AIエージェント Codex で 倒立振子
本記事にはアフィリエイト広告が含まれます。
お母ちゃん![]() が Codex すごく便利で使ったらもう離れられないってさ
が Codex すごく便利で使ったらもう離れられないってさ
Codex試してみたら便利すぎた
— ムプー (@j6XX2IChZG99891) May 8, 2026
そこまで言うならと興味が湧いて、試してみたので報告いたします。

目次
Codex
Codexとは、OpenAIが提供するコーディング用AIエージェントです。
自然言語で指示するだけでコードを書いてくれます。
ここではCLI版を使用しました。
コマンドプロンプトで起動・使用します。
以下で簡単にインストールできました。
|
1 |
npm i -g @openai/codex |
起動はワークスペースで以下を入力するだけです。
|
1 |
codex |
テーマ
Codexを初めて使用するに際してテーマとして”車輪倒立振子の製作”を目標と定めました。
この私がカリッカリに調整した制御。
AIなら これと同等、もしくはそれ以上の制御ができるのか? pic.twitter.com/rigGduoQJT— HomeMadeGarbage (@H0meMadeGarbage) May 12, 2026
↑こちらは手製のコードで倒立させた様子。
QDDモータ Robstride 05 を1個使用した簡素な構成の倒立振子の制御コード生成を目指します。

Codex コード生成
Codexでコード生成を開始します。
はじめてなのでドキドキしますね。
IMU
以下の指示でコードを生成してもらいました。
“ATOM Matrix用Arduinoコード
IMUの生データをブラウザで確認できるようにして
レンジ 2G, 250dps”
ワークスペース内にフォルダが作られコードが生成されました。
↓書き込んで実行
“IMUの生データをブラウザで確認できるようにして”
やるやん。。#codex pic.twitter.com/72iaHoUppL
— HomeMadeGarbage (@H0meMadeGarbage) May 12, 2026
簡素な指示でこんな立派な結果が得られ非常に驚きました。
ATOM MatrixをWiFiアクセスポイントとして指示通りブラウザでIMUセンサの結果が表示されました。
APモードでの接続は非常に私好みで大変に喜びました。
次にIMUセンサから傾斜角を導出して傾斜計を実現させます。
指示は以下の通り
“Y軸の傾斜計を実現したい カルマンフィルタで頼む
角度はブラウザで表示とLEDマトリクスでもインジケーター表示してくれ”
“Y軸の傾斜計を実現したい
カルマンフィルタで頼む
角度はブラウザで表示とLEDマトリクスでもインジケーター表示してくれ”Z軸の反転とLEDの輝度だけ手修正したけど
完璧だよね#codex pic.twitter.com/Xh6yBUwbaT— HomeMadeGarbage (@H0meMadeGarbage) May 13, 2026
またまた見事な動作が実現されました。
IMUのZ軸の符号反転 (ATOM MatrixはIMUセンサMPU6886が下向きに実装されている) とLEDの輝度のみ手修正しました。
カルマンフィルタ関数も生成され、LEDインジケータなんて超俺好みです。
またまた大いに喜ばされました。
QDDモータ
次にQDDモータ Robstride 05 の駆動コードを生成します。
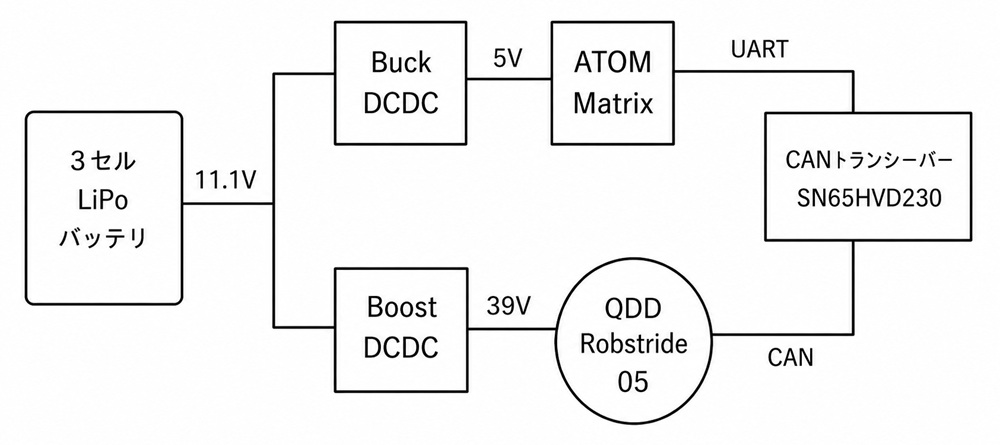
”RobStride 05 (ID:0x7e) を速度モードで制御
ブラウザで速度指定
マイコンはATOM Matrix
CANトランシーバはSN65HVD230 VP230
CAN_TX:GPIO32
CAN_RX:GPIO26
最終的には倒立振子製作を目指すので高速処理できる感じでヨロ”
”RobStride 05 (ID:0x7e) を速度モードで制御
ブラウザで速度指定
マイコンはATOM Matrix
CANトランシーバはSN65HVD230 VP230
CAN_TX:GPIO32
CAN_RX:GPIO26
最終的には倒立振子製作を目指すので高速処理できる感じでヨロ”マジでやばいな
人間いらねーじゃん#codex pic.twitter.com/wsSRLgcFCE— HomeMadeGarbage (@H0meMadeGarbage) May 13, 2026
またまた簡素な指示で所望の結果を得ることができました。
逆に怖い。。
RobStride 05の仕様書とかの情報も与えてないのに。。。なんでできるの??
さっきからずっと俺のこと喜ばせすぎだって。。。
大きな勘違い
あまりにも自分好みのコードが簡単に生成されてしまうので、過去のOpenAIでのやり取りとかも参照されてるなどの疑念が湧きました。
怖すぎるのでCodexに聞いてみた。

