二足歩行ロボット 探訪
本記事にはアフィリエイト広告が含まれます。
X (旧Twitter) にて面白いロボットを目にし、改めて二足歩行ロボットを調査・製作してみたくなりました。
すごい
是非自身でも味わってみたい https://t.co/yyYmiCv1Br— HomeMadeGarbage (@H0meMadeGarbage) October 2, 2023
目次
考察と方針
コチラのロボット 二本足で巧みにバランスをとっていて非常に興味深いです。
足の着地位置やロール軸による重心シフトでのバランス制御が素晴らしいです。
New LIMX Dynamics robot at #IROS2023. Apparently it has a ROS interface. pic.twitter.com/C2HCmrkjdy
— Open Robotics (@OpenRoboticsOrg) October 3, 2023
更に私が着目したのが、スムーズな足上げです。
他方の着地の勢いを利用するとともに、すこし機体を跳ね上げてから足を上げているように感じました。
足上げ前の跳ね上げの効果を自身で味わってみたく二足歩行ロボットの検証を進めることにいたしました。

足製作
ある程度のトルクとスピードが必要になると考え、手元にあったシリアルサーボ KRS3301を利用することにしました。
KRS3301を片足で2個使用して上下前後動作させることを想定
サーボ動作テストはなんなくクリア
まーた なんかしようとしてら pic.twitter.com/bj2HhKo216
— HomeMadeGarbage (@H0meMadeGarbage) October 5, 2023
この時点で足を点接地型にしようと考えていましたが、当日以下のロボットをまたまたX (旧Twitter) でみて衝撃をうけました。
@DisneyResearch introduces their new robot at #IROS2023! Trained in simulation with #reinforcementlearning! @ieeeiros pic.twitter.com/hH7AbKfHWL
— Davide Scaramuzza (@davsca1) October 4, 2023
こちらも高度なバランス制御と愛嬌のある動作の融合が凄いですが、やはりスムーズな足上げ動作が目につきました。
強烈にロール軸を活用しているようにもみえず非常に自然です。
コチラのロボットの衝撃もあり、まずは足を辺接地として足上げ動作の検証を実施することを固く決意しました。
足には差動駆動型リンク機構を採用しました。
