ブラシレスモータでサーボ1
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2024 |19日目
これまでシリアルサーボを関節に用いたロボットを各種楽しんできました。
シリアルサーボ STS3032 を関節に用いて以下の Wheeled Quadruped Robot を製作しました。
もうこれ以上の表現をシリアルサーボ関節ロボットに求めることはできないかなと限界も同時に感じております。

目次
凄いロボットをみた
軽い失意の中で以下のロボットをTwitter (現X)でみて、勇気をいただきました。
We’re excited to share this impressive project powered by ODrive!
“Milana”, designed by Helmut Buhler, is a two wheeled robot that can run, jump, pick up light objects, and balance. Check out the video below for a demonstration of its capabilities.
What will you build? #ODrive pic.twitter.com/hXw7wyuzmm
— ODrive Robotics (@ODriveRobotics) September 5, 2024
めちゃめちゃ元気にジャンプしてるし
よくよく見ると膝関節にブラシレスモータを使用している模様。
結構おおきいから高トルクのモータなのでしょう。
さらに高速制御で非常に高いジャンプを実現していますね。
これだ!!
ブラシレスモータ関節検討
高トルクブラシレスモータに手を出す前に (高いだろうし。。)、手持ちで大きめのモータで動作確認してみます。
ホントにブラシレスモータをサーボのように使えるのかを検討します。
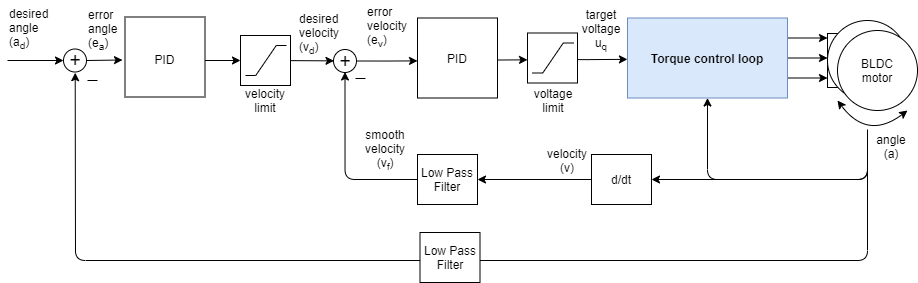
SimpleFOC
SimpleFOCのクローズドループ回転位置制御モードでサーボ動作の確認をしてみます。
モータとコントローラは以下を使用
・ブラシレスモータ 5010 360KV

・コントローラ

動作
結構いい感じ
ブラシレスモータでサーボってどうなんだろって思っていましたが、制御さえきっちりしておけば高速応答できるしええ感じですね。
もうサーボで豊かな動作表現の追及は卒業かな
限界っしょ https://t.co/skJSLgPaM4 pic.twitter.com/zYQqVEMSSe— HomeMadeGarbage (@H0meMadeGarbage) December 16, 2024
応答性の良さに非常に感動いたしました。
トルクに関しては巻き線や磁石などモータハード面と駆動電流で決まりますから、お金で解決していくことになりそうです。
足構築
手持ちのモータでトルクは十分とは言えませんが足を構築して動作確認を実施してみます。
冒頭の感動激ジャンプ倒立ロボットのようにギアを3Dプリントして足を動かしてみました。
あーこれ栄養たっぷり入ったやつだわ pic.twitter.com/YWLKPr9aP7
— HomeMadeGarbage (@H0meMadeGarbage) December 17, 2024
相変わらず応答良くて素晴らしい。
リンク機構で足構築
だいたい最初は暴れるよな pic.twitter.com/c9ZWb5L4r3
— HomeMadeGarbage (@H0meMadeGarbage) December 17, 2024
ちょっと暴れちゃってるけど、これはループの速度や角度のPID制御パラメータ調整で解決できます。
— HomeMadeGarbage (@H0meMadeGarbage) December 17, 2024
おわりに
ここではブラシレスモータによるサーボ動作を検証しました。
大変応答がよく感動しました。
本件で検証を進めてゆくゆくは高トルクのブラシレスモータ購入に踏み込みたいと思います。
直近では以下の検討を予定しています。
・別モータで動作確認
・クローズドループ→ベクトル制御検討
それではまた