
3Dプリンタ
クローラー倒立ボット MorphCrawlerBot
去年 (2025年) 完成させたクローラー倒立ボット MorphCrawlerBot を先日改修して 去年の連載記事に追記という形で記載したのですが、埋もれてもったいないので改めて粒だてたいと思います。 https://homemadegarbage.com/bldcservo10// &nb...

ブラシレスモータでサーボ10 - クローラーボット完成 –
前回までにホイール駆動モータを含む部品を全て胴体に実装し足を軽くして、ブラシレスモータ関節駆動による倒立振子の高いジャンプ動作を確認しました。 https://homemadegarbage.com/bldcservo09 ここでは倒立振子の仕上げに入りたいと思います。 涙の最終回です。 &...

ブラシレスモータでサーボ9 - ジャンプ再挑戦 –
前回は高いジャンプ動作実現を目指して、駆動部品を全て胴体に移動して足を軽くするべくタイミングベルトとボールベアリングの検証を実施しました。 https://homemadegarbage.com/bldcservo08// ここでは関節用ブラシレスモータのトルクの検証を実施します...

ブラシレスモータでサーボ8 - タイミングベルトとボールベアリング –
前回はブラシレスモータサーボによる屈伸型倒立振子のジャンプ動作を確認しました。 足が重たくそれほど高くは飛べませんでした。。 足を伸ばしても機体が浮かず、急いで縮めても足に引っ張られてすぐ着地してしまうのです :cry: 。 タイミン...
長男くんの3DCG
HomeMadeGarbage Advent Calendar 2024 |2日目 今年は長男くんがただゲームを楽しむだけではなく、3DCG制作に興味を持つなど非常に大きな成長をみせてくれましたので紹介させてください。 Animal Revolt Battle Simulat...
Advent Calendar 2024.12.2 長男くん ![]()
