シリアルサーボで足製作 -シリアルサーボと距離を詰めたい俺3-
本記事にはアフィリエイト広告が含まれます。
前回はシリアルサーボ (KRS3301)を用いてロボットアームを製作しました。
ここでは いよいよ足の作製に挑戦したいと思います。
目次
足製作
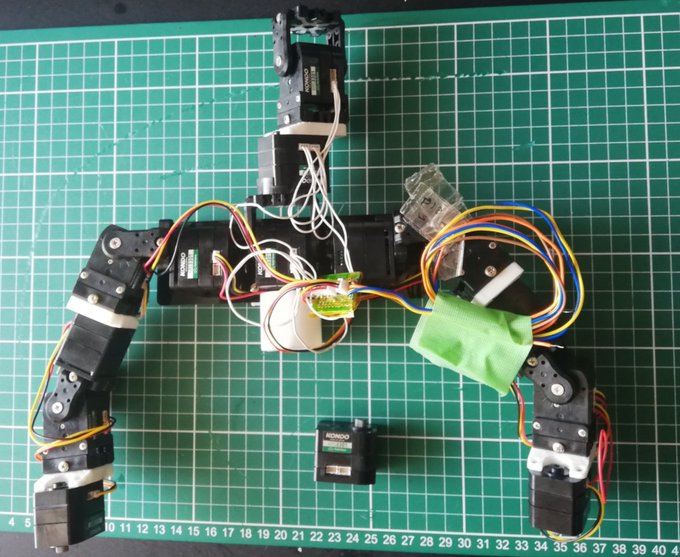
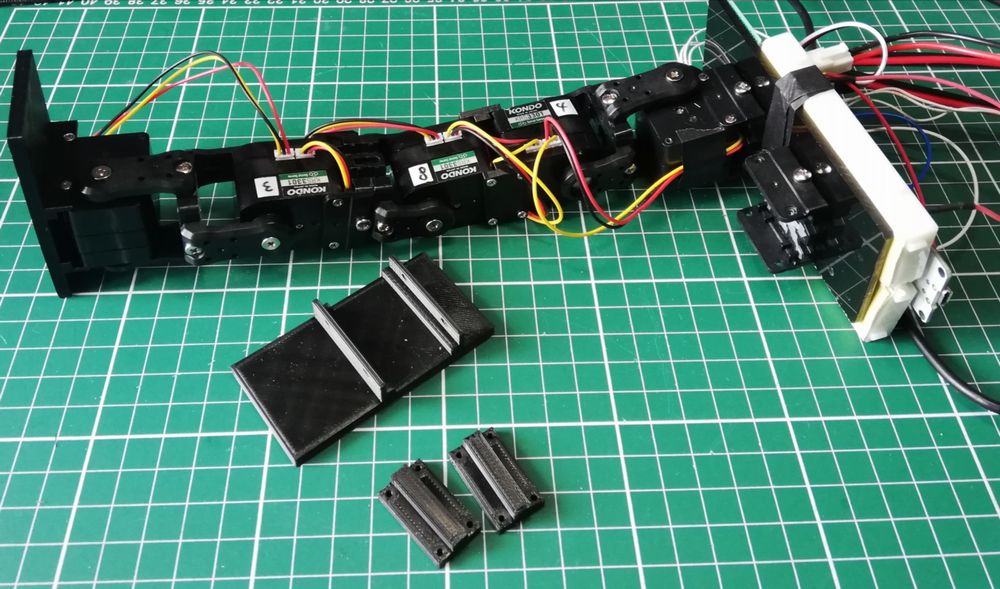
まずは5個のサーボで片足を構築してみました。
片足出来た pic.twitter.com/5p5Fwwrfj5
— HomeMadeGarbage (@H0meMadeGarbage) January 2, 2022
公式のサーボアームと3Dプリンタで出力したオリジナル治具で作りました。
両足製作に際して足りなくなったサーボアームは以下で購入

重心移動
両足が完成しました。
両足出来た pic.twitter.com/IvgOmtAC6t
— HomeMadeGarbage (@H0meMadeGarbage) January 7, 2022
構成は以下の通り、両足で10個のシリアルサーボを使用しました。
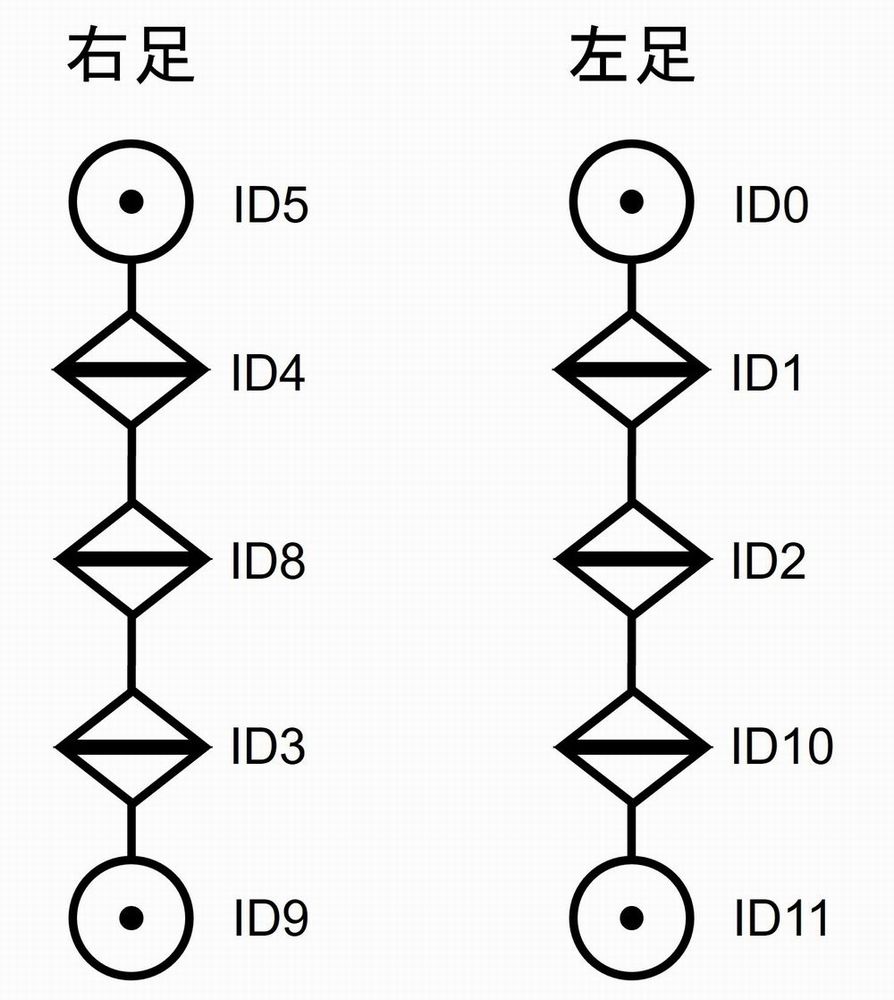
両足の1番上と一番下のサーボを同じ角度で動かすと天板が常に水平に保たれたまま、重心移動が可能です。
