製作物の修理&メンテナンス
本記事にはアフィリエイト広告が含まれます。
私は思いついたら過去の製作物からでもガンガン部品をとって、新たな何かを作っていくスタイルでございます。
直近の製作物も後先考えずに壊してしまうので、後で冷静になった時に後悔することも少なくないです。。
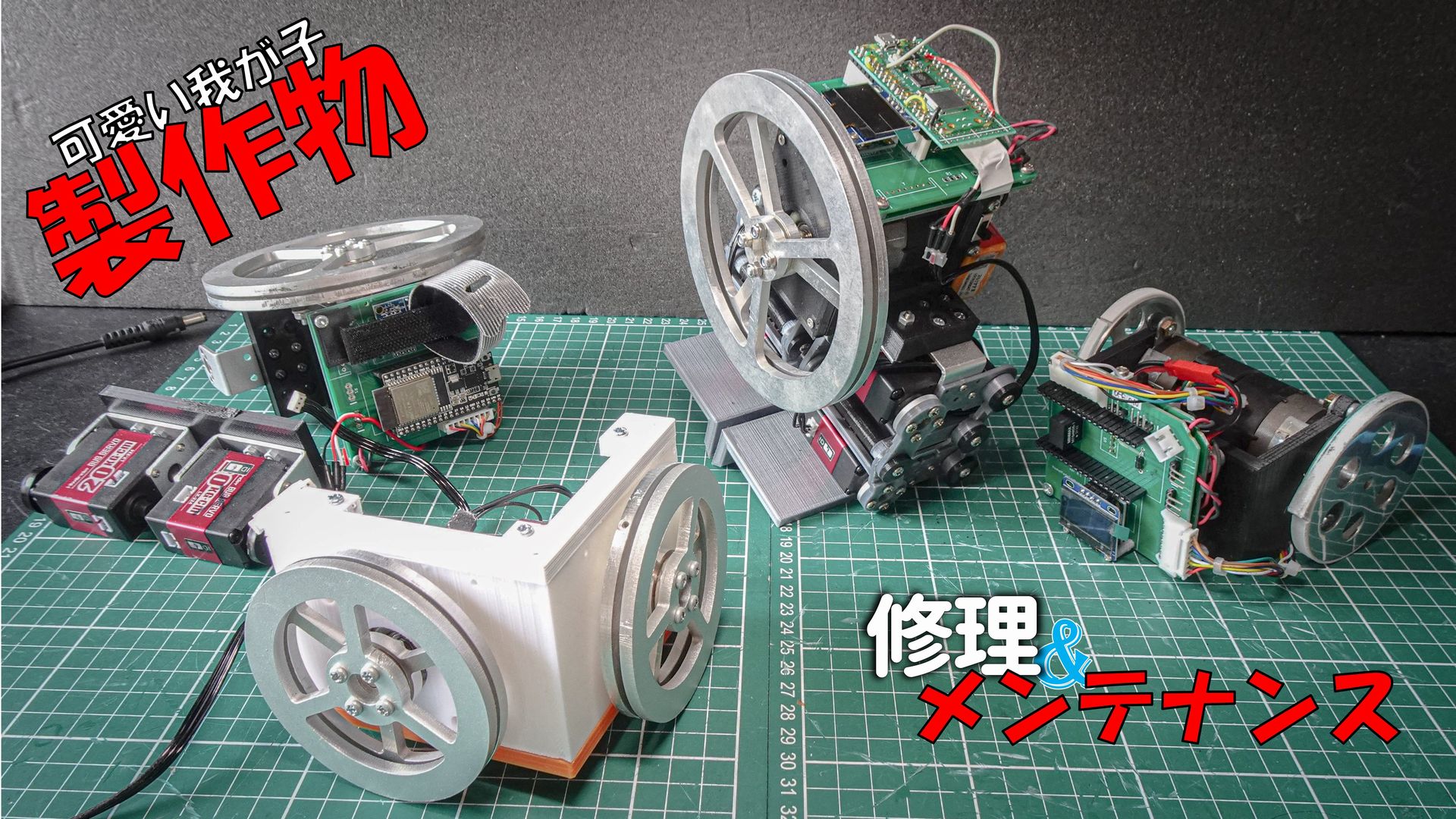
今年も毎年恒例の自作の展示会HomeMadeGarbage the GARAGEに向けて、製作物の修理とメンテナンスをおこないました。
the GARAGE 2023にむけて
部品流用して色々作るがためにジャンクみたいになっちゃたのをちゃんと治す。・倒立振子
・SHISEIGYO-2 Walker 改
・SHISEIGYO-1 Walker 改SHISEIGYO-1 Walker 改 はサーボの選択から改めたい#HMGG2023 pic.twitter.com/hLN7070ofb
— HomeMadeGarbage (@H0meMadeGarbage) May 18, 2023
目次
ブラシレスモータ 倒立振子
SHISEIGYO-2 Walker 改のコントロール基板を用いてブラシレスモータ倒立振子を製作したので、
倒立振子専用の基板を新たに製作しました。
ブラシレスモータ 倒立振子
コントロール基板を専用に作りおこしたので安心して一生使える pic.twitter.com/QOP5A2bnke— HomeMadeGarbage (@H0meMadeGarbage) May 18, 2023
SHISEIGYO-2 Walker 改
ブラシレスモータ倒立振子に流用していたコントロール基板が返ってきましたのでSHISEIGYO-2 Walker 改 を復活させます。
足はタイムくんに流用していたのでこちらも取り返します。
コントロール基板と足を取り返したので SHISEIGYO-2 Walker 改 を復活させることができました。
SHISEIGYO-2 Walker 改 復活#電子工作 pic.twitter.com/b5WGfco2PG
