BLE NanoでDCモータ制御 w/ Android -球体POV製作への道 その3-
 お父ちゃん
2016.7.26
お父ちゃん
2016.7.26
本記事にはアフィリエイト広告が含まれます。
さて随分あいだがあいてしまいましたがPOV再開です。
前回ステッピングモータを使用してみたのですが全然スピード出なかったので方針変更して
- DCモーターのスピードをBLE Nano介してスマホでコントロール
- フォトリフレクタで回転スピード検出
で行こうと決め実行しました!
目次
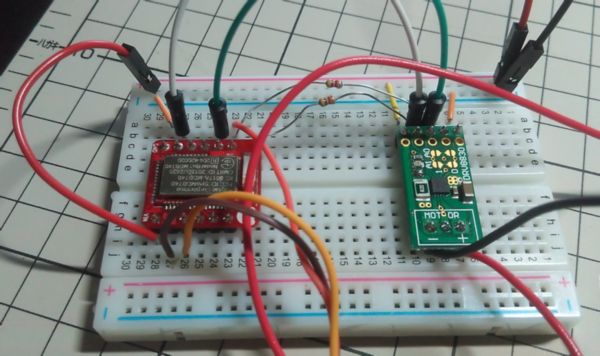
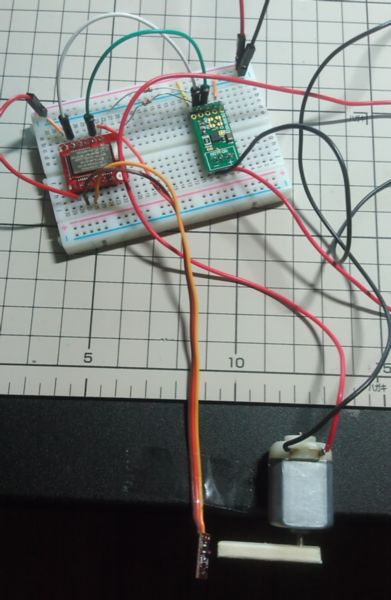
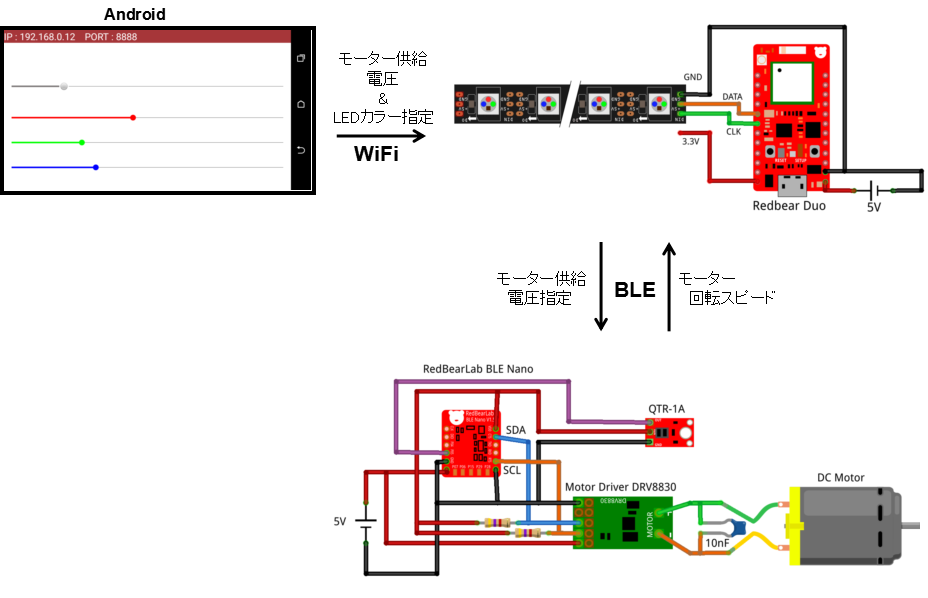
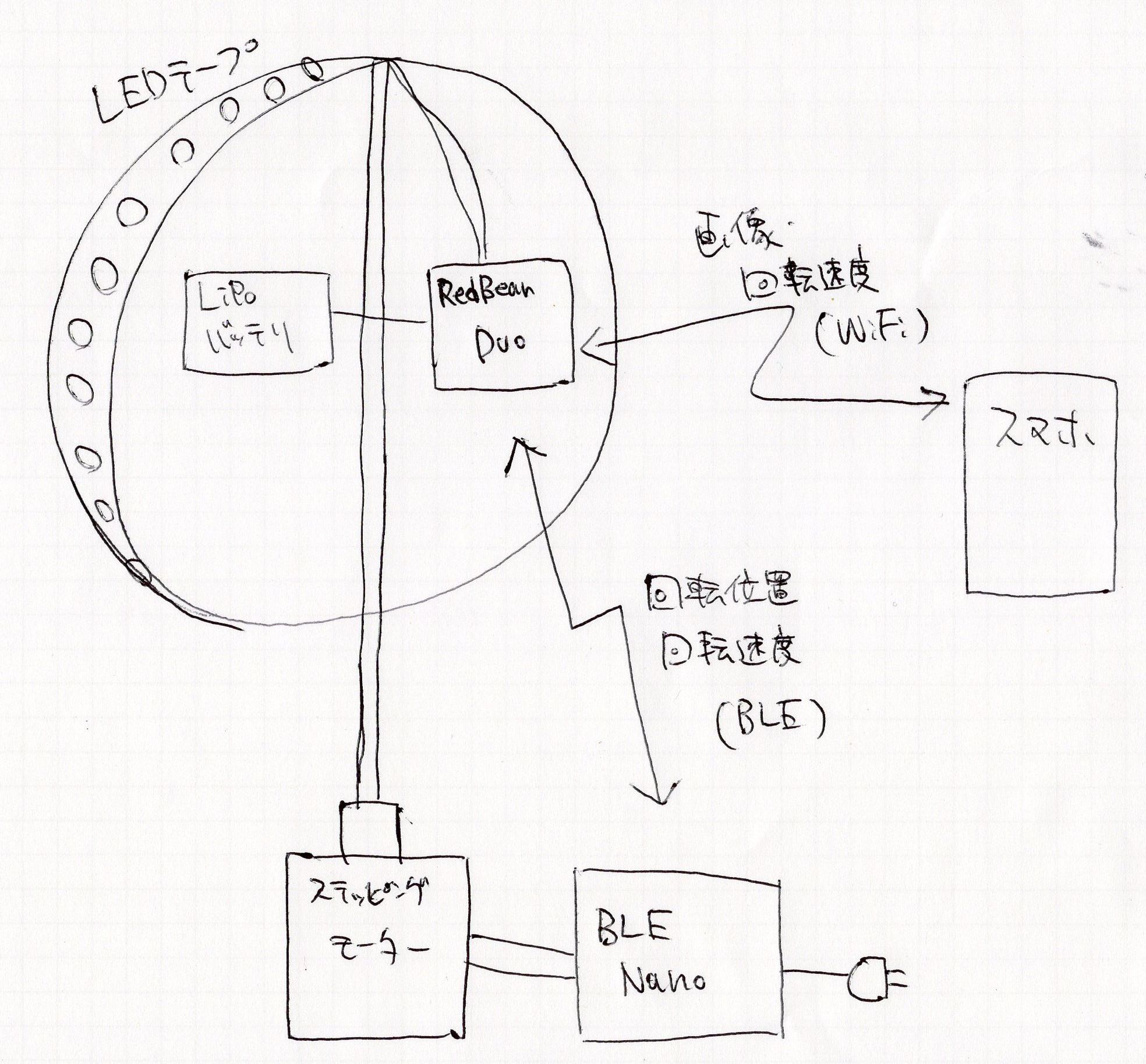
