予算3万円でつくる BLDC 2足歩行ロボット 第2号
ー足のIKを楽しむー
本記事にはアフィリエイト広告が含まれます。
前号では記念すべき創刊ということでSimpleFOCによるBLDC制御についてもろもろ紹介させていただきました。
本号ではロボットの左足となる足を1本完成させます。
足を上下前後に移動するための逆運動学についても紹介いたします。
こうかな pic.twitter.com/DozASWVB1A
— HomeMadeGarbage (@H0meMadeGarbage) August 24, 2025

目次
はじめに
ここからは足の完成に向けて組み立て手順通りに記載します。
作業前の前提としましては創刊号の FOC回転位置制御が書き込まれ、モータ回転方向やエンコーダオフセット初期値設定がさせているものとします。
ギア等は外しておいてください。
また裏面のスペーサも必要ないので外してください。

本号で必要な部品
主な必要部品及び数量は創刊号 と全く一緒です。
ねじ等は足組み立てのために各種必要となります。
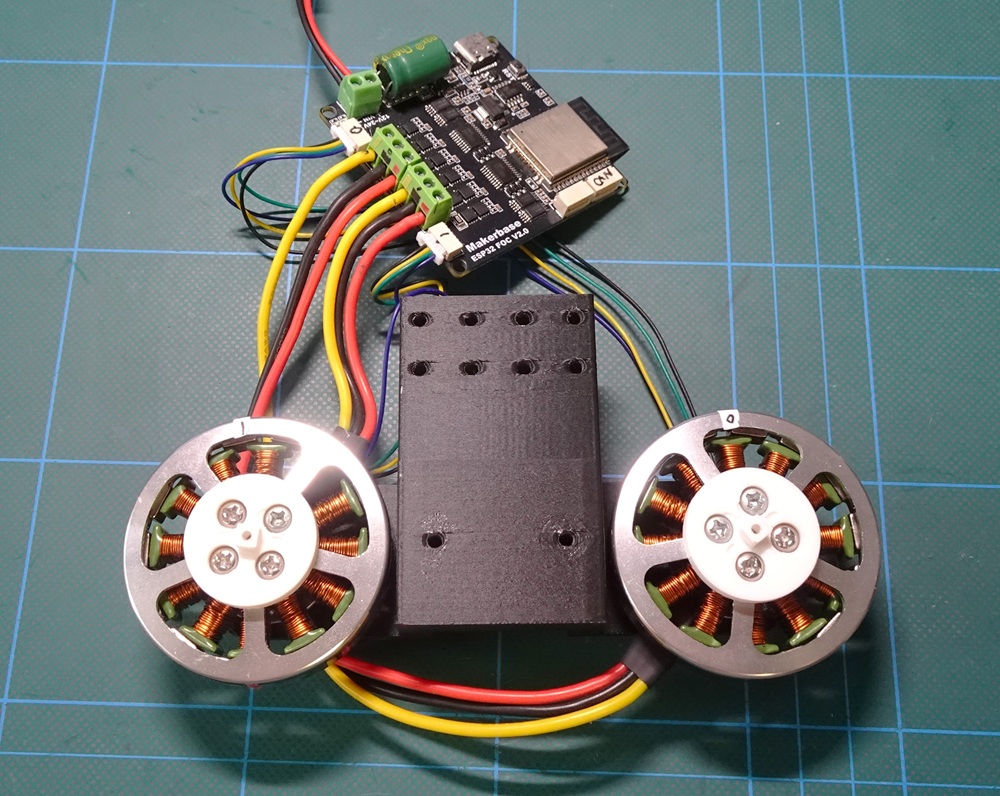
- BLDCコントローラ MKS ESP32 FOC V2.0 :1個

- BLDC 5010 360KV:2個
- 磁気エンコーダ AS5600:2個
- LiPoバッテリ 3セル 11.1V:1個
本号では安定化電源 (12V)の使用を想定していますが、完成ロボはLiPoバッテリを使用します。
- PS4コントローラ
本ロボは基本的にはPS4コントローラでの操作となります。必須ではないですがあると便利です。
- その他
10mm以上のねじスペーサ:4個
M2ナット:6個
M2 12mm なべネジ:4本
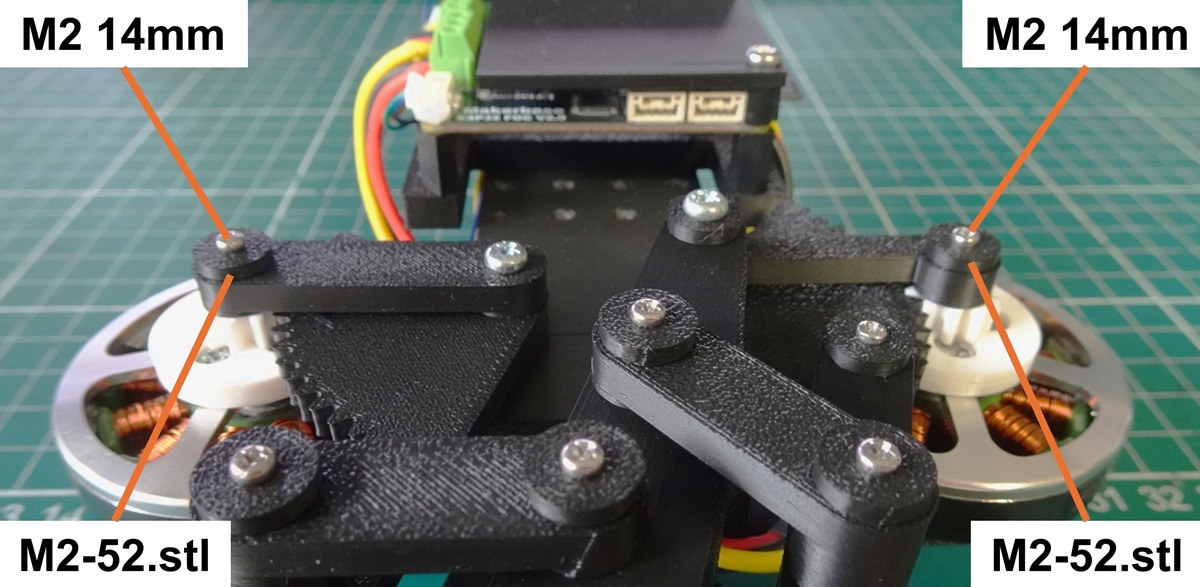
M2 14mm なべネジ:2本
M2 20mm なべネジ:6本
M2 25mm なべネジ:2本
M3ナイロンネジ:2本
M3ナット:2個
M3 14mm なべネジ:2本
M3 18mm なべネジ:1本
M3 20mm なべネジ:1本
M3 25mm なべネジ:5本
M3 30mm なべネジ:1本


ロボット完成に必要な主な部品
AliExpressでの部品購入は到着までに日数がかかるので、あらかじめロボ完成までの部品を購入しておきたい方のために主な必要部品をまとめておきます。
| # | 品目 | 数量 |
| 1 | MKS ESP32 FOC V2.0 | 3 |
| 2 | BLDC 5010 360KV | 6 |
| 3 | 磁気エンコーダ AS5600 | 6 |
| 4 | ATOM Matrix | 1 |
| 5 | CANコントローラボード | 4 |
| 6 | 4ピン GHコネクタケーブル 150mm | 4 |
| 7 | LiPoバッテリ 3セル 11.1V | 1 |
3Dモデル
今回使用する追加の筐体の3Dモデルデータは以下で販売しております。
zipファイルでダウンロードされますので解凍してご利用ください。
データには21個のstlファイルがあり leg7.stl, M2-102.stl,
M3-155.stlは2個づつプリントし、その他は1個づつ印刷してください。
足の組み立てには一部を除いて創刊号のモデルも使用します。
M2-52.stlにつきましては合計10個使用しますので追加でプリントしてください。
足上部組立て
boardFix.stlの面4つ角の穴をM3ネジでねじ切りして10mmスペーサを付けます。
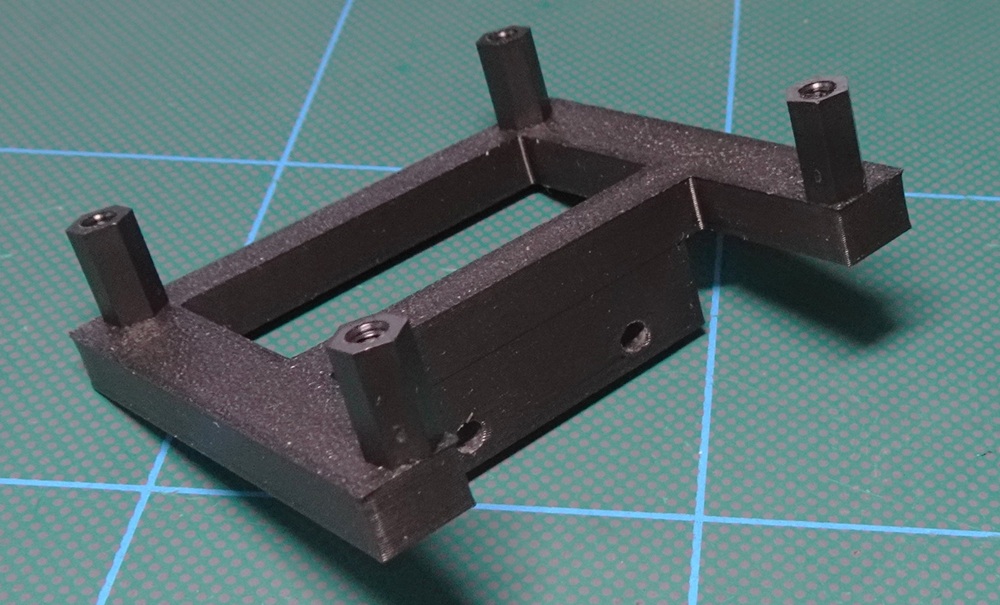
以下のようにboardFix.stlをmotorFix.stlに2か所ねじ止めします (M3 14mm なべネジ:2本)。
以下のように MKS ESP32 FOC V2.0 をスペーサにM3 ナイロンネジで2か所止めます (必須ではありません)。
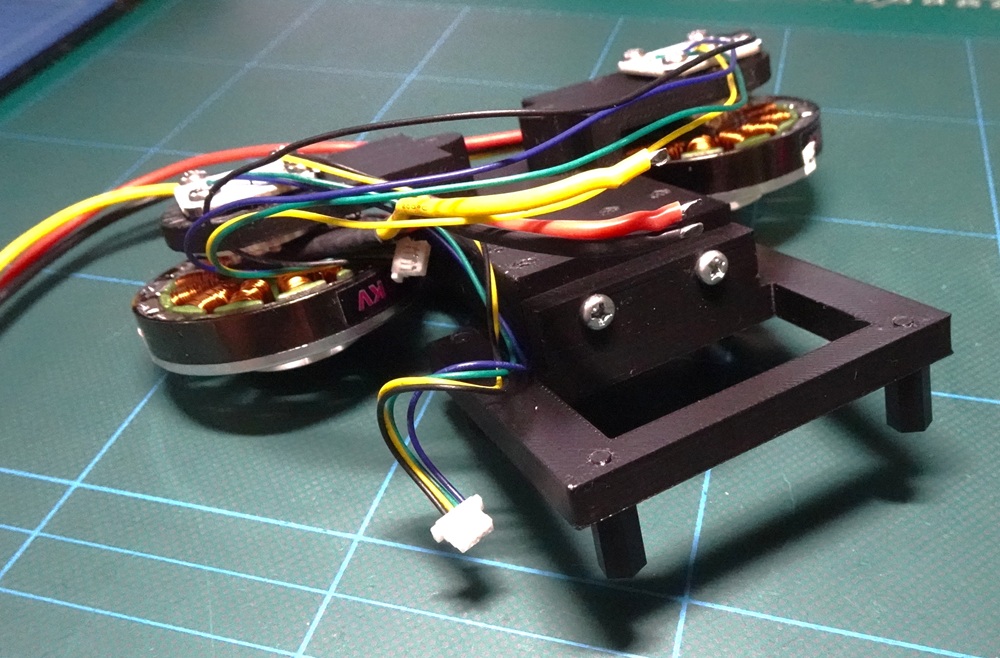
モータやエンコーダのコネクタを配線後に cover.stl をかぶせてM3 18mm、M3 25mm なべネジで固定します。
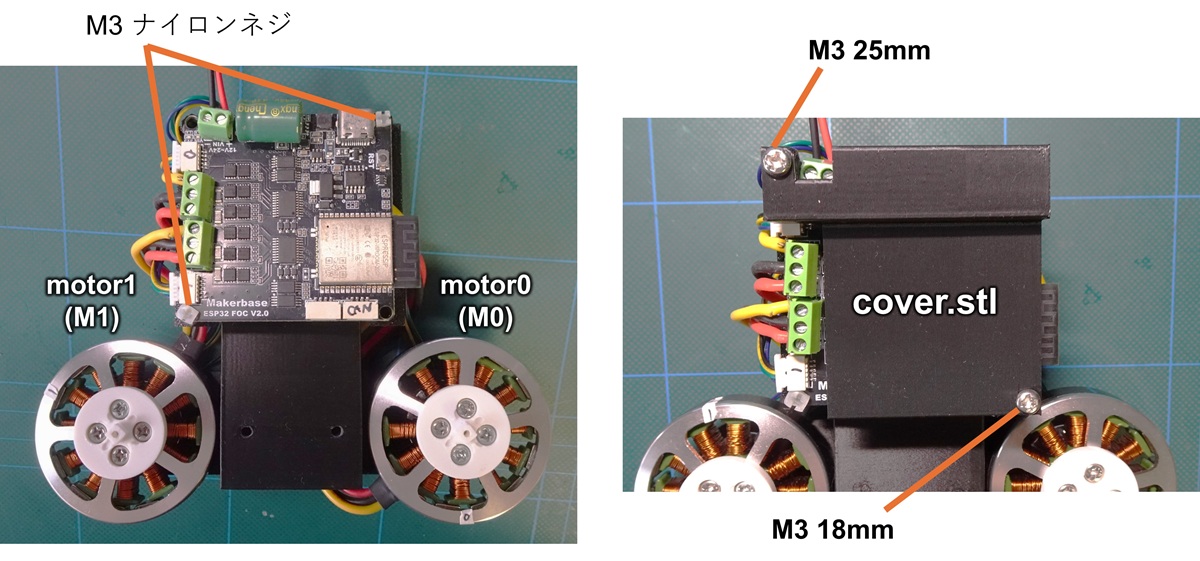
MKS ESP32 FOC V2.0のネジ穴周辺にスペースがないので、以下のようにナイロンネジの頭を切って小型化して使用しています。
足フレーム組立て
3Dプリント品を組んでリンク機構の足を作ります。
leg8.stlとleg11.stlのくぼみにM3ナットをはめ込んで、foot.stlを挟んでM3-155を通してねじ止め (M3 25mm なべネジ:2本)。
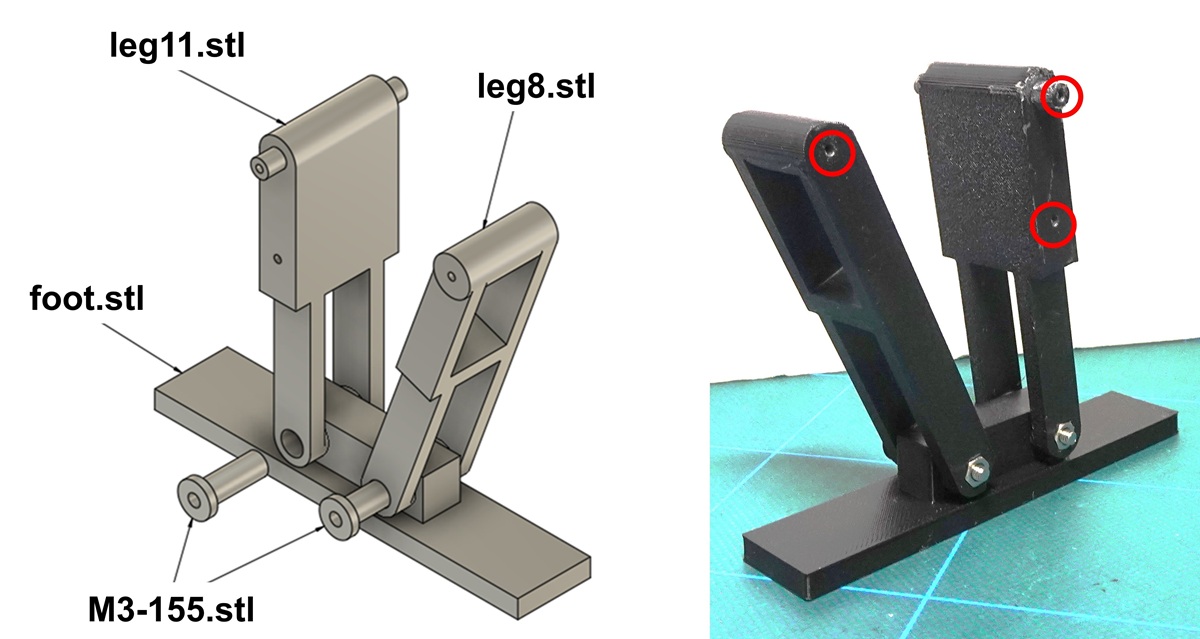
leg8.stlとleg11.stlの上図右写真の赤〇の穴はあらかじめM2ネジサイズでねじ切りしてください (反対側も)。
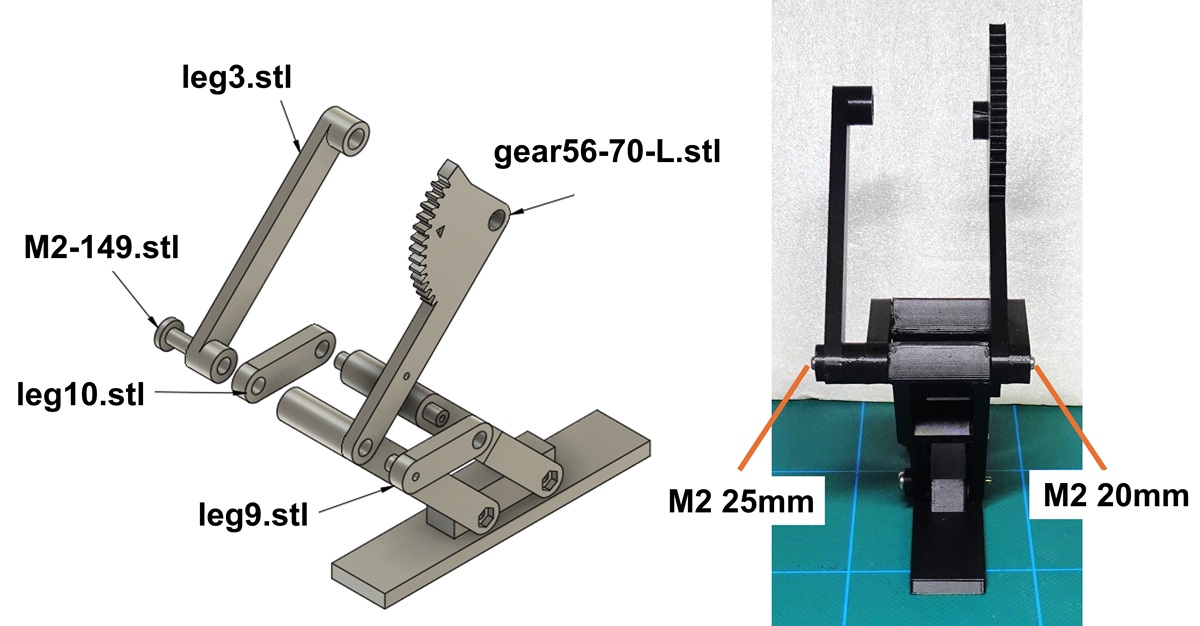
gear56-70-L.stl (創刊号付属モデル)の下部の穴にleg9.stlの突起穴を通して、leg8.stlの穴にねじ止め (M2 20mm なべネジ)。
M2-149.stlをleg9.stlとleg10.stlの穴に通してねじ止め (M2 25mm なべネジ)。
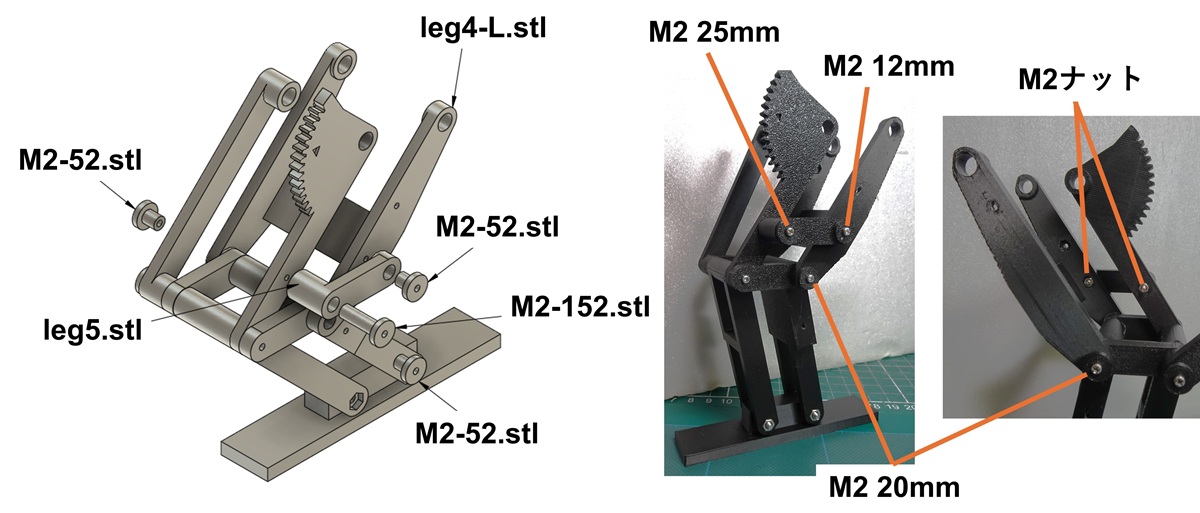
leg4-L.stl の下部の2つ穴にM2-52.stlを通して、leg11.stlの穴にねじ止め (M2 20mm なべネジ:2本)。
