私のチェビシェフリンク学習
本記事にはアフィリエイト広告が含まれます。
今回はリンク機構の一種であるチェビシェフリンクについて勉強しましたので報告いたします。
リンク機構につきましては、以前 平行リンクでロボット歩行の検討を実施しております。
私自身はこういった機構については想像が及ばず実際に動かしてみないと理解ができません。昔から幾何学が苦手です。地図もうまく読めません。
ここでもチェビシェフリンクを実際に動かして学びました。
目次
チェビシェフリンク
Twitterで面白い歩行ロボットをみつける。
100均の毛玉取りで釣り糸を使ったリモコンロボを作りました。これでヘボコンにも出られそう。#毛玉取りロボット #糸コンロボ #100円ロボット部 #チェビシェフリンク #リモコンロボット pic.twitter.com/4pY1zeOPV4
— 片山 均@八幡浜の三瀬医院 (@katabomb2) September 24, 2022
#NT金沢 に私と一緒に出展するJunpeiK君のチェビシェフリンク歩行ロボットです。
結構ダイナミックな動きですね。 pic.twitter.com/MQadSF71iO— てーもん (@temon_cs12a) June 22, 2021
すごい生き物感!
チェビシェフリンクという機構らしい。
ということで勉強してみよう。
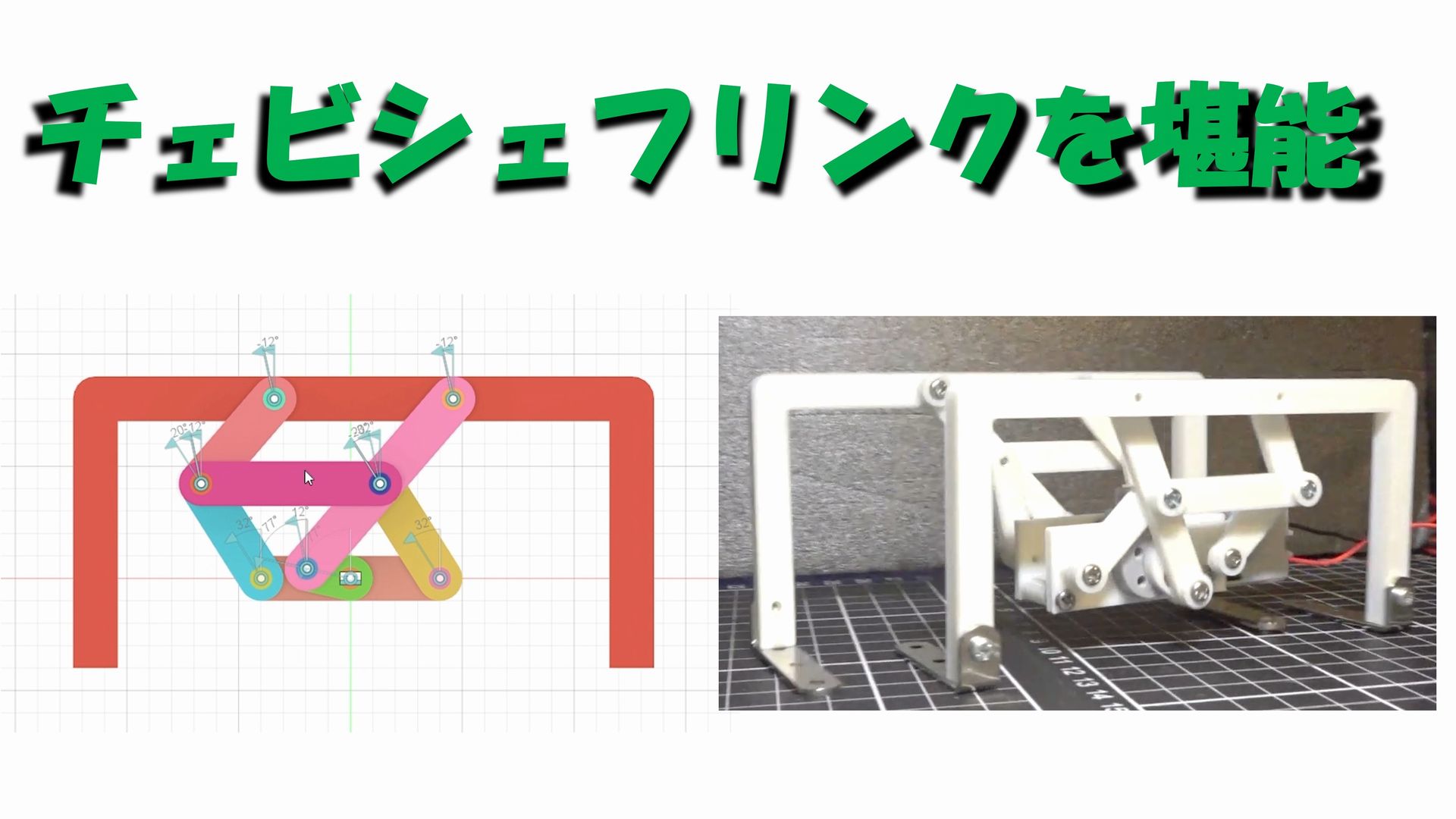
Fusion360で学習
以下を参考にチェビシェフリンクをFusion360で動かしてみました。
プチ電車で動くチェビシェフリンク機構を使った4脚歩行ロボット
これがチェビシェフか
すげぇ pic.twitter.com/qiJAzvvnLo— HomeMadeGarbage (@H0meMadeGarbage) January 31, 2023
面白い!
円運動が直線運動に変換されています。さらに半円状に位置を戻す際の速度が速くなる点も凄い!
これが生物っぽい動作が産み出される要因でしょうか。
さらに平行リンクと合わせて足を構築してみます。
こいつはいいや pic.twitter.com/O73GbApAHA
— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2023
チェビシェフリンクによる運動を平行リンクで回転起点の下部に移動させています。
めっちゃ足っぽい。やはりこの平行移動が魅力的ですね。
参考
チェビシェフリンクの具現化
チェビシェフリンクの魅力をソフトによって理解ができましたので、実際に作ってみます。
Fusion360で設計した足を3Dプリントして、タミヤのギアボックスで動かしてみました。
チェビシェフリンク
これは私の生活を豊かにしてくれる機構かもしれない#TAMIYAタミヤ 楽しい工作シリーズ No.245 ミニモーター 薄型ギヤボックス(2速) 70245 https://t.co/aJOO0I012s pic.twitter.com/pS8nz9a7yC
— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2023
[amazonjs asin=”B0937PVWXZ” locale=”JP” title=”タミヤ 楽しい工作シリーズ No.245 ミニモーター 薄型ギヤボックス(2速) 70245″]
いい感じ。
実物でも生き物感がでたww
平行シンクと合わせて歩行もしてみました。
チェビシェフリンク
かっこいい
胴体ブレないのがいい#TAMIYA pic.twitter.com/z63V09pzXP— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2023
チェビシェフリンクによって胴体が全くブレていません。
こいつはいいや!