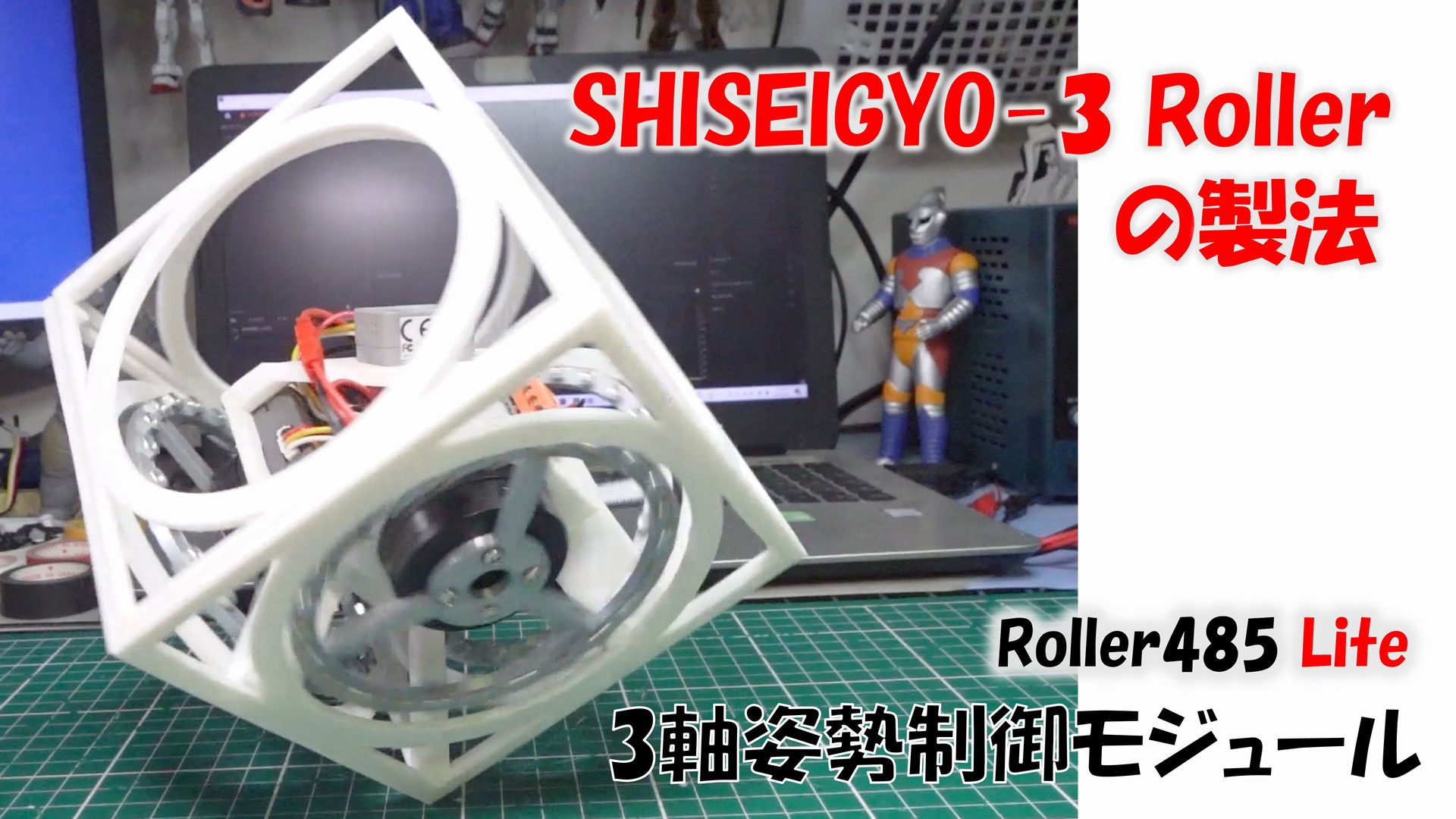
3軸姿勢制御モジュール SHISEIGYO-3 Roller の製法
はじめに SHISEIGYO-3 Roller はRoller485 Lite ユニットを用いた3軸姿勢制御モジュールです。 コントローラとしてIMU内蔵のATOM Matrixを使用し点倒立を実現します。 マイコン内蔵のRoller485 Lite ユニットを用いることで構成が非常にシン...
電子工作 2024.10.22 お父ちゃん ![]()

3軸姿勢制御モジュール SHISEIGYO-3 DC の製法
はじめに SHISEIGYO-3 DC は小型ドローンに使用されるコアレスモータを採用した 1辺82mmの小型3軸姿勢制御モジュールです。コントローラとしてIMU内蔵のATOMS3を使用し点倒立を実現します。 SHISEIGYO-3 DC coming soon... pic.twitte...
電子工作 2024.10.21 お父ちゃん ![]()
