕
ということで ATOMS3 の白いボディに合わせて真っ白に仕上げてみました。
ディスプレイ表示もいい感じです♪
Arduino IDEコード
SHISEIGYO-1 Jr. のサンプルコードをベースにコーディングしました。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 |
#include "MPU6886.h" #include <Kalman.h> #include "FastLED.h" #include <WiFi.h> #include <WebServer.h> #include <Preferences.h> #include <M5GFX.h> M5GFX lcd; WebServer server(80); const char ssid[] = "SHISEIGYO-1 Jr."; // SSID const char pass[] = "password"; // password const IPAddress ip(192, 168, 22, 10); // IPアドレス const IPAddress subnet(255, 255, 255, 0); // サブネットマスク #define ENC_A 5 #define ENC_B 6 #define brake 7 #define rote_pin 1 #define PWM_pin 2 #define button 41 MPU6886 IMU; unsigned long oldTime = 0, loopTime, nowTime; float dt; volatile byte pos; volatile int enc_count = 0; float Kp = 1.8; float Kd = 2; float Kw = 0.4; float IDRS = 0.6; float getupRange = 0.1; float injectRatio = 14; int rotMaxL = 720; int rotMaxR = 790; int delayTime = 2; int pwmDuty; int GetUP = 0; int GetUpCnt = 0; float M; float Aj = 0.0; float accX = 0, accY = 0, accZ = 0; float gyroX = 0, gyroY = 0, gyroZ = 0; float temp = 0; float theta_acc = 0.0; float theta_dot = 0.0; Kalman kalmanY; float kalAngleY, kalAngleDotY; Preferences preferences; //加速度センサから傾きデータ取得 [deg] float get_theta_acc() { IMU.getAccelData(&accX,&accY,&accZ); //傾斜角導出 単位はdeg theta_acc = atan(-1.0 * accX / accZ) * 57.29578f; return theta_acc; } //Y軸 角速度取得 float get_gyro_data() { IMU.getGyroData(&gyroX,&gyroY,&gyroZ); theta_dot = gyroY; return theta_dot; } //起き上がり void getup(){ digitalWrite(brake, HIGH); int rotMax; //回転方向 if(kalAngleY < 0.0){ rotMax = rotMaxL; digitalWrite(rote_pin, LOW); GetUP = 1; }else{ rotMax = rotMaxR; digitalWrite(rote_pin, HIGH); GetUP = 2; } for(int i = 1023; i >= rotMax; i--){ ledcWrite(0, i); delay(5); } ledcWrite(0, rotMax); delay(300); if(kalAngleY > 0.0){ digitalWrite(rote_pin, LOW); }else{ digitalWrite(rote_pin, HIGH); } } //Core0 void display(void *pvParameters) { for (;;){ lcd.setTextFont(4); lcd.setCursor(10, 2); lcd.printf("%+05.1f", kalAngleY); int yy = map(kalAngleY, 20, -20, 0, 127); yy = constrain(yy, 0, 127); uint32_t colorY; if(fabs(kalAngleY) <= 1.0){ colorY = 0x00FF00U; }else if(fabs(kalAngleY) <= 15){ colorY = 0x0000FFU; }else{ colorY = 0xFF0000U; } lcd.fillRect(yy - 2, 25, 5, 128, colorY); delay(33); lcd.clear(); disableCore0WDT(); } } //ブラウザ表示 void handleRoot() { String temp ="<!DOCTYPE html> \n<html lang=\"ja\">"; temp +="<head>"; temp +="<meta charset=\"utf-8\">"; temp +="<title>SHISEIGYO-1 Jr.