全体概要
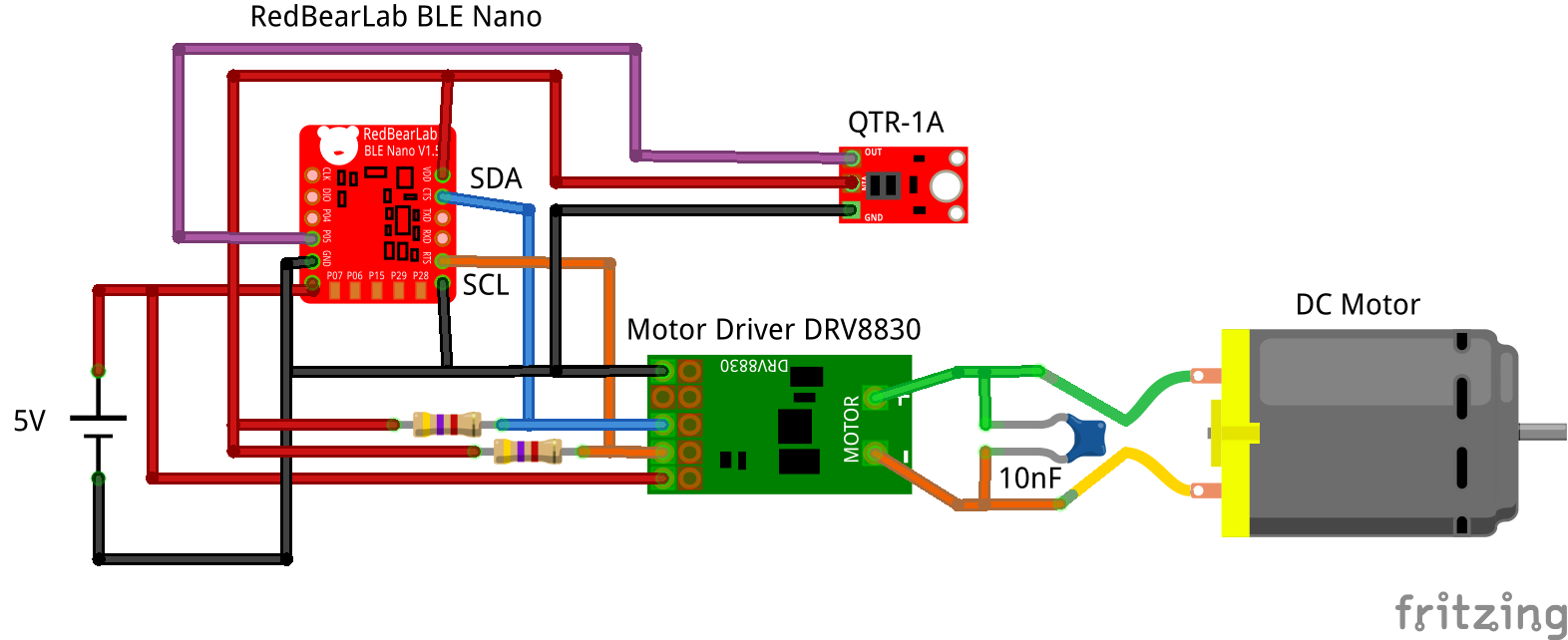
部品
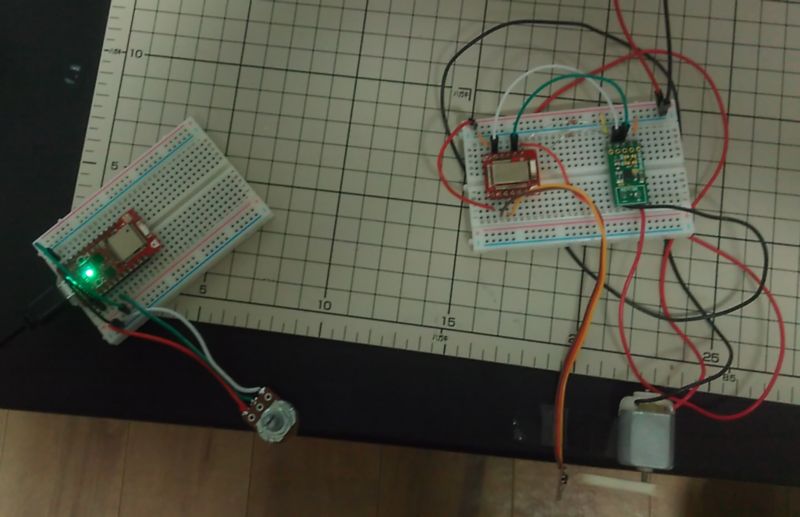
動作
BLE介してスマホのスライダでDCモーターへの供給電圧を0.5~3.0Vまで変化させ回転スピードを制御してます。
モータの羽(割り箸)付近にフォトリフレクタを配置し回転スピードを計測してます。スマホには一周あたりにかかる時間[usec]が表示されてます。
回転スピード計測
 POV表示させるためには回転位置を把握する必要があるので位置検出にフォトリフレクタを採用しました。
POV表示させるためには回転位置を把握する必要があるので位置検出にフォトリフレクタを採用しました。
全然関係ないけど赤外線ってスマホカメラでみると紫色にみえるよね。この前炭火焼きハンバーグ屋さんで炭撮ろうとしたら紫色に輝いてた。