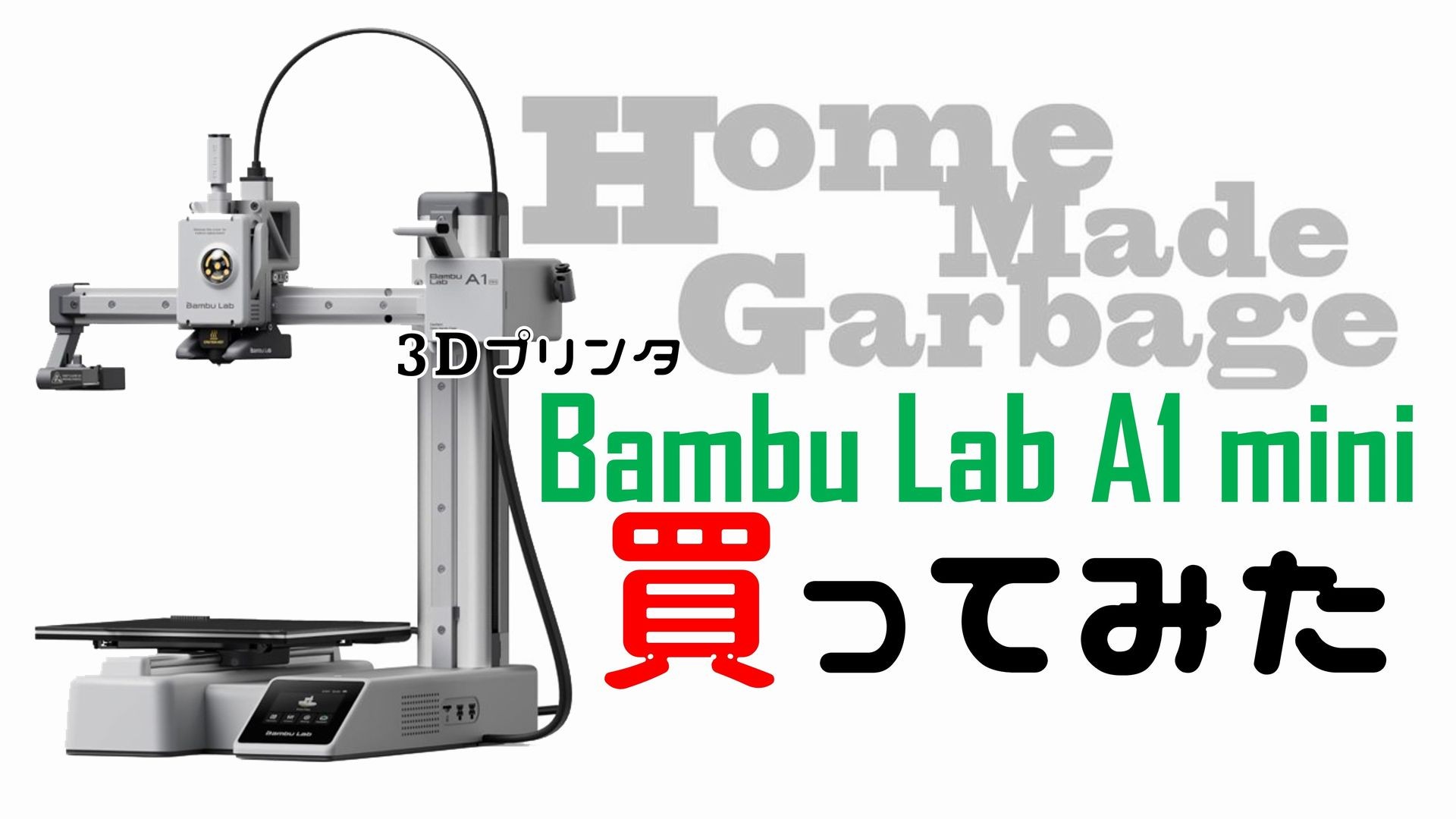
3Dプリンタ Bambu Lab A1 mini を買ってみた
3Dプリンタ Bambu Lab A1 mini を購入しました。 [amazonjs asin="B0CRYJBKQQ" locale="JP" title="Bambu Lab A1 mini 3D プリンター、多色造形対応、20分組み立て完成、高速高精度、全自動キャリブレーション&流量補正、...
工作・ハンドメイド 2024.4.29 お父ちゃん ![]()
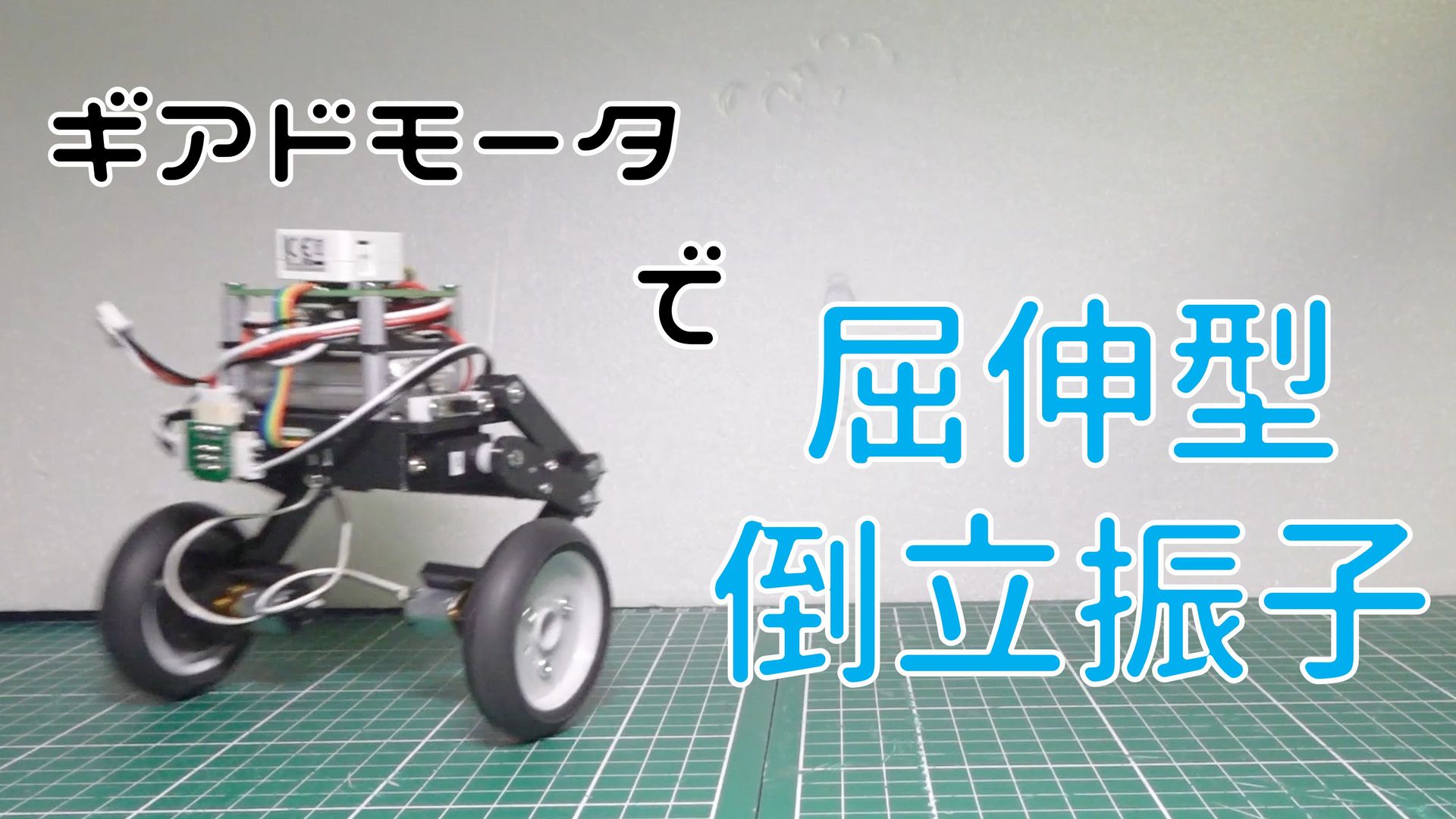
ギアドモータで屈伸型倒立振子
以前 ギアドモータを用いて倒立振子製作を楽しみました。 https://homemadegarbage.com/bala16// 小型で軽いのでギアドモータで屈伸型の倒立振子の製作も試してみました。 筐体製作 屈伸型の筐体を3Dプリントで製作しま...