あー!ワークスペース内のファイル読むのねー!!!!
実はワークスペース内に冒頭の倒立動作の手製コードが保存されていたのです。。。
あまりにもすんなり所望のコードが生成されるからすごく怖くなったけど、
APモードによるブラウザアプリやLEDインジケータの仕様の一致や、Robstride05のモード変更アドレスなどを知っていることも フォルダ内コードの参照で説明がつきます。
びびったー。。。ファイルをどこまでみてるか きちんと把握したうえで利用しないと危ないですね。
お母ちゃん![]() にも生成中のログをみるように注意を受けました。
にも生成中のログをみるように注意を受けました。
倒立動作実現
あらかたCodexがどういうものか理解できたので、目的の倒立動作を目指します。
以下の仕様でコードを生成
・カルマンフィルタは以下のライブラリを使用
https://github.com/TKJElectronics/KalmanFilter
・倒立制御は機体の傾斜角と角速度によるPD制御
・PD制御のゲインはブラウザで調整
生成されたコードで動作
とりあえず 傾斜角とその角速度のPD制御で倒立するコードを生成していただく
ゲインはブラウザで調整#codex pic.twitter.com/eEJWcT6L7m
— HomeMadeGarbage (@H0meMadeGarbage) May 13, 2026
イイ感じ。
さらにモータ回転速度のフィードバックも追加しました。
傾斜のPDにくわえてホイール回転速度もフィードバックするコードを生成いただく
各ゲインはブラウザアプリのスライダで調整#codex コーディングしなくていいのは大変に楽
でももっと凄いことできるよね pic.twitter.com/LcVp61Dx1l— HomeMadeGarbage (@H0meMadeGarbage) May 13, 2026
倒立の安定性はさらに向上しました。
ただ指示するだけでコード生成されるのは非常に便利です。
かっこいいUIのアプリも自分では絶対に作れないし。
でもなーんか当初持っていたAIエージェントの期待を上回ってないような。。。
なんかもっと思いもよらない制御方法を魔法のように示してくれないだろうか?
しかし、自分の想像を超えた倒立方法を引き出すためのAIエージェントへの指示方法が思いつかない。。。
パラメータ調整
動作ログを評価して動作パラメータを自動調整するコードの生成をお願いしてみました。
起上り動作を実施して傾斜角と傾斜角速度のログを評価して、起き上がり時のホイール速度のコントロールパラメータを自動調整するアプリです。
起上り動作
ログとって起き上がり時の傾斜PゲインやMax速度を調整してくれるコードを生成いただく#codex pic.twitter.com/8AlGIqeLyi— HomeMadeGarbage (@H0meMadeGarbage) May 13, 2026
起き上がり時のモータ回転の機体傾斜PゲインやMax速度を調整しています。
こんな感じで倒立動作もログで評価してパラメータ調整できるかもと考えたのですが、
これもなんか違う気がしたので止めました。
だってこれでも結局 倒立方式はこちら側の指示になるだよ。
なんかこうもっと逸脱した制御方式が生まれるような方式思いつきたいわ
おわりに
ここではAIエージェント Codexで車輪倒立振子のコード生成を楽しみました。
ちょっとこちらサイドの勘違いもありましたが、自然言語によるコード生成は非常にエキサイティングなものでありました。
私自身プログラミング作業が大嫌いなので今後もCodexを活用することになりそうですが、”AIエージェント” っていうからにはもっと自身の能力を大きく逸脱した結果を出せるようにしたい。
作業効率化だけじゃない何かがあるはずなので、引き続き勉強します。