Cubli
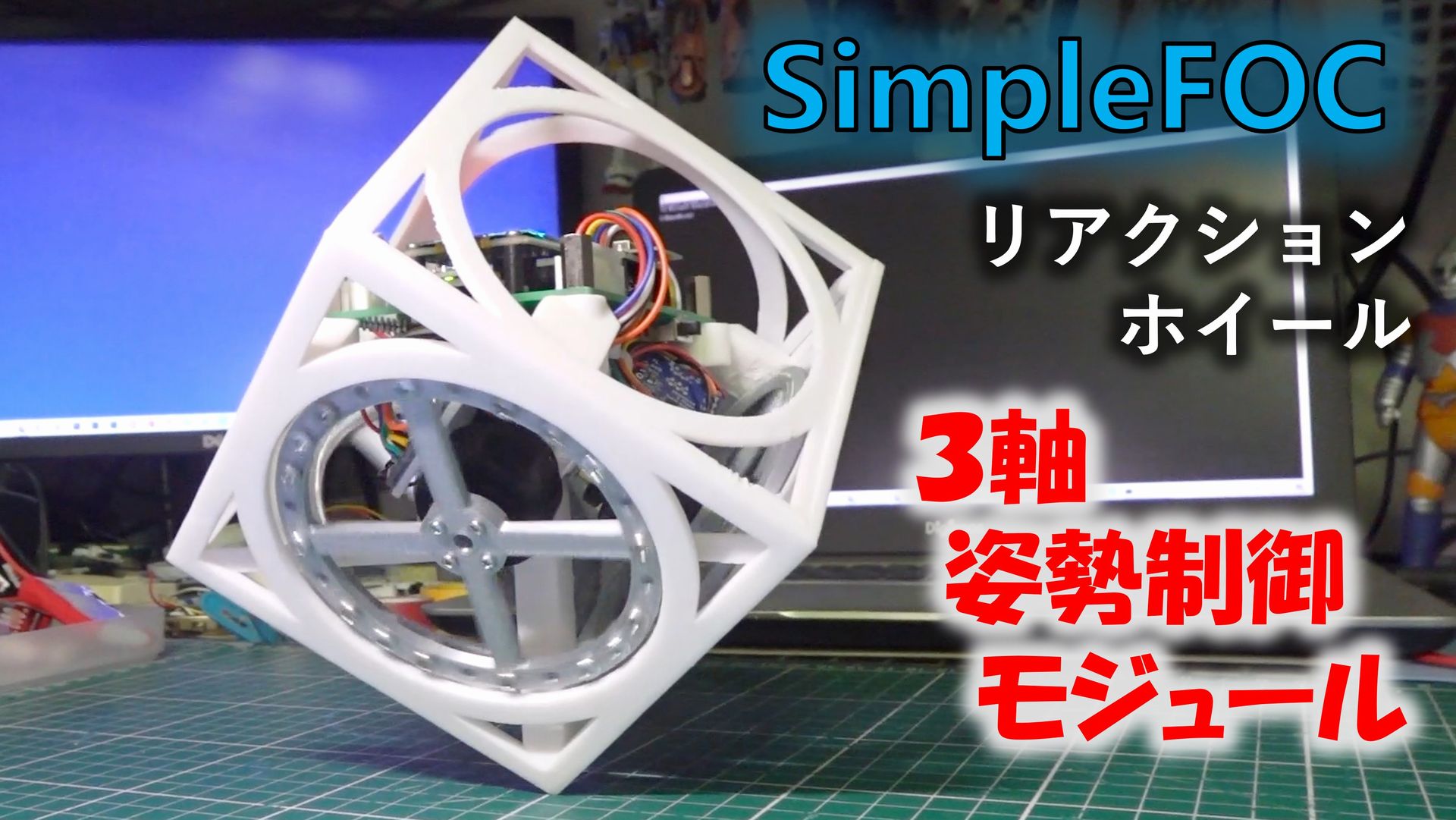
SimpleFOC でリアクションホイール姿勢制御モジュール3
またまたブラシレスモータによるリアクションホイール姿勢制御モジュールの検討を実施しました。 過去、何度もいろいろな部品や構成でブラシレスモータ姿勢制御モジュールを製作してきました。 https://homemadegarbage.com/simplefoc03/ https:/...
