シリアルリンク 2足歩行ロボットの製作9 ー Yaw軸検討 ー
本記事にはアフィリエイト広告が含まれます。
前回はセンシングによる半自動歩行動作の検証を楽しみました。
モータギアをチタン製にしたので壊れる心配もなく思う存分検証を進めることができました。
チタニウムを3Dプリントってどういうことなんだろうと思いつつ注文したけど出来は完璧だね。
早速ロボに導入して検討いたしましょう。#JLC3DP pic.twitter.com/hmX31fu2Ut
— HomeMadeGarbage (@H0meMadeGarbage) July 22, 2025
引き続きいろいろ検証進めたので報告させていただきます。

目次
Roll軸の再考
これまで片足4軸のシリアルリンク機構のロボットを検討してきました。
そんななかRoll軸のモータがさほど機能してないような気がしてきました。
試しにRoll軸モータの動作を止めてみたところ。。。
Roll軸補正止めて固定してみた
体幹のブレは大きくなるけど それなりに歩けるなRoll軸廃止してYaw軸にしちゃおうかしら
Yaw軸のおいじりほぼ経験ないから勉強になるかもね pic.twitter.com/whfLcO5CzR— HomeMadeGarbage (@H0meMadeGarbage) July 27, 2025
若干左右のブレは大きくなりますが、問題なく歩けてますね。
Roll軸モータはなくても問題なさそうかなぁ
Yaw軸の検討
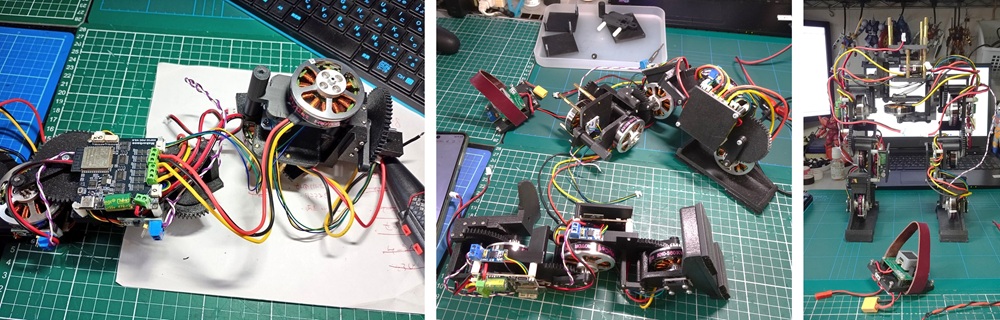
Roll軸モータがなくてもなんとかなりそうなことが分かったので、Roll軸部をYaw軸機構に改造して動作を検証しようと思い立ちました。
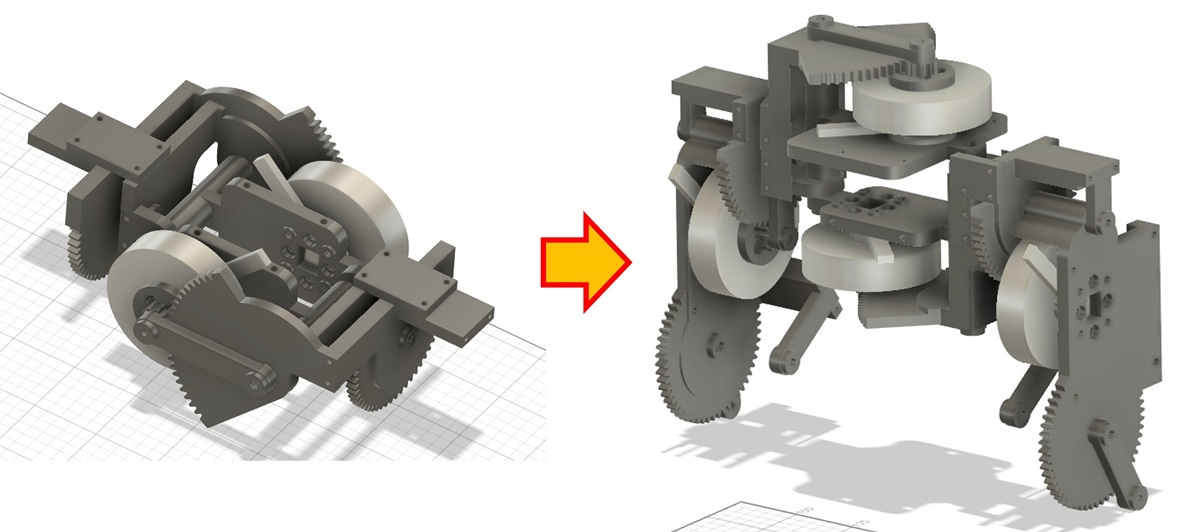
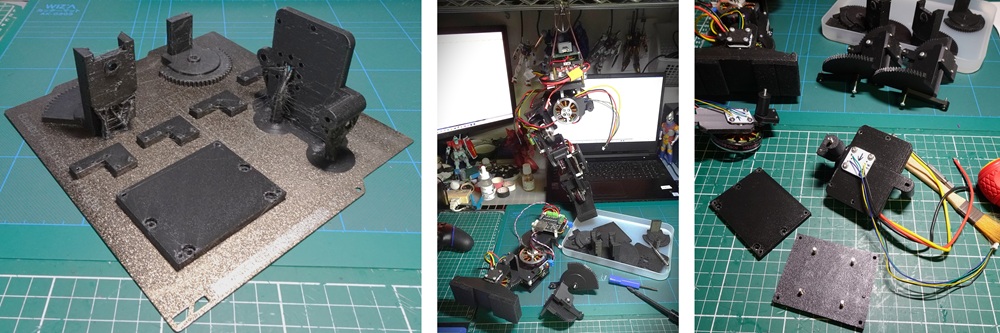
改造設計して早速組み立て
Yaw軸ユニット完成
Unit pic.twitter.com/hSZwKSIQ1b
— HomeMadeGarbage (@H0meMadeGarbage) July 27, 2025
ロボに組み込み
完成!動作確認
でけた
けど重心高くなってブレブレ。。 pic.twitter.com/hzARVmA3CC
— HomeMadeGarbage (@H0meMadeGarbage) July 28, 2025