これで行くか pic.twitter.com/Mb5hanBFuG
— HomeMadeGarbage (@H0meMadeGarbage) October 5, 2023
ひとまず完成
素体完成 pic.twitter.com/7hJIasQgoH
— HomeMadeGarbage (@H0meMadeGarbage) October 6, 2023
足を辺接地させるためにブレード状に変更。
イヤイヤ期 pic.twitter.com/j2SJ7Pu87z
— HomeMadeGarbage (@H0meMadeGarbage) October 6, 2023
適当に高速足踏みさせてみたw
足上げ検討
検証用の足が出来たので早速足上げ動作の確認を実施しました。
想像の通り 足上げ前に若干足を延ばして体を跳ね上げてからの足上げで高さが稼げることが確認できました。
この足上げ高さがあれば前後進もスムーズに実施できることが予想できます。
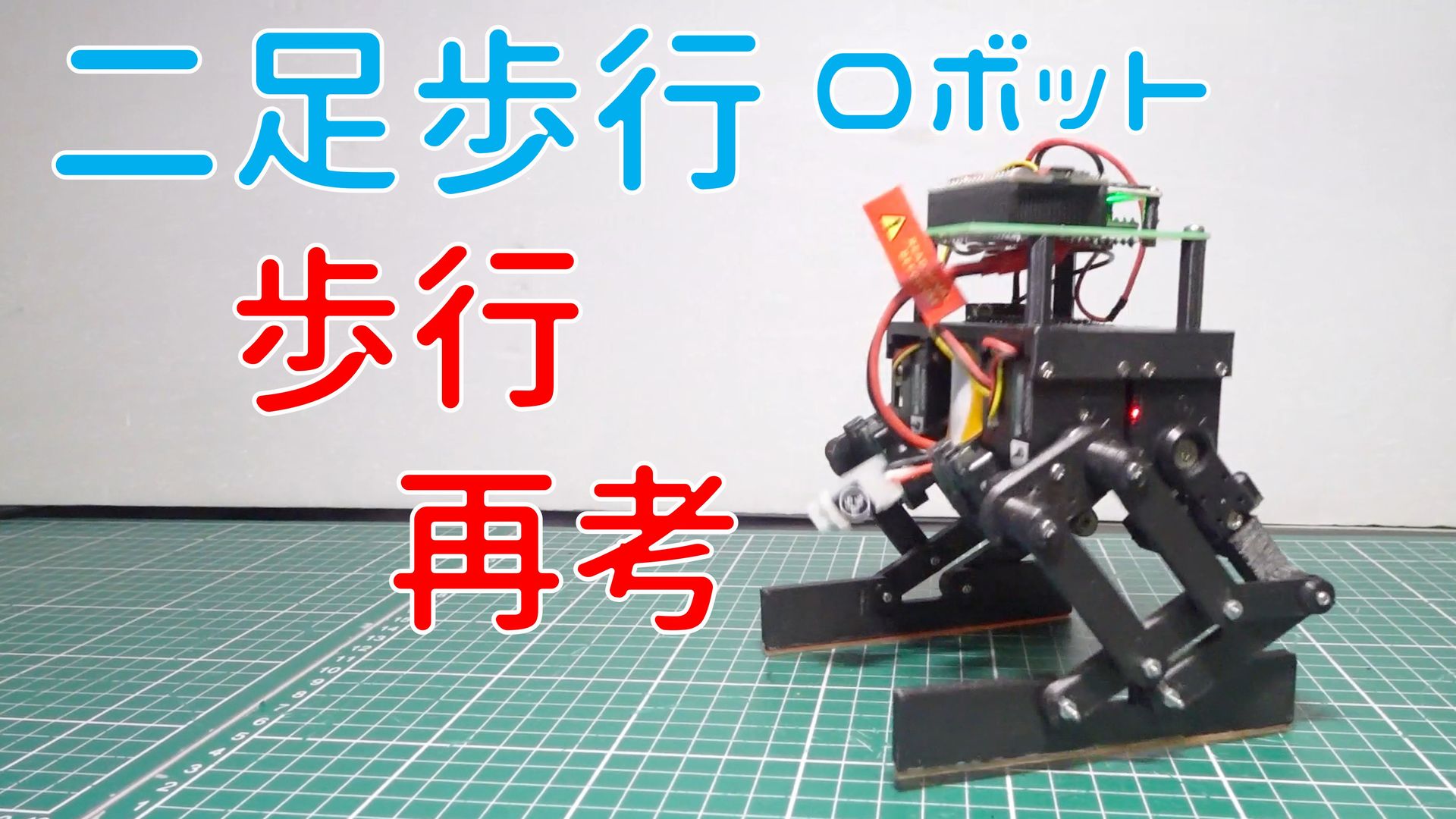
歩行
高さのある足上げ動作が確認できましたので、方向の検証に進みます。
かるく歩行の確認。
可能性ありそうなので 明日 足調整してバッテリ搭載にしてみる pic.twitter.com/Vg6OUu8mVW
— HomeMadeGarbage (@H0meMadeGarbage) October 7, 2023
イケそうなので機体を作りこみます。
バッテリとコントローラを搭載して機体完成。
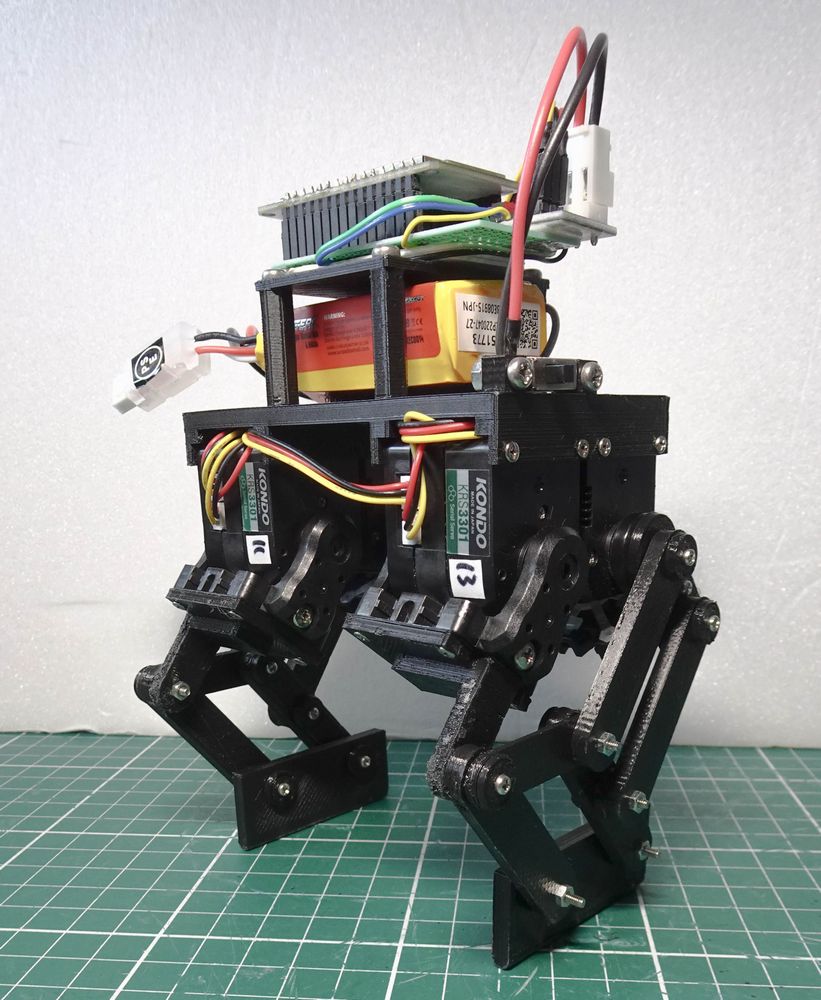
独立して歩行できました。
動作確認
まだ可能性感じるので続行前後のバランスはおいおいとして足改造必要かな
あと動作急峻すぎるので正弦波で整形もしくはフィルタリングかな#二足歩行ロボット pic.twitter.com/VfTu2eXx95— HomeMadeGarbage (@H0meMadeGarbage) October 8, 2023
ちょっと不安定なので足のブレード長さを延長しました。前後の安定性が向上しました。
カチャカチャロボットウォーク pic.twitter.com/7KmaCbP5GF
— HomeMadeGarbage (@H0meMadeGarbage) October 8, 2023
動作がカチャカチャと急峻なので、サーボのスピードを調整し歩行動作をスムーズに上品に仕上げました。
ロール軸なしに立派に足上げをしてスムーズに前後進できました。
おわりに
ここでは足上げ動作確認のために足ロボットを製作し検証を進めました。
ロール軸なしでの足上げ及びスムーズな歩行動作を実現できました。