電子工作 2025.7.8 お父ちゃん ![]()

電子工作作品選集 2024年
HomeMadeGarbage Advent Calendar 2024 |23日目 2024年も多くの検討や製作をしてきました。 ここで1年を振り返り その傾向から未来を占いたいと思います。 電子工作とは 今 1年を振り返るに際し目を閉じると…結局 LED光らしたりモー...
Advent Calendar / 電子工作 2024.12.23 お父ちゃん ![]()
3軸姿勢制御モジュール SHISEIGYO-3 Roller の製法
はじめに SHISEIGYO-3 Roller はRoller485 Lite ユニットを用いた3軸姿勢制御モジュールです。 コントローラとしてIMU内蔵のATOM Matrixを使用し点倒立を実現します。 マイコン内蔵のRoller485 Lite ユニットを用いることで構成が非常にシン...
電子工作 2024.10.22 お父ちゃん ![]()

3軸姿勢制御モジュール SHISEIGYO-3 DC の製法
はじめに SHISEIGYO-3 DC は小型ドローンに使用されるコアレスモータを採用した 1辺82mmの小型3軸姿勢制御モジュールです。コントローラとしてIMU内蔵のATOMS3を使用し点倒立を実現します。 SHISEIGYO-3 DC coming soon... pic.twitte...
電子工作 2024.10.21 お父ちゃん ![]()
Roller485 Lite おすすめ秋冬着回しコーデ
M5Stack社よりマイコンSTM32内蔵のブラシレスモータユニットが発売されました。 [bc url="https://docs.m5stack.com/ja/unit/Unit-Roller485%20Lite"] 最近はSimpleFOCを活用したブラシ...
電子工作 2024.10.20 お父ちゃん ![]()

SimpleFOCによるベクトル制御への誘い
前回はSimpleFOCで複数モータのI2Cマルチプレクサでの同一I2Cバスによるエンコーダ回転監視動作を確認しました。 https://homemadegarbage.com/simplefoc09/ 倒立振子や3軸姿勢制御モジュールで動作確認したのですがいずれも電流センスなしのクローズドルー...
そして I2Cマルチプレクサ
これまでSimpleFOCによるブラシレスモータ制御で倒立振子やリアクションホイール姿勢制御モジュールなどの製作を楽しんできました。 モータを複数制御する際はエンコーダとしてA/B相出力のあるAS5601を使用してきました。 A/B相出力ではパルスカウンタで回転を検知するため異常回転時に絶対位置...

3重点倒立 ーリアクションホイールへの道70ー
先日 SimpleFOCでのブラシレスモータ制御による3軸姿勢制御モジュールを製作しました。 https://homemadegarbage.com/simplefoc08/ これにより手元に3機の3軸姿勢制御モジュールがそろいましたのでちょっと余計なことをしてみました。 &n...
電子工作 2024.10.7 お父ちゃん ![]()
SimpleFOC で3軸姿勢制御モジュール
前回までにSimpleFOCによるブラシレスモータの制御での1軸姿勢制御モジュールの製作・動作確認を実施しております。 https://homemadegarbage.com/simplefoc07 ここではコレを発展させてホイール3軸での点倒立姿勢制御モジュールの製作を実施しま...
電子工作 2024.10.4 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール2
前回はSimpleFOCによるリアクションホイール姿勢制御モジュールの制御を楽しみました。 https://homemadegarbage.com/simplefoc06/ モータはジンバル用の小型ブラシレスモータを使用しました。 [amazonjs asin="B09JZ56...
電子工作 2024.9.30 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール
前回はSimpleFOCライブラリを用いてブラシレスモータを制御し倒立振子を製作しました。 https://homemadegarbage.com/simplefoc05/ ここではリアクションホイールによる姿勢制御モジュールを製作したので報告いたします。 ...
