すごい Wheel-legged ロボに憧れて1
本記事にはアフィリエイト広告が含まれます。
すごいロボットをネットで見たんです (ここ最近は毎日すごいロボ情報に驚かされていますが。。)。
これめっちゃいい
是非自身でも味わいたい!!https://t.co/YUFlAUaXWs— HomeMadeGarbage (@H0meMadeGarbage) July 6, 2025
Agibot社の X2-N というWheel-legged Robot です。
ホイール軸をシフトして足底としてしまうなんて! 凄い発想とテクノロジーだよなぁ。
ぜひ自分でも味わいたいなぁと思っておりまして、先日やったシリアルサーボ XL330 倒立振子をベースに試せるのではと考えました。
本シリーズでは憧れの X2-N の動作に近づくために実施した検証などを報告させていただきます。

目次
シリアルサーボ XL330
Wheel-legged Robot の製作にあたりホイール駆動は先日検証したシリアルサーボ XL330-M077 を採用します。
X2-N のようにホイールの固定軸を動かす足の構築が必要となります。
ここでは足駆動にも XL330-M077 を採用してみます。
ひねりホイール軸 検証
まずは同一信号系で XL330-M077 のホイール駆動 (Current Control Mode) とサーボモード (角度指定駆動) が共存できるのか検証
XL330
position ModeとCurrent Control Modeの共存 pic.twitter.com/Frcup6g5dI— HomeMadeGarbage (@H0meMadeGarbage) April 10, 2026
問題ないようです。
早速 簡素ですが ひねりホイール軸 Wheel-legged Robot を製作しました。

でけたで
味見だから
意味あるないじゃなく味見 pic.twitter.com/vOwjaLeePa— HomeMadeGarbage (@H0meMadeGarbage) April 10, 2026
見事に憧れの倒立モードと直立モードの移行を実現することができました。
しかし、ホイール駆動には高速で申し分ないのですが足駆動にはXL330-M077 だとトルク不足ですね。
ビシッと直角に直立できてません。
XL330-M288 のほうがよさそうですが残念ながら所有していません。
PWMサーボ PTK7465