上の動画では重心移動を直線的なサーボ角度変化で実施しました。
以下ではサーボの角度を正弦波形で変更しました。
重心移動を正弦波でマイルドに pic.twitter.com/FGTLKx7d8C
— HomeMadeGarbage (@H0meMadeGarbage) January 7, 2022
方向転換時の加速度が低減され非常にスムーズに重心移動できています。
屈伸
続いて屈伸動作を実現させます。
製作した足はひざ上の大腿部とひざ下の下肢の長さを同じにしていますので、
重心を垂直に上下させる屈伸時の足の曲げの関係は以下の通りになります。
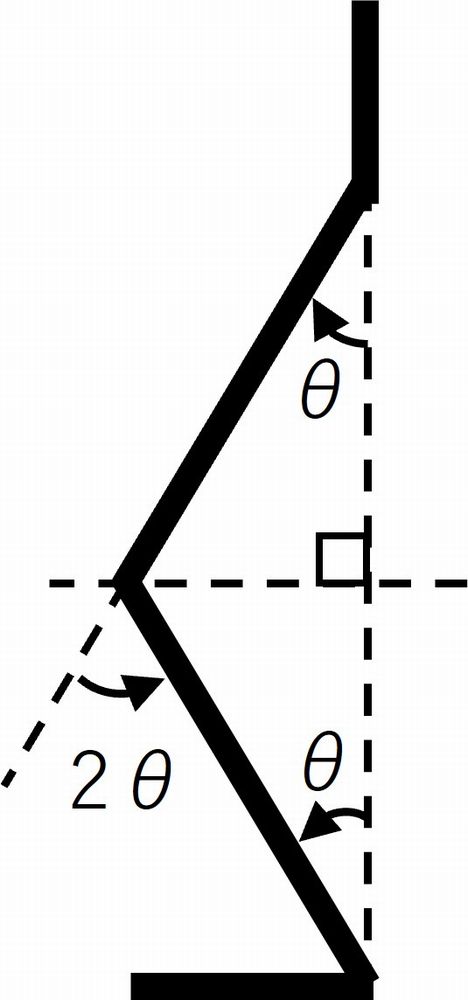
上の関係を保持しつつ重心移動と同様に正弦波形で角度を変えて屈伸させてみました。
— HomeMadeGarbage (@H0meMadeGarbage) January 7, 2022
参考
- ROBO‐ONEのための二足歩行ロボット製作ガイド
- ROBO-ONEにチャレンジ! 二足歩行ロボット自作ガイド
おわりに
ここではシリアルサーボを用いて足を製作しました。
製作後に実際に動かしてみて、反復運動での方向転換時の加速度の影響などを実感として理解することができました。
マイルドな制御が大事でございますね。
ここまで来たら歩かせたいので勉強を進めます。
また次回お会いいたしましょう。