</title>"; temp +="<meta name=\"viewport\" content=\"width=device-width, initial-scale=1\">"; temp +="<style>"; temp +=".container{"; temp +=" max-width: 500px;"; temp +=" margin: auto;"; temp +=" text-align: center;"; temp +=" font-size: 1.2rem;"; temp +="}"; temp +="span,.pm{"; temp +=" display: inline-block;"; temp +=" border: 1px solid #ccc;"; temp +=" width: 50px;"; temp +=" height: 30px;"; temp +=" vertical-align: middle;"; temp +=" margin-bottom: 20px;"; temp +="}"; temp +="span{"; temp +=" width: 120px;"; temp +="}"; temp +="button{"; temp +=" width: 100px;"; temp +=" height: 40px;"; temp +=" font-weight: bold;"; temp +=" margin-bottom: 20px;"; temp +="}"; temp +="</style>"; temp +="</head>"; temp +="<body>"; temp +="<div class=\"container\">"; temp +="<h3>SHISEIGYO-1 Jr.</h3>"; //起き上がりボタン temp +="<button type=\"button\" ><a href=\"/GetUp\">GetUp</a></button><br>"; //Kp temp +="Kp<br>"; temp +="<a class=\"pm\" href=\"/KpM\">-</a>"; temp +="<span>" + String(Kp) + "</span>"; temp +="<a class=\"pm\" href=\"/KpP\">+</a><br>"; //Kd temp +="Kd<br>"; temp +="<a class=\"pm\" href=\"/KdM\">-</a>"; temp +="<span>" + String(Kd) + "</span>"; temp +="<a class=\"pm\" href=\"/KdP\">+</a><br>"; //Kw temp +="Kw<br>"; temp +="<a class=\"pm\" href=\"/KwM\">-</a>"; temp +="<span>" + String(Kw) + "</span>"; temp +="<a class=\"pm\" href=\"/KwP\">+</a><br>"; //Rot Max L temp +="Rot Max L<br>"; temp +="<a class=\"pm\" href=\"/rotMaxLm\">-</a>"; temp +="<span>" + String(rotMaxL) + "</span>"; temp +="<a class=\"pm\" href=\"/rotMaxLp\">+</a><br>"; //Rot Max R temp +="Rot Max R<br>"; temp +="<a class=\"pm\" href=\"/rotMaxRm\">-</a>"; temp +="<span>" + String(rotMaxR) + "</span>"; temp +="<a class=\"pm\" href=\"/rotMaxRp\">+</a><br>"; //IDRS temp +="IDRS<br>"; temp +="<a class=\"pm\" href=\"/IDRSm\">-</a>"; temp +="<span>" + String(IDRS) + "</span>"; temp +="<a class=\"pm\" href=\"/IDRSp\">+</a><br>"; temp +="</div>"; temp +="</body>"; server.send(200, "text/HTML", temp); } void handleGetUp() { handleRoot(); if(GetUP == 0){ getup(); } } void KpM() { if(Kp >= 0.1){ Kp -= 0.1; preferences.putFloat("Kp", Kp); } handleRoot(); } void KpP() { if(Kp <= 30){ Kp += 0.1; preferences.putFloat("Kp", Kp); } handleRoot(); } void KdM() { if(Kd >= 0.1){ Kd -= 0.1; preferences.putFloat("Kd", Kd); } handleRoot(); } void KdP() { if(Kd <= 30){ Kd += 0.1; preferences.putFloat("Kd", Kd); } handleRoot(); } void KwM() { if(Kw >= 0.1){ Kw -= 0.1; preferences.putFloat("Kw", Kw); } handleRoot(); } void KwP() { if(Kw <= 30){ Kw += 0.1; preferences.putFloat("Kw", Kw); } handleRoot(); } void handleRotMaxLm() { if(rotMaxL >= 10){ rotMaxL -= 10; preferences.putInt("rotMaxL", rotMaxL); } handleRoot(); } void handleRotMaxLp() { if(rotMaxL <= 1010){ rotMaxL += 