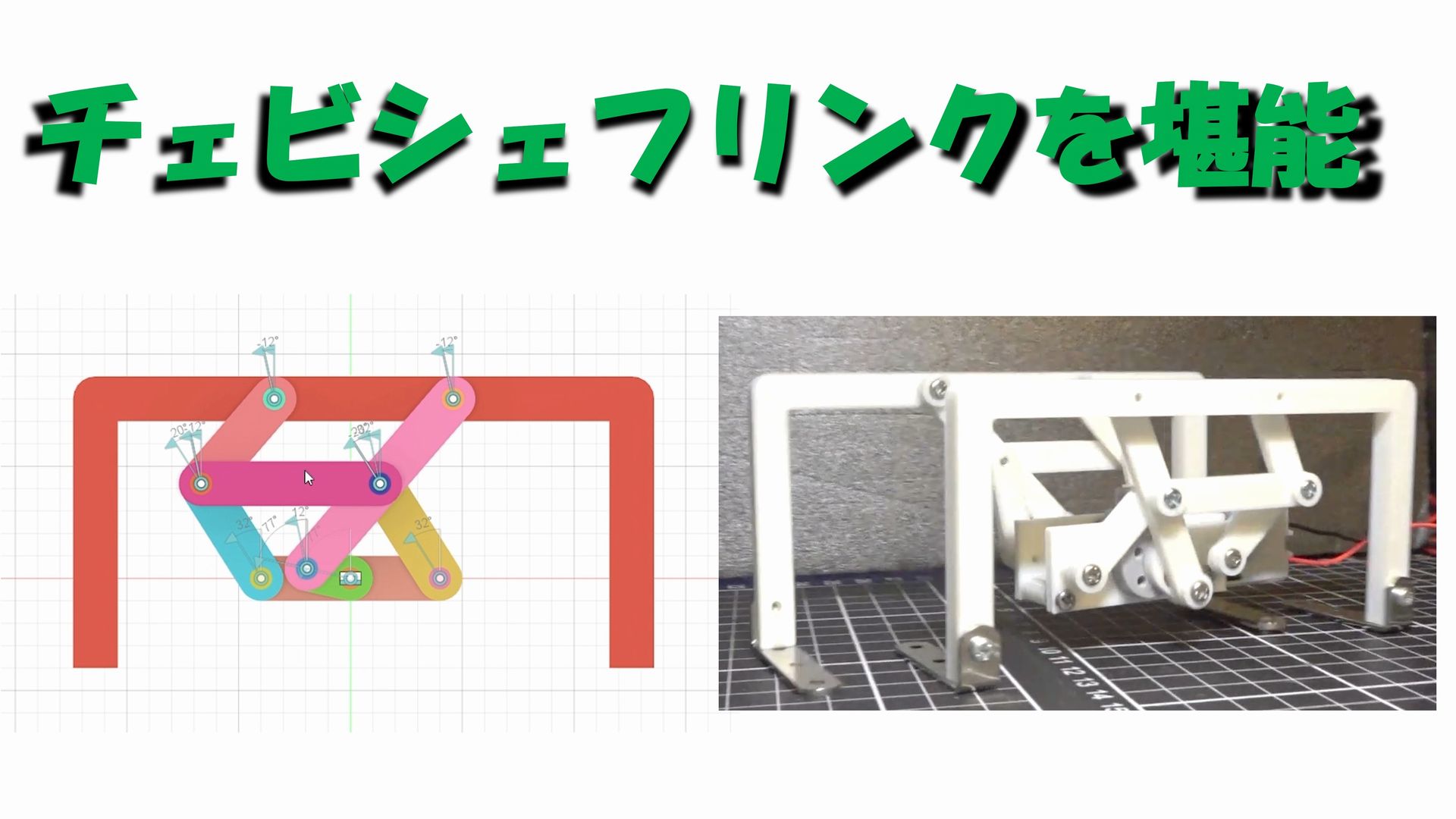
私のチェビシェフリンク学習
今回はリンク機構の一種であるチェビシェフリンクについて勉強しましたので報告いたします。 リンク機構につきましては、以前 平行リンクでロボット歩行の検討を実施しております。 https://homemadegarbage.com/onewalkerjr02 私自身はこういった機構...
工作・ハンドメイド 2023.2.4 お父ちゃん ![]()
3Dスキャナー Whale でフルカラースキャンに挑戦
前回は Whale のターンテーブルモードによる3Dスキャンを楽しみました。 https://homemadegarbage.com/whale02 ここではテクスチャを外部のカメラで撮ってフルカラースキャンに挑戦します。 WhaleはMakuakeにて予約販売中です (販売予定期間:2023...
工作・ハンドメイド 2023.1.8 お父ちゃん ![]()

3Dスキャナー Whale のターンテーブルモードでスキャン
前回はサンプル提供いただいた3Dスキャナー「Whale」の基本動作を確認しました。 https://homemadegarbage.com/whale01 ここでは3Dスキャナー「Whale」のターンテーブルモードを試してみましたので報告いたします。 WhaleはMakuake...