leg5.stlの穴にM2-152とM2-52.stlをとおしてM2ナットをはめてgear56-70-Lstlとleg4-Lstlにねじ止め (それぞれ M2 25mm, 12mm なべネジ)。
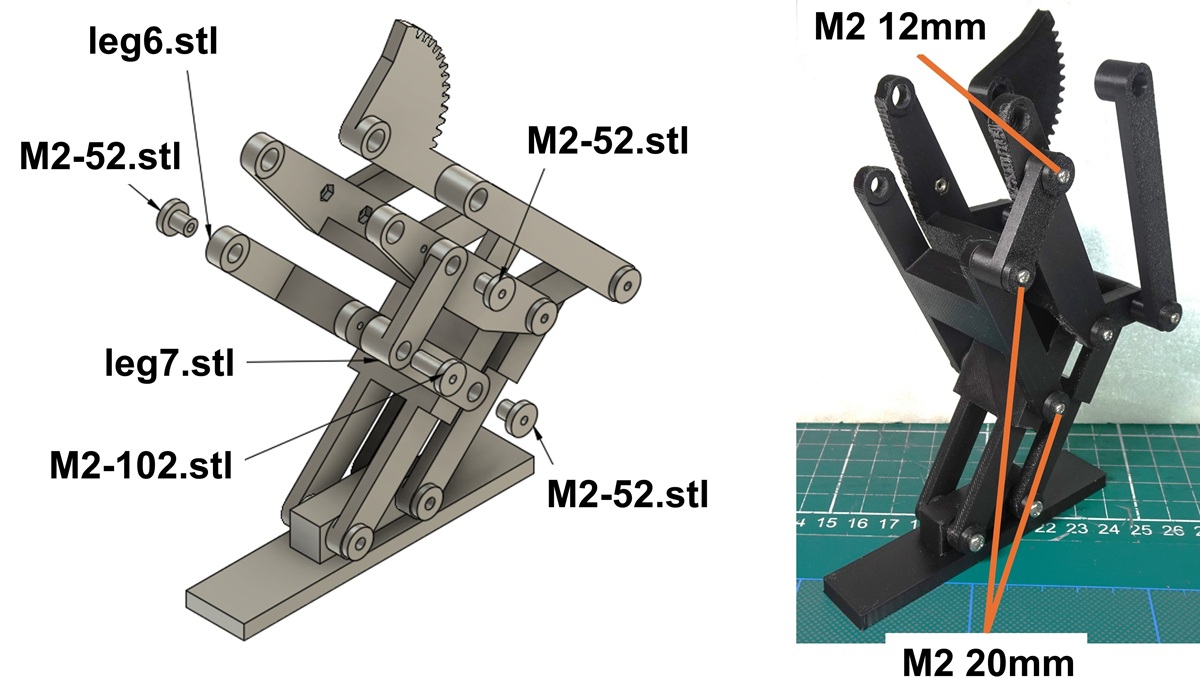
leg6.stl の下部の2つ穴にM2-52.stlを通して、leg11.stlの中段穴にねじ止め (M2 20mm なべネジ:2本)。
leg7.stlの穴にM2-102とM2-52.stlをとおしてM2ナットをはめてleg4-Lstlとleg6.stlにねじ止め (それぞれ M2 20mm, 12mm なべネジ)。
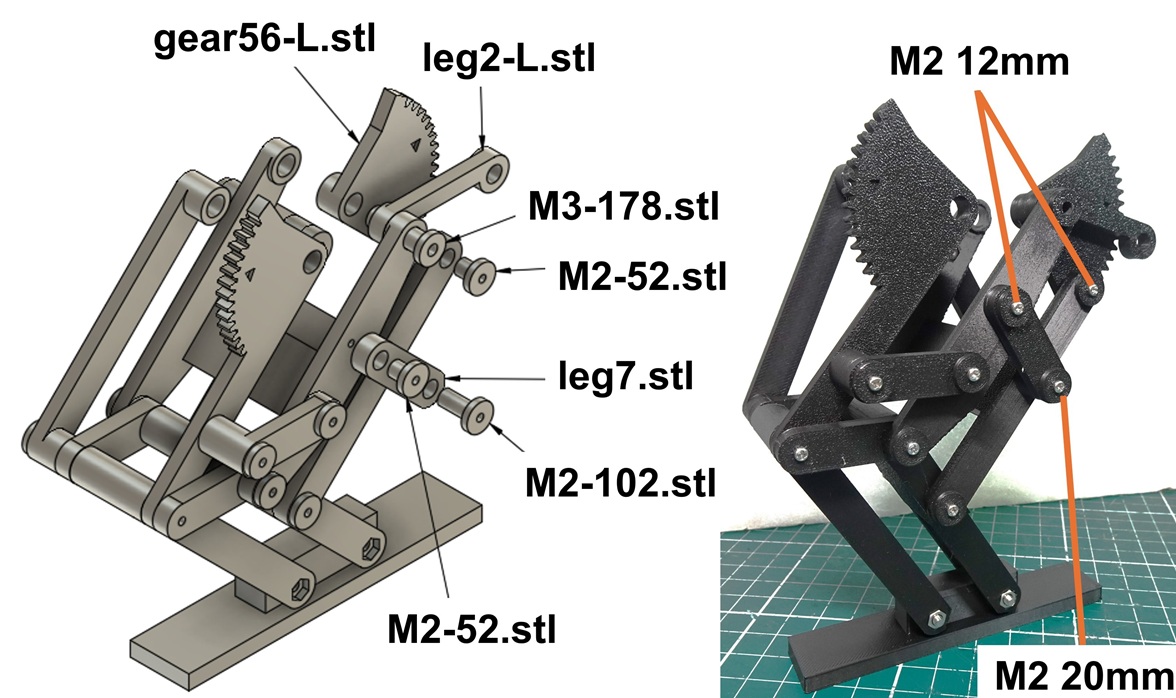
leg4-L.stl の上部の穴にM3-178.stlを通して、leg2-L .stlとgear56-L.stlを通す。
leg6.stlの穴にM2-52.stlをとおしてM2ナットをはめてgear56-L.stlにねじ止め (M2 12mm なべネジ)。
leg7.stlの穴にM2-102とM2-52.stlをとおしてleg4-Lstlとleg6.stlにねじ止め (それぞれ M2 12mm, 20mm なべネジ)。
leg6.stlの中段の穴はM2ネジサイズであらかじめねじ切りしてください
以上で左足フレームが完成です。
予算3万円でつくる BLDC 2足歩行ロボット
足フレーム pic.twitter.com/OEtbcfeFau— HomeMadeGarbage (@H0meMadeGarbage) August 31, 2025
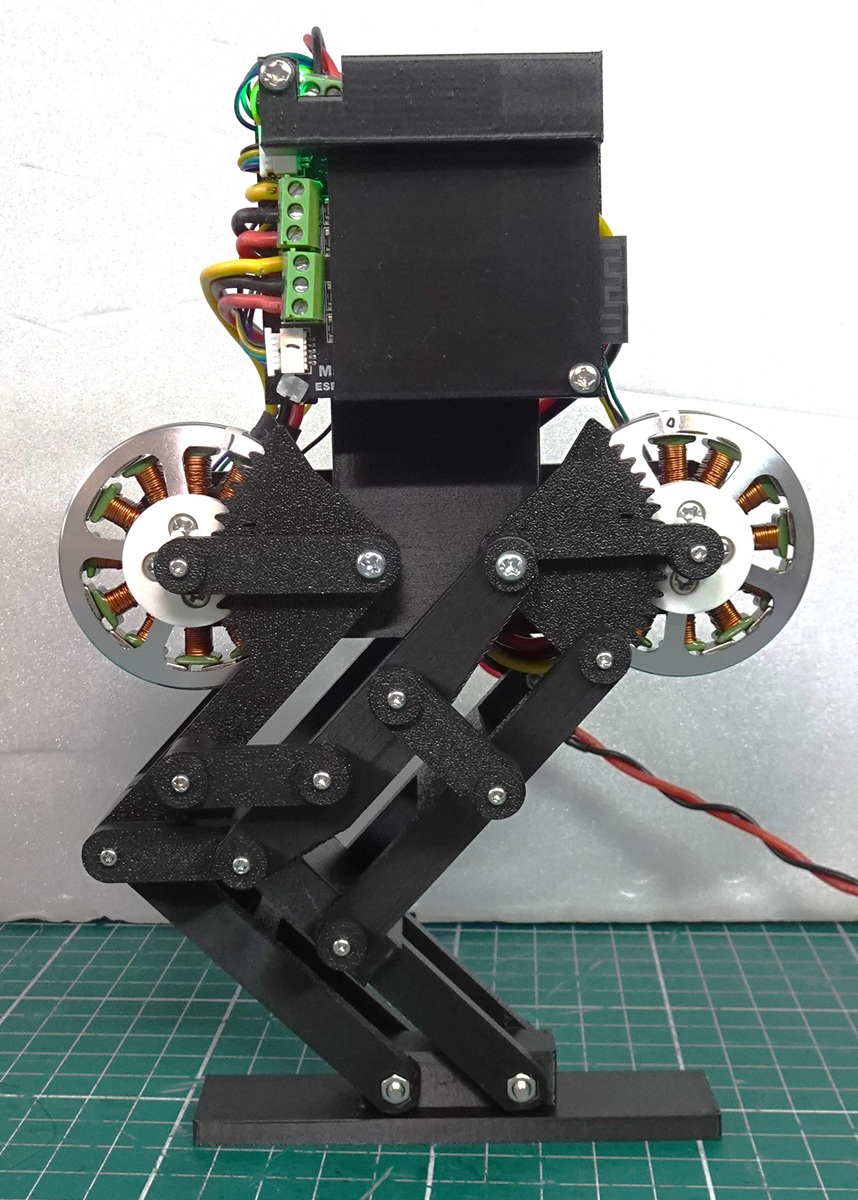
足完成
足フレームを足上部に取り付け 足を完成させます。
leg1.stl (創刊号付属モデル)の突起をgear56-70-L.stlの穴に通して、motorFix .stlにねじ止め (M3 25mm なべネジ)。
M3-178 .stlの穴にM3 30mm なべネジをとおして、motorFix .stlにねじ止め。
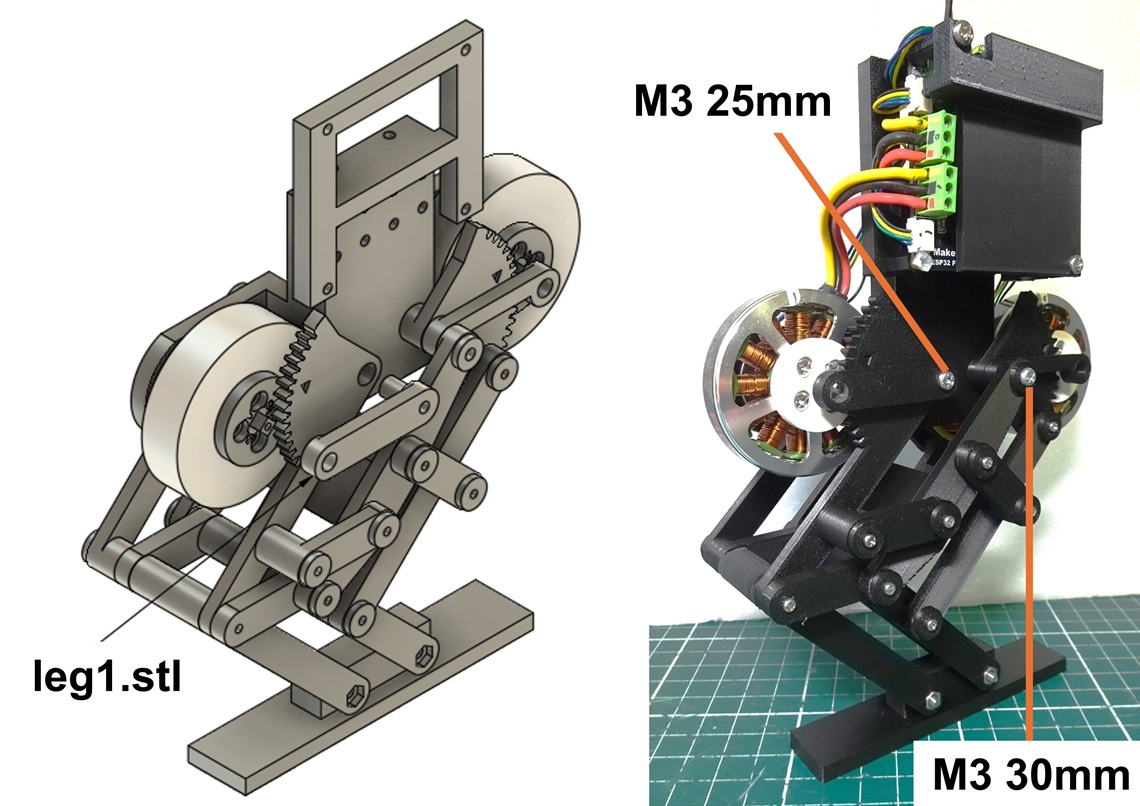
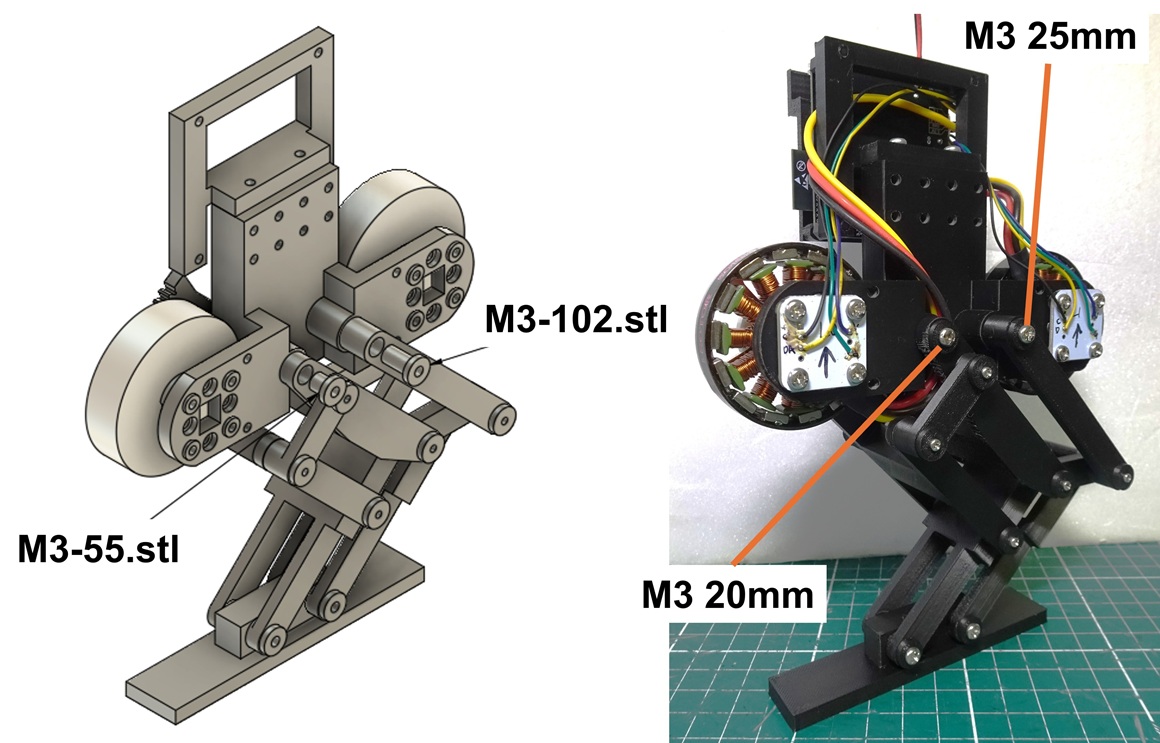
leg4-L .stlの穴にM3-55.stlをとおして、motorFix .stlにねじ止め (M3 20mm なべネジ)。
leg3 .stlの穴にM3-105.stlをとおして、motorFix .stlにねじ止め (M3 25mm なべネジ)。
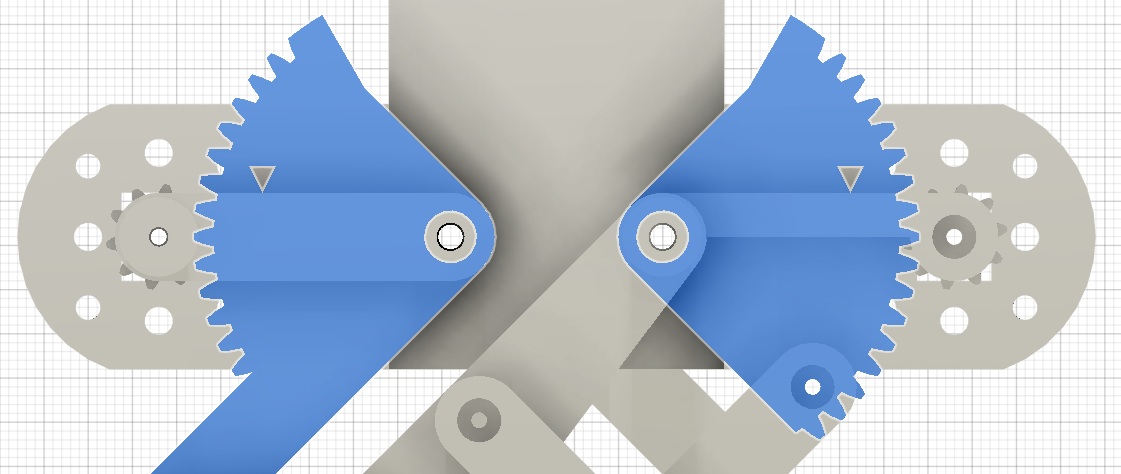
gear56-70-L.stl、gear56-L.stlのアームがだいたい45°になる位置でモータのgearFix.stlにgear10.stlをはめます。
この際にモータは初期位置であることをご確認ください。
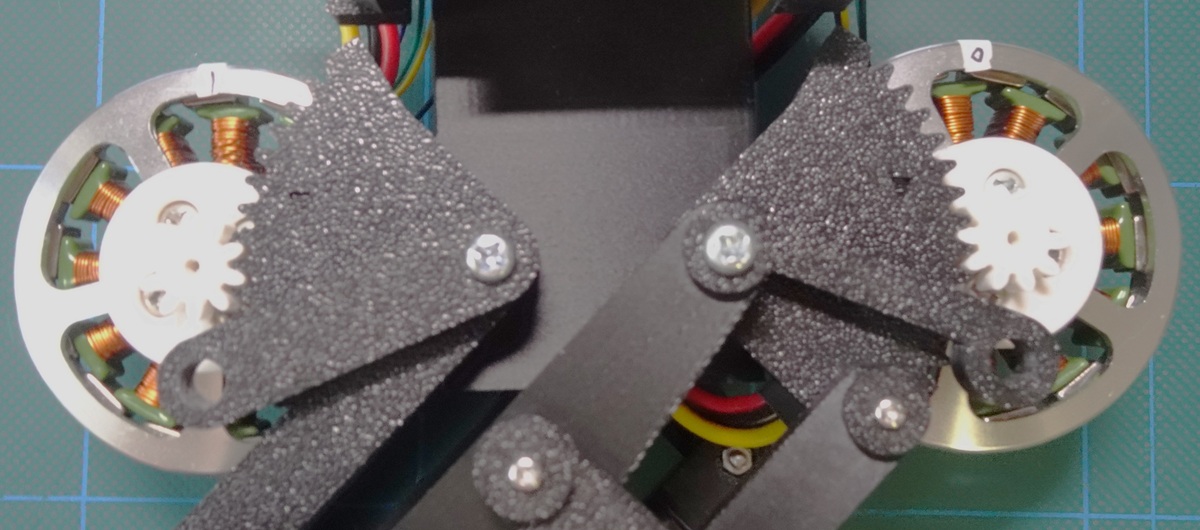
45°の目安としてgear56-70とgear56-L.stlにマーキングを入れてあります。
逆三角マークの下頂点がそれぞれleg1.stlとleg2-L.stlの上辺にかかる点が傾き45°となります。
ここではだいたい45°で問題ありません。ブラウザアプリのangleOffsetで微調整できます。
穴にM2-52.stlを通してM2 14mm なべネジでギアを固定します。
以上で足が完成です。
動作
創刊号のFOC回転位置制御Arduinoコードで足を動かします。
あらかじめブラウザアプリのangleOffsetで足位置の微調整を実施しておいてください。
予算3万円でつくる BLDC 2足歩行ロボット
FOC回転位置制御 pic.twitter.com/bdycyDjLFI— HomeMadeGarbage (@H0meMadeGarbage) September 2, 2025
PS4コントローラのジョイスティックでモータを回転させることでリンク機構の足が上下に動きます。
前回のコードではモータの電圧・電流を3V, 2Aと低出力にしているため (L. 46, 47) トルクが低く上の動画のように足を浮かさないと動きません。
逆運動学 (IK)
足が完成し、動作が確認できました。
ここからは逆運動学 (Inverse Kinematics:IK)でリンク機構の足先の位置を指定してモータの回転を制御します。
座標は以下のように定義しました。
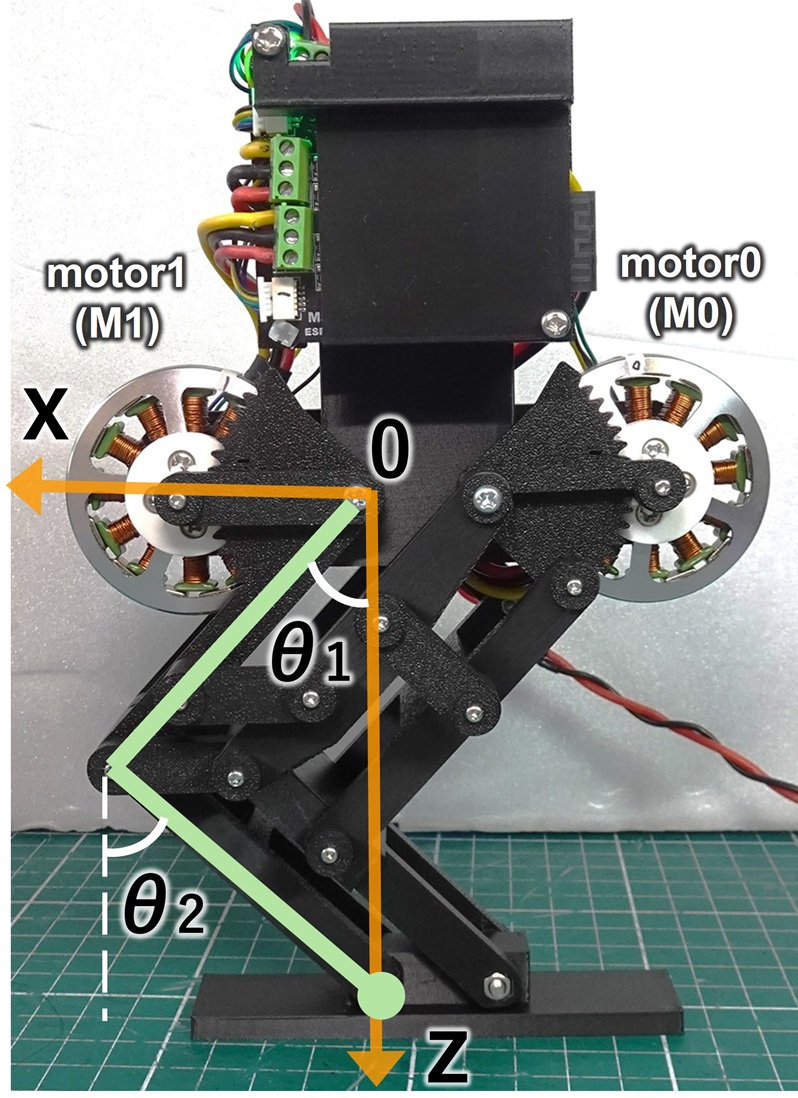
motor1で駆動するギアの回転軸を原点として、足先 (足首前方)の前後をx軸、高さをz軸とします。
motor1で大腿の角度、motor0で下腿の角度をギア比5.6の歯車を介して制御します。
大腿、下腿は同一の長さで70mmです。
逆運動学 算出
足先の座標 (x, z)から大腿、下腿の角度$θ_1$, $θ_2$を算出します。
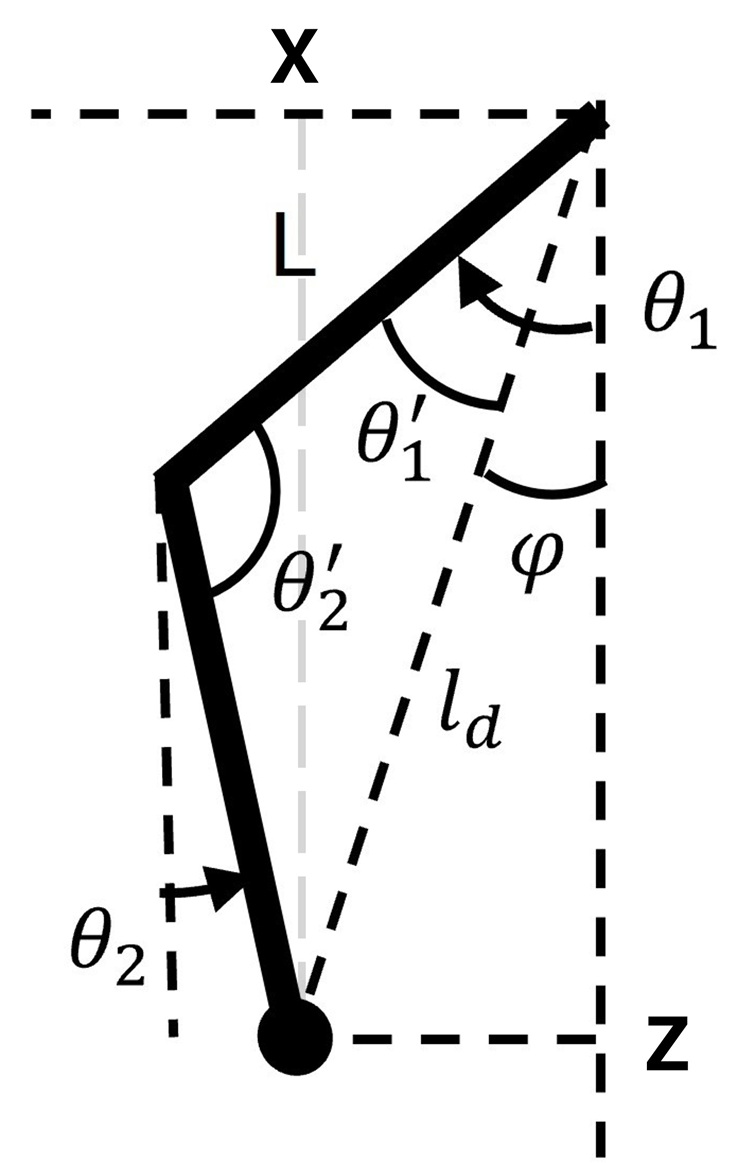
角度$θ_1$は余弦定理を用いて導出します。ちなみに$L$は大腿、下腿の長さ(70mm)。
$L^2 = L^2 + {l_d}^2 – 2{L}{l_d}\cos{θ_1}’ $
${θ_1}’ = \cos^{-1} \left(\frac{l_d}{2{L}} \right)$
$$θ_1 = φ + {θ_1}’ = φ +\cos^{-1} \left(\frac{l_d}{2{L}} \right) $$