10; preferences.putInt("rotMaxL", rotMaxL); } handleRoot(); } void handleRotMaxRm() { if(rotMaxR >= 10){ rotMaxR -= 10; preferences.putInt("rotMaxR", rotMaxR); } handleRoot(); } void handleRotMaxRp() { if(rotMaxR <= 1010){ rotMaxR += 10; preferences.putInt("rotMaxR", rotMaxR); } handleRoot(); } void IDRSm() { if(IDRS >= 0.1){ IDRS -= 0.1; preferences.putFloat("IDRS", IDRS); } handleRoot(); } void IDRSp() { if(IDRS <= 10){ IDRS += 0.1; preferences.putFloat("IDRS", IDRS); } handleRoot(); } void setup() { Serial.begin(115200); lcd.begin(); lcd.setTextColor(0xFFFFFFU, 0x000000U); //1つ目の引数が文字色、2つ目の引数が背景色 pinMode(ENC_A, INPUT); pinMode(ENC_B, INPUT); pinMode(brake, OUTPUT); pinMode(button, INPUT); attachInterrupt(ENC_A, ENC_READ, CHANGE); attachInterrupt(ENC_B, ENC_READ, CHANGE); IMU.Init(); //フルスケールレンジ IMU.SetAccelFsr(IMU.AFS_2G); IMU.SetGyroFsr(IMU.GFS_250DPS); kalmanY.setAngle(get_theta_acc()); ledcSetup(0, 20000, 10); ledcAttachPin(PWM_pin, 0); pinMode(rote_pin, OUTPUT); digitalWrite(brake, LOW); preferences.begin("parameter", false); //パラメータ初期値取得 rotMaxL = preferences.getInt("rotMaxL", rotMaxL); rotMaxR = preferences.getInt("rotMaxR", rotMaxR); Kp = preferences.getFloat("Kp", Kp); Kd = preferences.getFloat("Kd", Kd); Kw = preferences.getFloat("Kw", Kw); IDRS = preferences.getFloat("IDRS", IDRS); WiFi.softAP(ssid, pass); // SSIDとパスの設定 delay(100); // 追記:このdelayを入れないと失敗する場合がある WiFi.softAPConfig(ip, ip, subnet); // IPアドレス、ゲートウェイ、サブネットマスクの設定 IPAddress myIP = WiFi.softAPIP(); // WiFi.softAPIP()でWiFi起動 server.on("/", handleRoot); server.on("/GetUp", handleGetUp); server.on("/KpP", KpP); server.on("/KpM", KpM); server.on("/KdP", KdP); server.on("/KdM", KdM); server.on("/KwP", KwP); server.on("/KwM", KwM); server.on("/rotMaxLm", handleRotMaxLm); server.on("/rotMaxLp", handleRotMaxLp); server.on("/rotMaxRm", handleRotMaxRm); server.on("/rotMaxRp", handleRotMaxRp); server.on("/IDRSp", IDRSp); server.on("/IDRSm", IDRSm); server.begin(); //回転位置検出 タスク xTaskCreatePinnedToCore( display , "display" // A name just for humans , 4096 // This stack size can be checked & adjusted by reading the Stack Highwater , NULL , 1 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest. , NULL , 0); } void loop() { server.handleClient(); //オフセット再計算&起き上がり if (digitalRead(button) == 0){ getup(); } nowTime = micros(); loopTime = nowTime - oldTime; oldTime = nowTime; dt = (float)loopTime / 1000000.0; //sec //モータの角速度算出 float theta_dotWheel = -1.0 * float(enc_count) * 3.6 / dt; enc_count = 0; //カルマンフィルタ 姿勢 傾き kalAngleY = kalmanY.getAngle(get_theta_acc(), get_gyro_data(), dt); //カルマンフィルタ 姿勢 角速度 kalAngleDotY = kalmanY.getRate(); if(GetUP == 1 || GetUP == 2){ if(GetUP == 1 && kalAngleY >= getupRange){ digitalWrite(brake, LOW); GetUP = 99; }else if(GetUP == 2 && kalAngleY <= -getupRange){ digitalWrite(brake, LOW); GetUP = 99; }else{ if(GetUP == 1 && kalAngleY < 0 || GetUP == 2 && kalAngleY > 0){ ledcWrite(0, max(1023 - int(injectRatio * fabs(kalAngleY)), 0)); }else { ledcWrite(0,511); } } }else { if (fabs(kalAngleY) < 1 && GetUP == 0){ GetUP = 80; } /* Serial.print("Kp: "); Serial.print(Kp); Serial.print(", Kd: "); Serial.print(Kd,3); Serial.print(", Kw: "); Serial.print(Kw, 3); Serial.print(", kalAngleY: "); Serial.print(kalAngleY); */ if(GetUP == 99 || GetUP == 80){ //ブレーキ if(fabs(kalAngleY) > 15.0){ digitalWrite(brake, LOW); Aj = 0.0; GetUP = 0; }else{ digitalWrite(brake, HIGH); } //モータ回転 if(GetUP == 80){ M = Kp * kalAngleY / 90.0 + Kd * kalAngleDotY / 500.0 + Kw * theta_dotWheel / 20000.0; GetUpCnt++; if(GetUpCnt > 100){ GetUpCnt = 0; GetUP = 99; } }else{ Aj += IDRS * theta_dotWheel / 1000000.0; M = Kp * (kalAngleY + Aj) / 90.0 + Kd * kalAngleDotY / 500.0 + Kw * theta_dotWheel / 10000.0; } M = max(-1.0f, min(1.0f, M)); pwmDuty = 1023 * (1.0 - fabs(M)); //回転方向 if(M > 0.0){ digitalWrite(rote_pin, LOW); ledcWrite(0, pwmDuty); }else{ digitalWrite(rote_pin, HIGH); ledcWrite(0, pwmDuty); } } Serial.print(", loopTime: "); Serial.print((float)loopTime / 1000.0); delay(delayTime); Serial.println(""); } } //ブラシレスモータエンコーダ出力 割り込み処理 //参考:https://jumbleat.com/2016/12/17/encoder_1/ void ENC_READ() { byte cur = (!digitalRead(ENC_B) << 1) + !digitalRead(ENC_A); byte old = pos & B00000011; byte dir = (pos & B00110000) >> 4; if (cur == 3) cur = 2; else if (cur == 2) cur = 3; if (cur != old) { if (dir == 0) { if (cur == 1 || cur == 3) dir = cur; } else { if (cur == 0) { if (dir == 1 && old == 3) enc_count--; else if (dir == 3 && old == 1) enc_count++; dir = 0; } } bool rote = 0; if (cur == 3 && old == 0) rote = 0; else if (cur == 0 && old == 3) rote = 1; else if (cur > old) rote = 1; pos = (dir << 4) + (old << 2) + cur; } } |
ESP32-S3対応のためにGPIO番号を修正しています。
MPU6886.cppのI2Cピン番号も変更が必要です。 [ Wire1.begin(38,39,100000); ]
カルマンフィルタで誤差算出をするので、事前のIMUのオフセットの導出は必要ないことに気づいたので廃止しました。
ディスプレイはデュアルコアにしてcore0で表示させています。
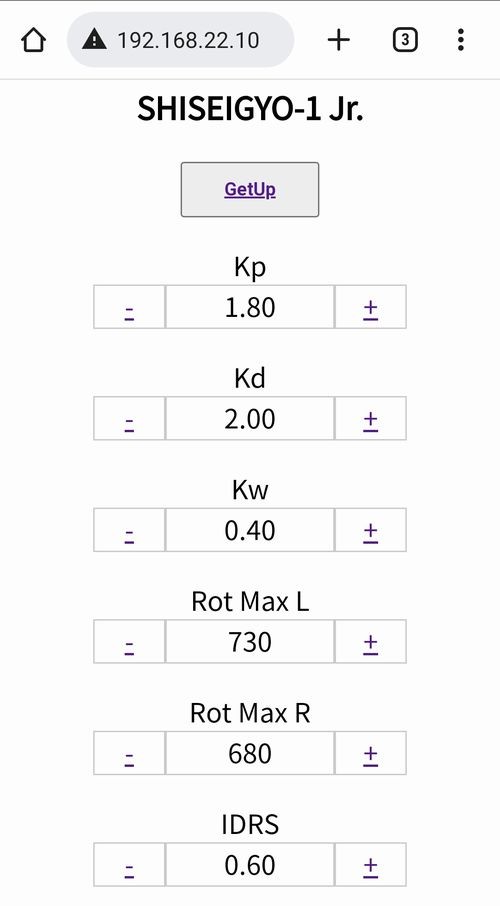
モジュールの各変数はAPモードでESP32-S3とつなげて、ブラウザから調整できるようにしています。
調整した値は電源OFF後もフラッシュで記憶されます。
起き上がり動作ボタンも実装しています。
コードでは “SHISEIGYO-1 Jr.” にWiFi接続して (パスワード:”password”)、192.168.22.10にブラウザアクセスで設定画面が表示されます。
おわりに
ATOMS3を用いて姿勢制御モジュールの製作を楽しみました。
小型ですがきれいなディスプレイもついて しかも低価格なのでATOMS3は非常におすすめの製品です。
まだライブラリが整ていないようで、ツギハギのコードになってしまいましたが動けばこっちのもんです。
しかしこれまでのSHISEIGYO-1 もATOM Matrixのライブラリが成熟する前に製作したので、今度どこかのタイミングで最新ライブラリでコードをきれいにまとめたいなぁなんて思っています。
次の記事