ジャンピング倒立振子をつくりたい2
本記事にはアフィリエイト広告が含まれます。
前回はジャンピング倒立振子の検討を開始して、足駆動にQDD Robstride 05、ホイール駆動にBLDC (SimpleFOC) を採用した機体を製作しました。
ここではより高いジャンピング性能を目指して進めていきます。

目次
足前後制御
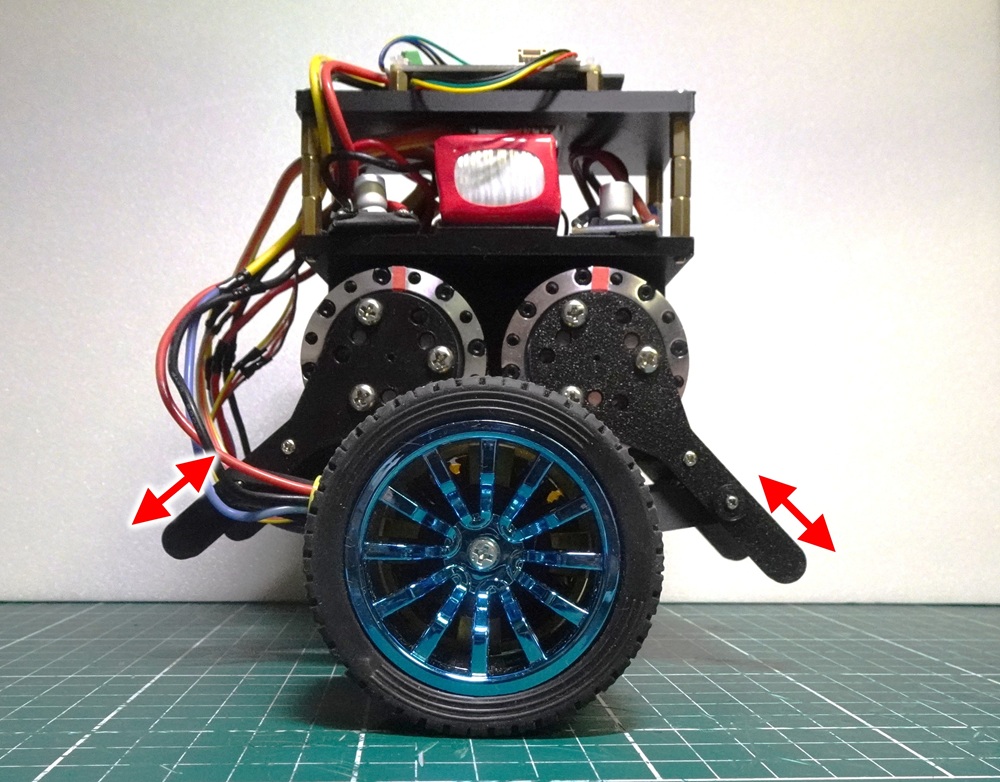
機体を常に水平に保持するためにホイール位置を前後させるようにしました。
(前回までは倒立目標角を変動させて極力水平を維持するようにしていた)
倒立振子 機体水平保持
目標角シフトから足前後シフト方式に変更まだ制動が甘いのとジャンプとの兼ね合いも考えないといけないが
実に生き生きとした動作を実現 pic.twitter.com/FhZLPYTmrZ— HomeMadeGarbage (@H0meMadeGarbage) March 26, 2026
ホイール位置を足で前後させることで坂でも機体の水平を維持しています。
IMUでセンスした機体傾斜角を積算させて緩やかに位置を制御させています (いわゆるI制御)。
段差ジャンプ動作検討
段差 (AKIRA 3巻) をジャンプします。
う うーん。。
もっと高く飛べないとな pic.twitter.com/lWRKfQMmiw— HomeMadeGarbage (@H0meMadeGarbage) March 26, 2026
着地は論外ですが、ジャンプ高さも少し足りてないようす。。。
足の屈伸幅を拡げてジャンプ高さを稼ぎます。
屈伸幅増やして高度を稼いでみたけど
着地頑張らないとな
ウェイトシフト詰めますかぁ pic.twitter.com/dLVzL12mDw— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2026
ジャンプ量はいい感じになりました。
あとは着地ですね。。。
着地検討
ジャンプ高さは申し分ないので(機体性能的に限界)、着地精度を向上させます。
まず足前後制御が着地時に寄与できていない様子だったので、I制御からPID制御にして応答性を向上させました。
足前後シフトをI制御からPID制御に変更してよりドラスティックに
より生き生きして楽しみが増えそう pic.twitter.com/47FtAC5KAI— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2026
かなりドラスティックにホイール位置が変動するようになりました。
生き生きしています。
更に転びにくくするために足アームを延長しました。
ちょっと消極的な対応なんだけど転びたくないのよ。
上記対策を施して再度ジャンプ実験
倒立振子ジャンプ
着地成功 pic.twitter.com/fnj5oZMoDq— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2026
大成功!!!
見事に着地できました!
あとは記録を伸ばすのみ
段差ジャンプ着地が成功できたので、段差の高さを増して記録を更新させます。
AKIRA 5巻
AKIRA5巻越えはヤバいよね pic.twitter.com/dTEGxdtDpr
— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2026
クリア!
AKIRA 6巻
AKIRA 6巻を超えるまでになりました
私は成長しました pic.twitter.com/gKQvdnhFZl— HomeMadeGarbage (@H0meMadeGarbage) March 28, 2026
クリア!
段差 AKIRA 6巻 はもう優勝でしょ。
おわりに
ここではジャンピング倒立振子の段差ジャンプについて検討しました。
制御や機体つくりに工夫を凝らして、見事段差ジャンプ着地を成功させることができました。
生まれて初めて段差をジャンプできる倒立振子を製作することができました。
今回は一脚の足構成で機体を構築しましたがQDDを買い足して2脚構成でも検討を楽しんでみたいと思っています。