次に足駆動に PTK 7465 MG を採用して動作確認します。

PTK 7465 MG は安価なのに高トルクで高速応答可能なPWMマイクロサーボです。
PTK7465を採用す pic.twitter.com/pWmrzehbhJ
— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2026
先ほどと同様に簡素な Wheel-legged Robot を組んでみました。
サーボモータ PTK7465 で倒立したり直立したり
問題なさそう直立時に歩きたいので関節増やしますか pic.twitter.com/ZOpWNh7zuV
— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2026
ビシッと直立してくれてます。
足駆動にはPTK 7465 MG を採用することにして、本格的に足を製作したいと思います。
足製作
駆動軸を増やして直立モード時に歩行できるようにします。
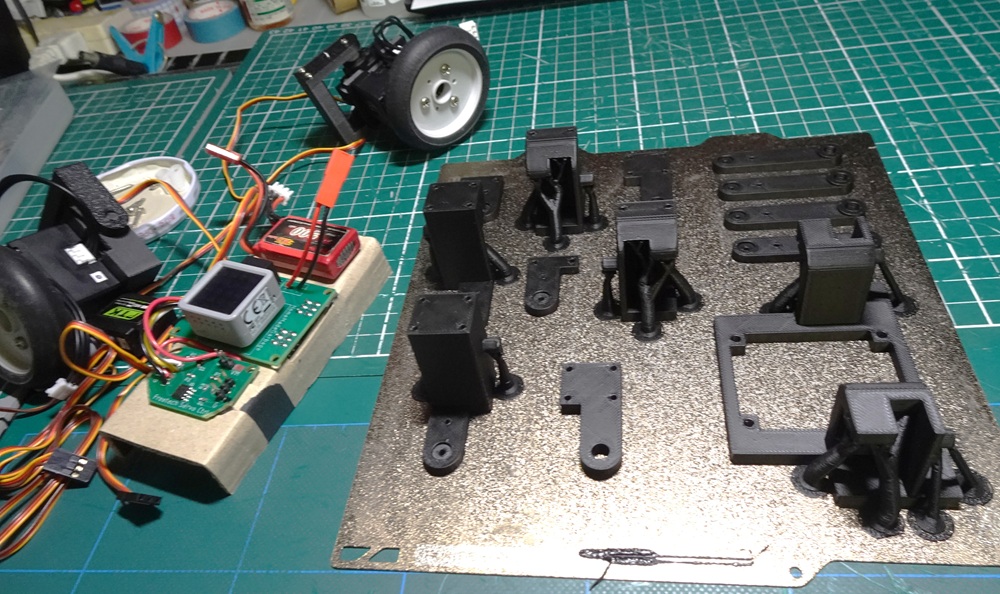
さすがにもう段ボールは使えないので Autodesk Fusion で筐体設計
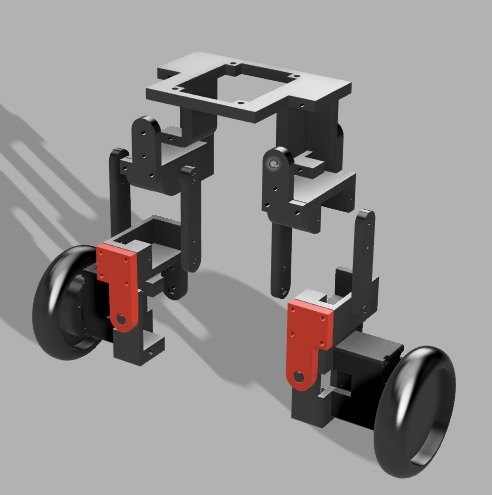
印刷終了
Hip Roll
Hip Roll pic.twitter.com/iByzX2lcA0
— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2026
Hip Pitch
Hip Pitch pic.twitter.com/RCGIDrAc6c
— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2026
Knee Pitch
Knee Pitch pic.twitter.com/UAjFgaq7uo
— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2026
Ankle Roll
Ankle Roll pic.twitter.com/4ki6TtsJp1
— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2026
完成
俺なりのWheel-legged Robot が完成