電子工作 2024.9.25 お父ちゃん ![]()
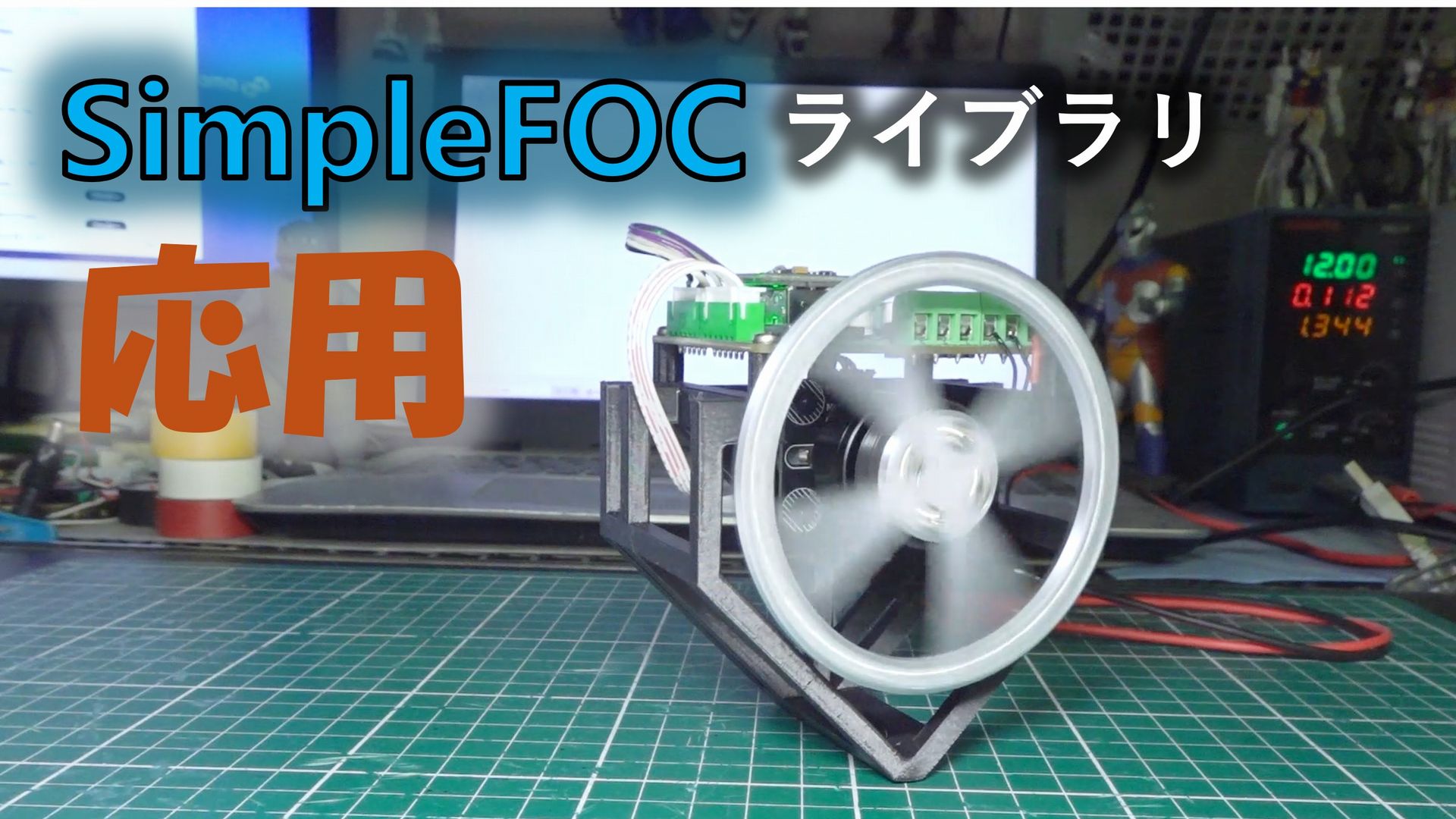
SimpleFOC ライブラリの応用
前回までにMakerbase社製 ESP32搭載ブラシレスモータコントローラを用いてSimpleFOCライブラリの基本的学習を済ませました。 https://homemadegarbage.com/simplefoc02 SimpleFOCへの理解が深まりましたので、いよいよ応用です。 応用し...
電子工作 2024.9.17 お父ちゃん ![]()

SHISEIGYO-3 DC Go がゆく ーリアクションホイールへの道69ー
ずーーっと3軸姿勢制御モジュールの活用方法を考えてきて答えを出せずにいたのですが、ドローン用の小型モータによる3軸モジュール SHISEIGYO-3 DC を完成させたのを機に実際に手を動かす勇気めいたものが湧いてきました。 https://homemadegarbage.com/reaction...