Yaw軸導入によって重心が高くなってしまい、フラフラだわ。。
LiPoバッテリの位置を下げてYaw軸ユニットの側面に固定してみました。
バッテリ位置下げた
次はちょっと前後のバランス悪くなったけど。。
Yaw軸による旋回を味見 pic.twitter.com/wVwe6SJekL— HomeMadeGarbage (@H0meMadeGarbage) July 30, 2025
重心が下がり左右ふらつきは低減されましたが、今度は前後のふらつきが大きくなりました (そりゃそうだわな(;’∀’))。。
しかしYaw軸ユニットによる旋回動作を試してみたところ、いい感じに回ったので収穫はございました。
Yaw軸ユニットリニューアル
重心改善のためにユニットを作り直しました。
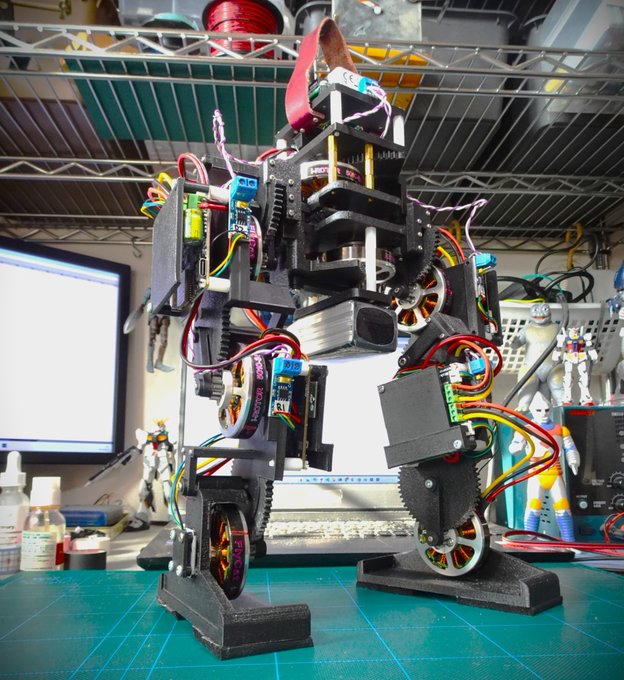
- ユニット高さを詰めて削減
- バッテリをユニット底面のバランスよい位置に固定
アンバランスによるふらつきは大きく改善されました。
リテイクだけがエンジニアの人生だ。
Yaw軸ユニット作り直した pic.twitter.com/Atw3Ugn6NH
— HomeMadeGarbage (@H0meMadeGarbage) July 31, 2025
動作
旋回動作
Yaw軸ユニットによる旋回動作 pic.twitter.com/De3kRWp4Q6
— HomeMadeGarbage (@H0meMadeGarbage) August 4, 2025
Yaw軸股関節のあるロボは今回が初めてでした。
旋回動作が非常にスムーズに実施できて楽しかったであります。
おわりに
ここでは股関節ユニットのRoll軸をYaw軸に改造して、旋回動作を楽しみました。
本来なら股関節をRoll軸とYaw軸の2軸にして片足5軸で構成すればさらに素晴らしい動作が実現できるのでしょうが、モータトルク的にかなりギリギリで (特にヒザ) 重量を増すのは厳しい状況です。
シリアルリンク機構については本シリーズに加えて強化学習など様々な お勉強ができて楽しかったです。
シリアルリンクは構成がシンプルで作りやすいですがヒザへの負担が大きいです。
トルクもスピードも必要となります。
今後はヒザモータに着目して検討しようと考えています。
モータ選定やギア比の再考などまだまだ楽しめそうです。
ほなまた