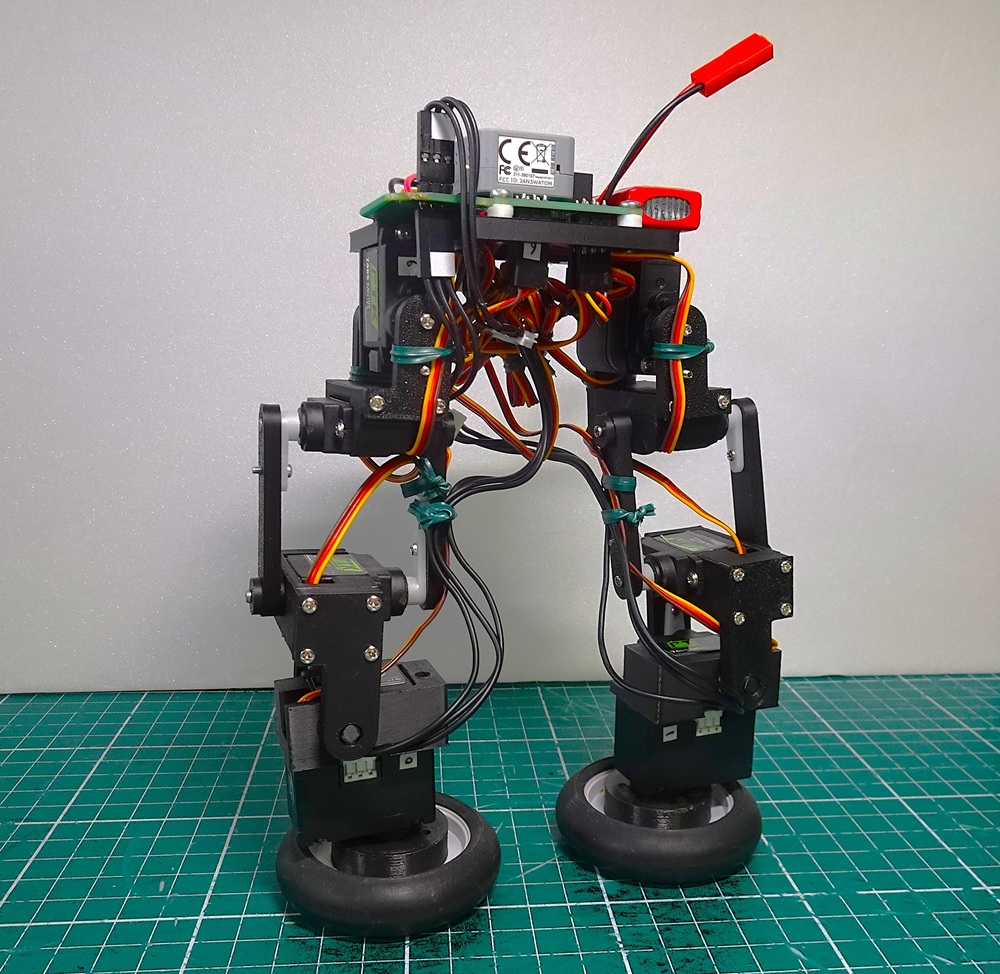
構成はこんな感じ
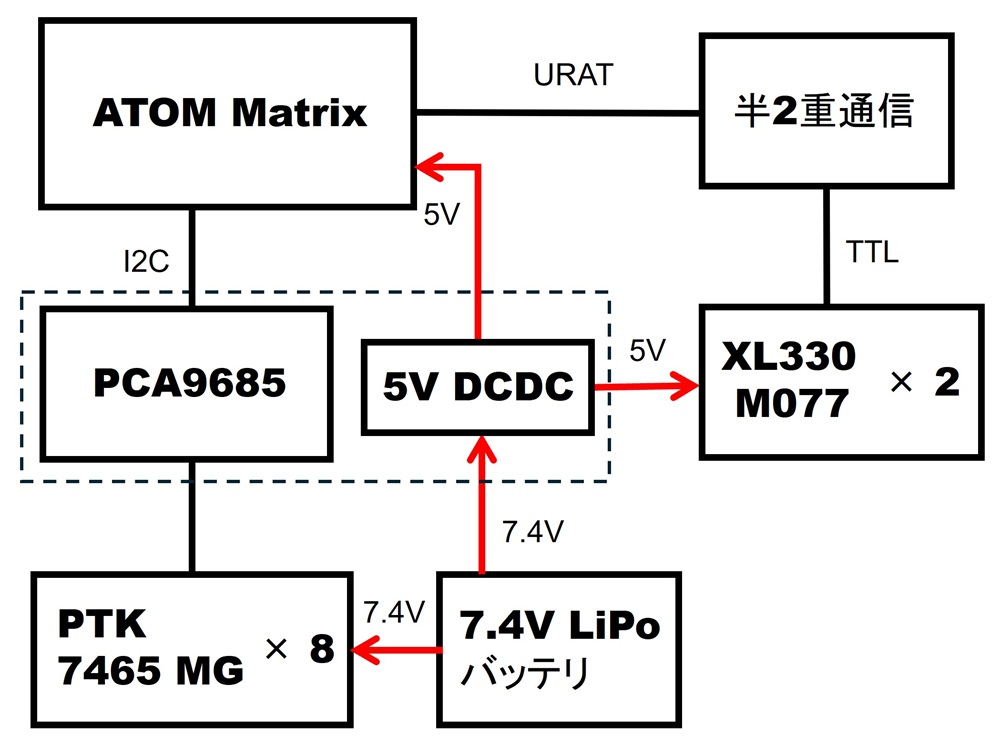
PWMサーボ駆動回路には以下の素晴らしい基板を使用しています。
この基板がなければ本ロボは完成させることができませんでした。実に素晴らしい!!
動作味見
見事倒立
さて やりますかぁ pic.twitter.com/gE3Su3X2Iz
— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2026
直立モードからの移行が難しそうだな。。。
検証を進めましょう!!
動作検証
IK (逆運動学)
IKで足先位置を変えれるようにしました。
— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2026
足前後シフト バランス制御
足前後シフトでバランスさせて常に機体を平行維持するようにしました。
足前後シフトでバランスさせて機体を平行維持
もうちょい制御詰める必要があるのと
倒立/直立のモード移行もどうにかしないといけない pic.twitter.com/JVyWK6lqsf— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2026
足前後は機体ピッチ角のPID制御で実現
また一歩憧れに近づきました。
— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2026
モード移行検討
要の直立/倒立モード移行の検討をします。
モード移行は足高さを最大にした直立姿勢で実施することにしました。
モード移行はこんなもんかな
よっしゃ 直立モード時の歩行 考えますかぁ pic.twitter.com/moarE0udZd— HomeMadeGarbage (@H0meMadeGarbage) April 13, 2026
またまた一歩憧れに近づきました。
— HomeMadeGarbage (@H0meMadeGarbage) April 13, 2026
おわりに
Agibot社の X2-N に憧れて自分なりのWheel-legged Robot を製作しました。
倒立モード / 直立モードの移行まで検証できましたので次回は直立モード時の歩行の検証を実施したいと思います。
憧れに少しでも近づくべく頑張って生きていきたいと思います。