— HomeMadeGarbage (@H0meMadeGarbage) May 18, 2023
SHISEIGYO-1 Walker 参 改
上記修理によって 1軸のリアクションホイール機構が残りましたので、SHISEIGYO-1 Walker 参 改 の復活を目指します。
さて足のない こいつらをどうするか pic.twitter.com/IpLsdPDFCw
— HomeMadeGarbage (@H0meMadeGarbage) May 18, 2023
ただ復活させるものなんですので、サーボを従来のLX-224から変更してみようと思います。
自身の中で部品の手駒を増やしておくことは今後の人生において有用であると考えたためです。
Feetech SCS15
ここではシリアルサーボSCS15を使用してみることにしました。高トルクであるにも関わらず非常に安価です。

製品表記には電源電圧6Vまでとありますが、7.4Vを印可しても問題ないとのことです (中の人に確認させていただきました)。
Yes, it's ok
— Abby (Feetech Servo) (@Abbyhong3) May 19, 2023
早速動作確認 7.4zV印可でも問題なし
シリアルバスサーボ入手
FEETECH SCS15要テスト pic.twitter.com/xY20JQ3zvR
— HomeMadeGarbage (@H0meMadeGarbage) May 24, 2023
片足製作
SCS15を用いて足を組みました。
Txのみ直結でリンク機構の足 味見
直結だと動きもたつく
UART-1Wire変換回路つくらないといけませんね。 pic.twitter.com/wX5KTHHJ9z— HomeMadeGarbage (@H0meMadeGarbage) May 24, 2023
サーボの信号線にマイコンUARTの送信のみを接続するだけでは動作がもたつきます。
これはFeetechシリアルサーボを使用して製作した倒立振子の時にも確認した現象で、UART-1Wire変換してUARTの受信線も接続する必要があります。