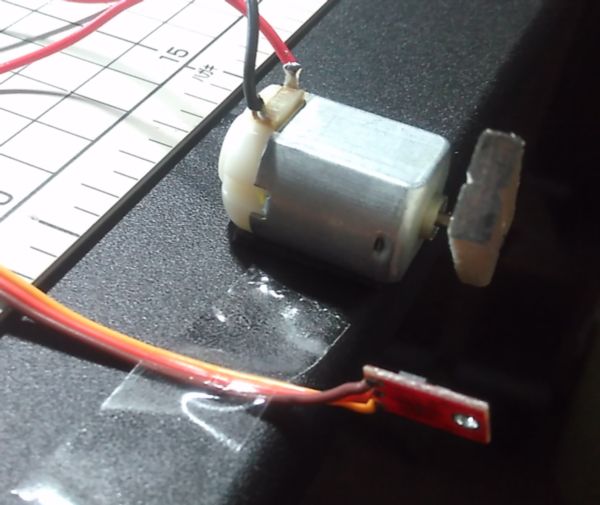
どれほど効果あるかは不明ですがモーターの羽に使ってる割りばしの先を黒く塗ってますww 羽がフォトリフレクタを通過するとカウント開始し次の通過までの時間を測定します。
フォトリフレクタ QTR-1A
2個で550円。安い!Arduino用ライブラリは以下に。
https://github.com/pololu/qtr-sensors-arduino
POV表示の際には2個もしくは4個のフォトリフレクタ使って回転位置検出しようと考えています。
あとモーターもちゃんとしたの選定しないと。。。
ステップ1まとめ
とりあえず無線で回転制御の第一歩は出来ました。
ステップ2では
RedBear DuoとBLE Nano間での通信を確立し、Duo側から回転制御できるようにしようと思います。
えい!えい!おー!