$$ 但し、φ = \tan^{-1} \left(\frac{x}{z} \right)$$
$$ l_d = \sqrt{x^2 + z^2}$$
後方サーボの角度$θ_2$も余弦定理を用いて導出します。
${l_d}^2 = L^2 + L^2 – 2{L}{L}\cos{θ_2}’ = 2L^2 – 2L^2\cos{θ_2}’$
${θ_2}’ = \cos^{-1} \left(\frac{2L^2-{l_d}^2}{2{L}^2} \right)$
$$θ_2 =\pi-θ_1-{θ_2}’ = \pi-θ_1-\cos^{-1} \left(\frac{2L^2-{l_d}^2}{2{L}^2} \right)$$
以上より、足先の座標(x, z)を指定することで大腿、下腿の角度$θ_1$, $θ_2$を導出できるようになりました。
$θ_1$, $θ_2$にギア比5.6をかけることでモータの回転位置となります。
Arduinoコード
創刊号のFOC回転位置制御Arduinoコードを改良して、IKで足を制御できるようにします。
環境バージョンは前回と同様です。
Arduino IDEバージョン:ver. 1.8.19
ESP32ライブラリ:ver. 2.0.13
SimpleFOCライブラリ:ver. 2.3.3
PS4Controllerライブラリ:ver. 1.1.0
エンコーダオフセット値 (zero_electric_angle)は前回測定した値を入力してください。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 |
#include <SimpleFOC.h> #include <WiFi.h> #include <WebServer.h> #include <Preferences.h> #include <PS4Controller.h> float angle0 = 0.0, angle1 = 0.0; int lastLStickX = 0, lastLStickY = 0; WebServer server(80); const char ssid[] = "BLDC-L"; // SSID const char pass[] = "password"; // password const IPAddress ip(192, 168, 22, 91); // IPアドレス const IPAddress subnet(255, 255, 255, 0); // サブネットマスク Preferences preferences; //Motor Instance BLDCMotor motor0 = BLDCMotor(7); BLDCDriver3PWM driver0 = BLDCDriver3PWM(32, 33, 25, 12); BLDCMotor motor1 = BLDCMotor(7); BLDCDriver3PWM driver1 = BLDCDriver3PWM(26, 27, 14, 12); //Encoder Instance MagneticSensorI2C sensor0 = MagneticSensorI2C(AS5600_I2C); TwoWire I2Cone = TwoWire(0); MagneticSensorI2C sensor1 = MagneticSensorI2C(AS5600_I2C); TwoWire I2Ctwo = TwoWire(1); // Inline Current sensing Instance InlineCurrentSense current_sense0 = InlineCurrentSense(0.01f, 50.0f, 39, 36); InlineCurrentSense current_sense1 = InlineCurrentSense(0.01f, 50.0f, 35, 34); float L = 70.0; float height = 99.0; float angleOffset0 = 0.0, angleOffset1 = 0.0; float angleP = 60.0, angleI = 1.0, angleD = 7.0; float velP = 0.05, velI = 2.0; float velLimit = 200.0; float Vlimit = 3.0; float Ilimit = 6.0; float currentP = 1; float currentI = 500; float currentTf = 2; //ブラウザ表示 void handleRoot() { String temp = "<!DOCTYPE html> \n<html lang=\"ja\">"; temp += "<head>"; temp += "<meta charset=\"utf-8\">"; temp += "<title>BLDC-L</title>"; temp += "<meta name=\"viewport\" content=\"width=device-width, initial-scale=1\">"; temp += "<style>"; temp += ".container{"; temp += " max-width: 500px;"; temp += " margin: auto;"; temp += " text-align: center;"; temp += " font-size: 1.2rem;"; temp += "}"; temp += "span,.pm{"; temp += " display: inline-block;"; temp += " border: 1px solid #ccc;"; temp += " width: 50px;"; temp += " height: 30px;"; temp += " vertical-align: middle;"; temp += " margin-bottom: 20px;"; temp += "}"; temp += "span{"; temp += " width: 120px;"; temp += "}"; temp += "button{"; temp += " width: 100px;"; temp += " height: 40px;"; temp += " font-weight: bold;"; temp += " margin-bottom: 20px;"; temp += "}"; temp += "</style>"; temp += "</head>"; temp += "<body>"; temp += "<div class=\"container\">"; temp += "<h3>BLDC-L</h3>"; //angleOffset0 temp += "angleOffset0<br>"; temp += "<a class=\"pm\" href=\"/angleOffset0M\">-</a>"; temp += "<span>" + String(angleOffset0) + "</span>"; temp += "<a class=\"pm\" href=\"/angleOffset0P\">+</a><br>"; //angleOffset1 temp += "angleOffset1<br>"; temp += "<a class=\"pm\" href=\"/angleOffset1M\">-</a>"; temp += "<span>" + String(angleOffset1) + "</span>"; temp += "<a class=\"pm\" href=\"/angleOffset1P\">+</a><br>"; //angleP temp += "angleP<br>"; temp += "<a class=\"pm\" href=\"/anglePM\">-</a>"; temp += "<span>" + String(angleP) + "</span>"; temp += "<a class=\"pm\" href=\"/anglePP\">+</a><br>"; //angleI temp += "angleI<br>"; temp += "<a class=\"pm\" href=\"/angleIM\">-</a>"; temp += "<span>" + String(angleI) + "</span>"; temp += "<a class=\"pm\" href=\"/angleIP\">+</a><br>"; //angleD temp += "angleD<br>"; temp += "<a class=\"pm\" href=\"/angleDM\">-</a>"; temp += "<span>" + String(angleD) + "</span>"; temp += "<a class=\"pm\" href=\"/angleDP\">+</a><br>"; //velP temp += "velP<br>"; temp += "<a class=\"pm\" href=\"/velPM\">-</a>"; temp += "<span>" + String(velP) + "</span>"; temp += "<a class=\"pm\" href=\"/velPP\">+</a><br>"; //velI temp += "velI<br>"; temp += "<a class=\"pm\" href=\"/velIM\">-</a>"; temp += "<span>" + String(velI) + "</span>"; temp += "<a class=\"pm\" href=\"/velIP\">+</a><br>"; //velLimit temp += "velLimit<br>"; temp += "<a class=\"pm\" href=\"/velLimitM\">-</a>"; temp += "<span>" + String(velLimit) + "</span>"; temp += "<a class=\"pm\" href=\"/velLimitP\">+</a><br>"; temp += "</div>"; temp += "</body>"; server.send(200, "text/HTML", temp); } void angleOffset0M() { if (angleOffset0 >= -360.0) { angleOffset0 -= 1.0; preferences.putFloat("angleOffset0", angleOffset0); ik(0.0, height); } handleRoot(); } void angleOffset0P() { if (angleOffset0 < 360.0) { angleOffset0 += 1.0; preferences.putFloat("angleOffset0", angleOffset0); ik(0.0, height); } handleRoot(); } void angleOffset1M() { if (angleOffset1 >= -360.0) { angleOffset1 -= 1.0; preferences.putFloat("angleOffset1", angleOffset1); ik(0.0, height); } handleRoot(); } void angleOffset1P() { if (angleOffset1 < 360.0) { angleOffset1 += 1.0; preferences.putFloat("angleOffset1", angleOffset1); ik(0.0, height); } handleRoot(); } void velPM() { if (velP >= 0.0) { velP -= 0.01; preferences.putFloat("velP", velP); motor0.PID_velocity.P = velP / 10.0; motor1.PID_velocity.P = velP / 10.0; } handleRoot(); } void velPP() { if (velP < 3.0) { velP += 0.01; preferences.putFloat("velP", velP); motor0.PID_velocity.P = velP / 10.0; motor1.PID_velocity.P = velP / 10.0; } handleRoot(); } void velIM() { if (velI >= 0.0) { velI -= 0.1; preferences.putFloat("velI", velI); motor0.PID_velocity.I = velI; motor1.PID_velocity.I = velI; } handleRoot(); } void velIP() { if (velI < 20.0) { velI += 0.1; preferences.putFloat("velI", velI); motor0.PID_velocity.I = velI; motor1.PID_velocity.I = velI; } handleRoot(); } void anglePM() { if (angleP >= 0.0) { angleP -= 1.0; preferences.putFloat("angleP", angleP); motor0.P_angle.P = angleP; motor1.P_angle.P = angleP; } handleRoot(); } void anglePP() { if (angleP < 400.0) { angleP += 1.0; preferences.putFloat("angleP", angleP); motor0.P_angle.P = angleP; motor1.P_angle.P = angleP; } handleRoot(); } void angleIM() { if (angleI >= 0.0) { angleI -= 0.1; preferences.putFloat("angleI", angleI); motor0.P_angle.I = angleI; motor1.P_angle.I = angleI; } handleRoot(); } void angleIP() { if (angleI < 400.0) { angleI += 0.1; preferences.putFloat("angleI", angleI); motor0.P_angle.I = angleI; motor1.P_angle.I = angleI; } handleRoot(); } void angleDM() { if (angleD >= 0.0) { angleD -= 0.1; preferences.putFloat("angleD", angleD); motor0.P_angle.D = angleD; motor1.P_angle.D = angleD; } handleRoot(); } void angleDP() { if (angleD < 400.0) { angleD += 0.1; preferences.putFloat("angleD", angleD); motor0.P_angle.D = angleD; motor1.P_angle.D = angleD; } handleRoot(); } void velLimitM() { if (velLimit >= 0.0) { velLimit -= 10.0; preferences.putFloat("velLimit", velLimit); motor0.velocity_limit = velLimit; motor1.velocity_limit = velLimit; } handleRoot(); } void velLimitP() { if (velLimit < 500.0) { velLimit += 10.0; preferences.putFloat("velLimit", velLimit); motor0.velocity_limit = velLimit; motor1.velocity_limit = velLimit; } handleRoot(); } //Core0 void web(void *pvParameters) { PS4.begin(); WiFi.softAP(ssid, pass); // SSIDとパスの設定 delay(100); // 追記:このdelayを入れないと失敗する場合がある WiFi.softAPConfig(ip, ip, subnet); // IPアドレス、ゲートウェイ、サブネットマスクの設定 IPAddress myIP = WiFi.softAPIP(); // WiFi.softAPIP()でWiFi起動 server.on("/", handleRoot); server.on("/angleOffset0P", angleOffset0P); server.on("/angleOffset0M", angleOffset0M); server.on("/angleOffset1P", angleOffset1P); server.on("/angleOffset1M", angleOffset1M); server.on("/velPP", velPP); server.on("/velPM", velPM); server.on("/velIP", velIP); server.on("/velIM", velIM); server.on("/velLimitP", velLimitP); server.on("/velLimitM", velLimitM); server.on("/anglePP", anglePP); server.on("/anglePM", anglePM); server.on("/angleIP", angleIP); server.on("/angleIM", angleIM); server.on("/angleDP", angleDP); server.on("/angleDM", angleDM); server.begin(); ik(0.0, height); for (;;) { server.handleClient(); if (PS4.isConnected()) { //PS4コントローラ int currentLStickX = PS4.LStickX(); int currentLStickY = PS4.LStickY(); if (currentLStickX != lastLStickX || currentLStickY != lastLStickY) { float Lx = PS4.LStickX() / 4.0; float Ly = PS4.LStickY() / 3.0; ik(-Lx, height + Ly); lastLStickX = currentLStickX; lastLStickY = currentLStickY; } } disableCore0WDT(); } } void setup() { pinMode(32, INPUT_PULLUP); pinMode(33, INPUT_PULLUP); pinMode(25, INPUT_PULLUP); pinMode(26, INPUT_PULLUP); pinMode(27, INPUT_PULLUP); pinMode(14, INPUT_PULLUP); Serial.begin(115200); Serial.println("-----------------------------"); uint8_t btmac[6]; esp_read_mac(btmac, ESP_MAC_BT); Serial.printf("[Bluetooth] Mac Address = %02X:%02X:%02X:%02X:%02X:%02X\r\n", btmac[0], btmac[1], btmac[2], btmac[3], btmac[4], btmac[5]); //パラメータ初期値取得 preferences.begin("parameter", false); angleOffset0 = preferences.getFloat("angleOffset0", angleOffset0); angleOffset1 = preferences.getFloat("angleOffset1", angleOffset1); velP = preferences.getFloat("velP", velP); velI = preferences.getFloat("velI", velI); velLimit = preferences.getFloat("velLimit", velLimit); angleP = preferences.getFloat("angleP", angleP); angleI = preferences.getFloat("angleI", angleI); angleD = preferences.getFloat("angleD", angleD); // Encoder Settings I2Cone.begin(19, 18, 400000UL); // AS5600_M0 I2Ctwo.begin(23, 5, 400000UL); // AS5600_M1 sensor0.init(&I2Cone); sensor1.init(&I2Ctwo); //Connect the motor