ということでUART-1Wire変換回路を製作しました。
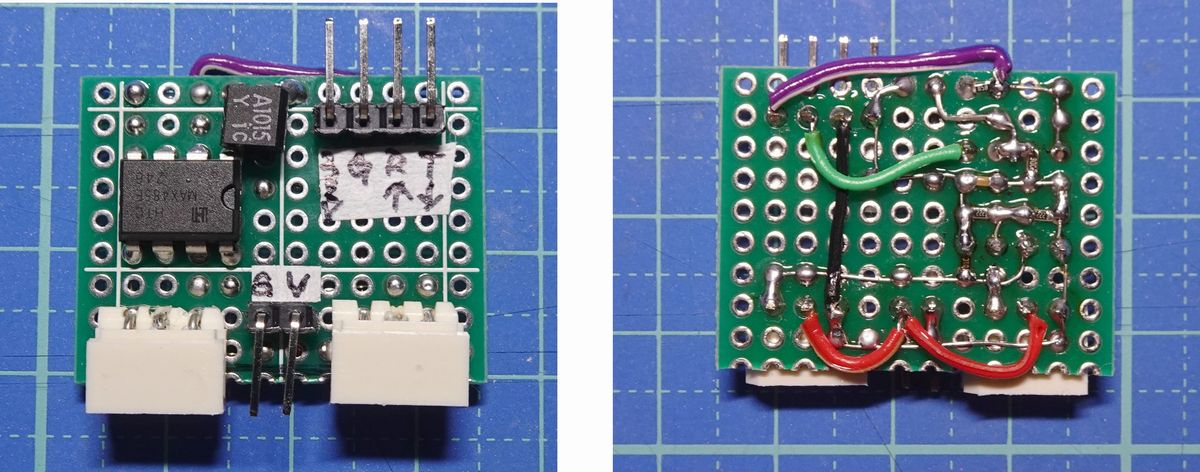
UART受信線も接続することでスムーズな動作が実現されました。
FEETECH SCS15 で足製作 pic.twitter.com/KtSFRjGypb
— HomeMadeGarbage (@H0meMadeGarbage) May 27, 2023
FEETECHの公式ライブラリを使用しているためにUARTの受信接続が必須となりますが、送信のみにファームを改造することも可能だと思います。
ただ今後フィードバックも使用する可能性が高いので今後もFEETECHシリアルサーボを使用する際にはUART-1Wire変換回路を用いる所存です。
両足製作
製作したUART-1Wire変換回路は2個のサーボケーブル接続が可能です。
もう片方の足も製作
シリアルバスサーボ FEETECH SCS15
もう片方の足ができた pic.twitter.com/4hGE96A6Q9— HomeMadeGarbage (@H0meMadeGarbage) May 25, 2023
問題なさそうなので足を作り進めます。いい感じでございます。
ステップ pic.twitter.com/Op9woB22t2
— HomeMadeGarbage (@H0meMadeGarbage) May 25, 2023
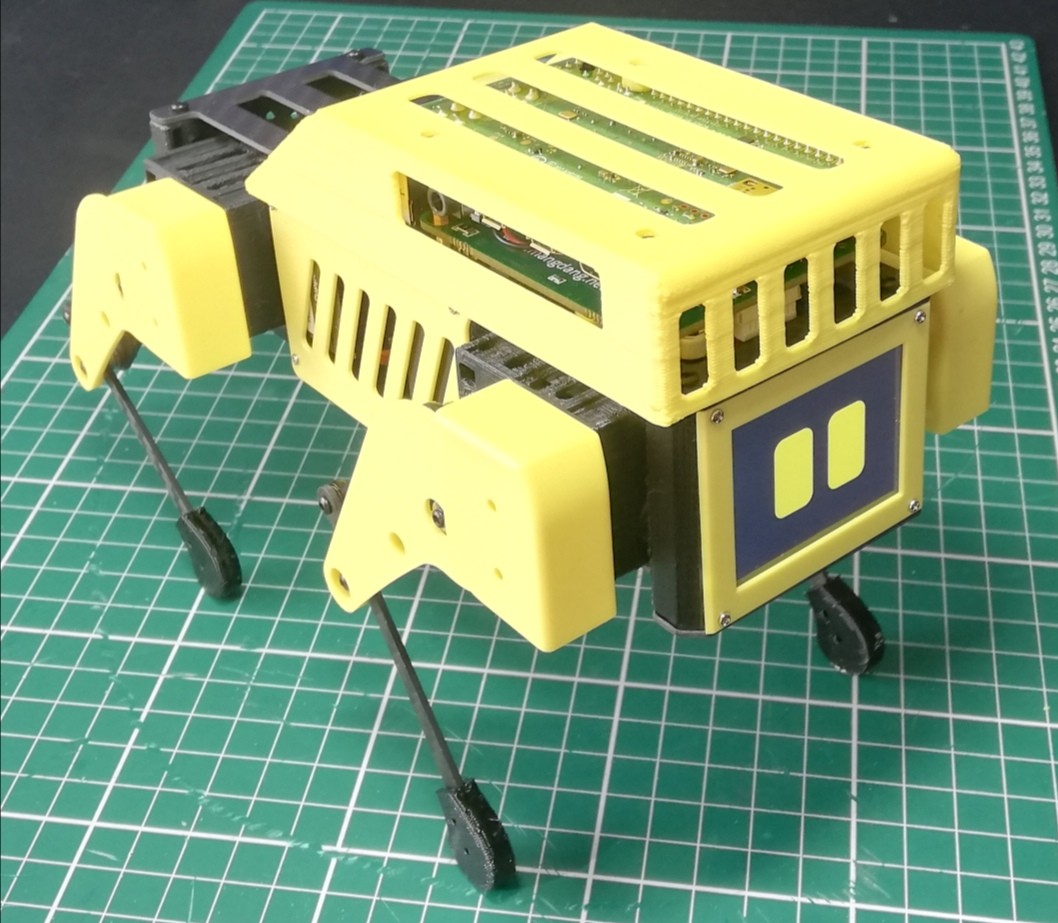
完成
FEETECH版の二足歩行ロボット SHISEIGYO-1 Walker 参 改 が完成しました。
おわりに
ここでは自作の展示会に向けて製作物の修理・メンテナンスを実施しました。
これによって3機種の作品が復活いたしました。
前回の HomeMadeGarbage the GARAGE 2022 からこれまでに既に10個以上の作品を製作しておりますので今年の展示会も盛りだくさんになりそうで楽しみです。