次は当初の目的である点接地二足歩行バランスロボットを目指してIMUセンサ搭載など試してみたいと思います。
それではまた
追記
IMU追加 (2023/10/16)
IMUセンサを搭載して動作確認したくなったので基板交換
基板変えた pic.twitter.com/sG6ifiDDnI
— HomeMadeGarbage (@H0meMadeGarbage) October 12, 2023
IMU搭載基板でも問題なく歩行動作確認。
little roaming droids in action at 俺ん家 pic.twitter.com/HrRmwLpXhK
— HomeMadeGarbage (@H0meMadeGarbage) October 13, 2023
IMUセンサで傾きと角速度を検出して足高さをPD制御でいつものヤツ
これは縁起物みたいなもんだから
一応やっておきましょう pic.twitter.com/0hwWMpJJlB— HomeMadeGarbage (@H0meMadeGarbage) October 12, 2023
こずいたり足つかんだりするのやめて pic.twitter.com/kPaBQVmJTs
— HomeMadeGarbage (@H0meMadeGarbage) October 13, 2023
先日開催した HomeMadeGarbage the GARAGE 2023 でも展示して喜ばれました。
オートバランスシステムを実感していただきました#HMGG2023 pic.twitter.com/m1QkhRzrzG
— HomeMadeGarbage (@H0meMadeGarbage) October 14, 2023





hello ,j’ai vraiment adorer se projet a tel point que je les repris pour le refaire moi-même mais rassurer je ne vous plagie point j’ai refait tout la conception moi même, mais je me suis appuyer sur votre travail . Pour l’instant j’ai pas encore fini ,quel que détail de conception a finir , j’ai même pas débuter la programmation dire a quel point je galère😂. Mais je le sens plus tôt bien .