object and the sensor object motor0.linkSensor(&sensor0); motor1.linkSensor(&sensor1); // Drive Settings driver0.voltage_power_supply = 12; driver0.init(); motor0.linkDriver(&driver0); driver1.voltage_power_supply = 12; driver1.init(); motor1.linkDriver(&driver1); // Current Limitation motor0.current_limit = Ilimit; motor1.current_limit = Ilimit; // Voltage Limitation motor0.voltage_limit = Vlimit; motor1.voltage_limit = Vlimit; // Current Sensing current_sense0.init(); motor0.linkCurrentSense(¤t_sense0); current_sense0.linkDriver(&driver0); // current sense init and linking current_sense1.init(); motor1.linkCurrentSense(¤t_sense1); current_sense1.linkDriver(&driver1); // Control loop // Other modes TorqueControlType::voltage TorqueControlType::dc_current motor0.torque_controller = TorqueControlType::foc_current; motor0.controller = MotionControlType::angle; motor1.torque_controller = TorqueControlType::foc_current; motor1.controller = MotionControlType::angle; // FOC current control PID parameters motor0.PID_current_q.P = currentP; motor0.PID_current_q.I = currentI; motor0.PID_current_d.P = currentP; motor0.PID_current_d.I = currentI; motor0.LPF_current_q.Tf = currentTf / 1000.0; // 1ms default motor0.LPF_current_d.Tf = currentTf / 1000.0; // 1ms default motor1.PID_current_q.P = currentP; motor1.PID_current_q.I = currentI; motor1.PID_current_d.P = currentP; motor1.PID_current_d.I = currentI; motor1.LPF_current_q.Tf = currentTf / 1000.0; // 1ms default motor1.LPF_current_d.Tf = currentTf / 1000.0; // 1ms default // Speed loop PID parameters motor0.PID_velocity.P = velP / 10.0; motor0.PID_velocity.I = velI; motor0.PID_velocity.D = 0; motor1.PID_velocity.P = velP / 10.0; motor1.PID_velocity.I = velI; motor1.PID_velocity.D = 0; motor0.LPF_velocity.Tf = 0.0; motor1.LPF_velocity.Tf = 0.0; //Angle PID Setting motor0.P_angle.P = angleP; motor0.P_angle.I = angleI; motor0.P_angle.D = angleD; motor1.P_angle.P = angleP; motor1.P_angle.I = angleI; motor1.P_angle.D = angleD; // Speed Limit motor0.velocity_limit = velLimit; motor1.velocity_limit = velLimit; motor0.voltage_sensor_align = 0.5; motor0.zero_electric_angle = 2.14; motor0.sensor_direction = Direction::CCW; // CW or CCW motor1.voltage_sensor_align = 0.5; motor1.zero_electric_angle = 2.94; motor1.sensor_direction = Direction::CCW; // CW or CCW // monitor Interface Settings // comment out if not needed