工作・ハンドメイド 2023.1.6 お父ちゃん ![]()
3Dスキャナー Whale を使ってみた
なんとCR-Scan Lizardに続き、3Dスキャナー「Whale」をサンプル提供していただきました!ありがとうございます!! 3Dスキャナー「Whale」を ありがたく使用させていただき、弊ブログにて使用法を勉強しながら色々報告できればと考えております。 WhaleはMaku...
工作・ハンドメイド 2023.1.5 お父ちゃん ![]()

模コン2022 参加
HomeMadeGarbage Advent Calendar 2022 |19日目 吉本プラモデル部 主催の模型コンテスト『模コン2022』に参加させていただきましたので報告いたします。 吉本プラモデル部と私 今年の春頃から無性にプラモデルを作りたくなり、You...
Advent Calendar / 工作・ハンドメイド 2022.12.19 お父ちゃん ![]()
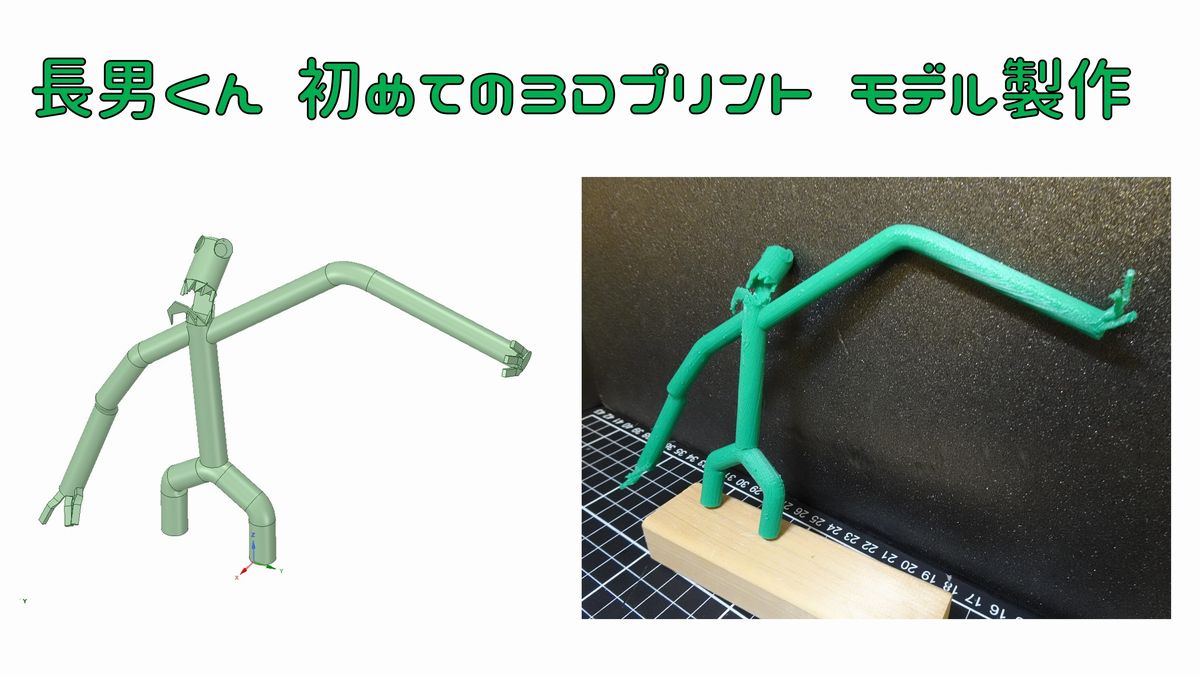
長男くん 初めての3Dプリント モデル製作
HomeMadeGarbage Advent Calendar 2022 |10日目 長男くんがはじめて3Dモデルの作製に挑戦しました。 製作したモデルを3Dプリントもして楽しみました♪ 本文は長男くん監修の元 お父ちゃんが書いています。 モデル製作 ...
Advent Calendar / 工作・ハンドメイド 2022.12.10 長男くん ![]()