次の記事

関連記事
 BLE Nano – Redbear Duo間通信でモータ制御 -球体POV製作への道 その4-
BLE Nano – Redbear Duo間通信でモータ制御 -球体POV製作への道 その4-
 BLE Nano – Redbear Duo間通信でモータ&LED制御 w/ Android -球体POV製作への道 その6-
BLE Nano – Redbear Duo間通信でモータ&LED制御 w/ Android -球体POV製作への道 その6-
 球体POV製作への道 その1
球体POV製作への道 その1
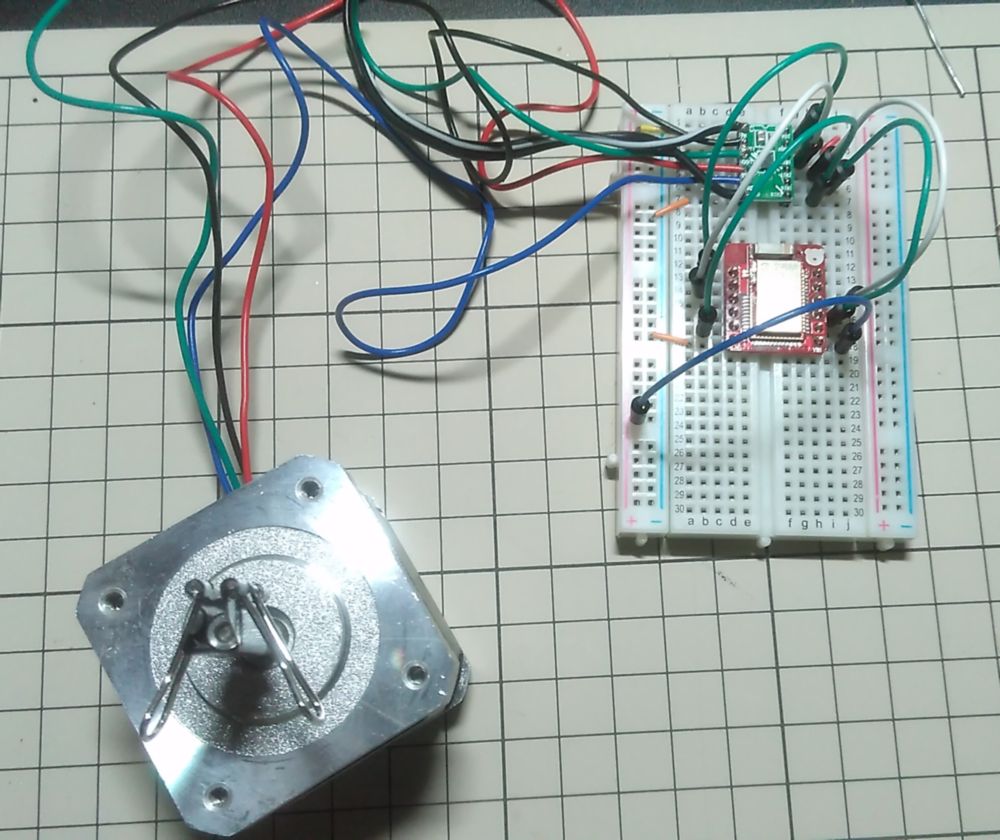 BLE Nanoでステッピングモータ制御 -球体POV製作への道 その2-
BLE Nanoでステッピングモータ制御 -球体POV製作への道 その2-
 Redbear DuoでDotstarを制御 -球体POV製作への道 その5-
Redbear DuoでDotstarを制御 -球体POV製作への道 その5-
 ESP32 & BLINK で Dotstar制御 -球体POV製作への道 その8-
ESP32 & BLINK で Dotstar制御 -球体POV製作への道 その8-
 姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
 球体POVつくってみた -球体POV製作への道 その10-
球体POVつくってみた -球体POV製作への道 その10-