motor0.useMonitoring(Serial); motor1.useMonitoring(Serial); //core0 xTaskCreatePinnedToCore( web , "web" // A name just for humans , 4096 // This stack size can be checked & adjusted by reading the Stack Highwater , NULL , 1 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest. , NULL , 0); //Motor initialization motor0.init(); // align encoder and start FOC motor0.initFOC(); motor1.init(); // align encoder and start FOC motor1.initFOC(); } void loop() { motor0.loopFOC(); motor1.loopFOC(); motor0.move(-PI + (angle0 + angleOffset0) / 180.0 * PI); motor1.move(-PI - (angle1 + angleOffset1) / 180.0 * PI); } //逆運動学の計算 void ik(float x, float z) { float th1, th2, th1d, th2d, ld, phi; //z = constrain(z, 0.0, 140.0); ld = sqrt(x * x + z * z); th1d = acos(ld / (2 * L)); th2d = acos((2 * L * L - ld * ld) / (2 * L * L)); phi = atan2(x, z); th1 = (phi + th1d) * 180.0 / PI; th2 = (PI - th2d) * 180.0 / PI - th1; th1 = constrain(-(th1 - 45.0) * 5.6, -80.0, 120.0); th2 = constrain(-(th2 - 45.0) * 5.6, -80.0, 120.0); if (isnan(th1) != 1) angle0 = th1; if (isnan(th2) != 1) angle1 = th2; } |
創刊号のFOC回転位置制御Arduinoコードとの差分のみ説明します。
L. 39 L = 70.0 下腿、大腿の長さを指定 (70.0mm)
L. 40 足先の初期高さを99mmと指定
初期の足の角度を45°とするため ($\sqrt{2} × 70 \approx 99$)。
L. 48 電流リミットを2Aから6Aにしてモータトルクを向上させます。
電源は十分電流能力があるものを使用ください
L. 356~369 PS4コントローラ 左ジョイスティック動作
上下に加えて前後も指定してIKで足を動かします。
L. 493~498 モータ初期設定
モータ回転方向とエンコーダオフセット値は前回の測定値を入力してください。
|
1 2 3 4 5 6 |
motor0.voltage_sensor_align = 0.5; motor0.zero_electric_angle = 2.14; motor0.sensor_direction = Direction::CCW; // CW or CCW motor1.voltage_sensor_align = 0.5; motor1.zero_electric_angle = 2.94; motor1.sensor_direction = Direction::CCW; // CW or CCW |
L. 539~556 逆運動学の計算 ik(x, z)
足先の前後:xと高さzを指定してモータの角度を算出しています。
L. 551, 552 下腿や大腿の初期角度を45°として(ギア比5.6で換算)、
モータは-80°~120°までの回転で制限しています (干渉による過電流防止)。
ブラウザアプリ動作やPS4コントローラ接続については創刊号と全く同じです。
動作
Arduinoコードを書き込んでPS4コントローラと接続すると、左ジョイスティックで前後上下に足が動きます。
予算3万円でつくる BLDC 2足歩行ロボット
足のIKを楽しむ pic.twitter.com/6gKO0acqjX— HomeMadeGarbage (@H0meMadeGarbage) September 2, 2025
以上でIKによる足制御ができるようになりました。
演習問題
1-パラメータ調整
IKのコードでブラウザアプリやコードを修正するなどして各PIDパラメータ値を変更して動作にどう影響するのか体験してみよう。
電流リミットは6A以上にすると過電流でMKS ESP32 FOC V2.0のパワートランジスタが壊れる可能性がありますのでご注意ください。
2-ジャンプ動作
ここではPS4コントローラのジョイスティックでのIKを楽しみましたが
コードを改良してボタンを押すとジャンプするようにしてみましょう。
ik(x, z)関数でジャンプ動作のシーケンスを組んでみましょう。
おわりに
本号ではロボットの足を完成させて、IKによる制御を楽しみました。
モータ角度ではなく足の位置での制御が可能になるとより豊かな動作が実現できるようになります。
次回はロボットの股関節を製作し動作を楽しみたいと思います。