電子工作 2024.5.30 お父ちゃん ![]()
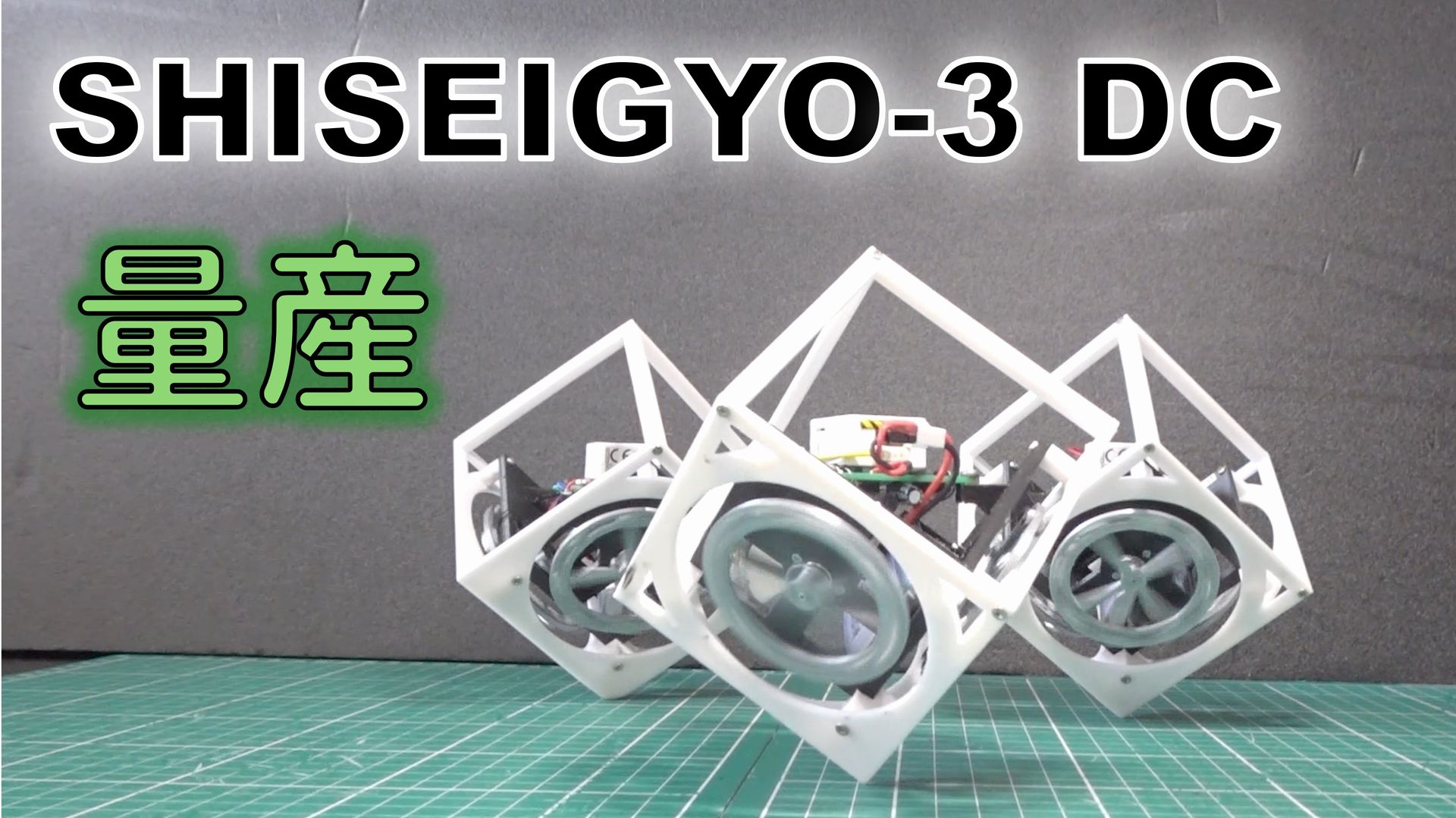
SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
前回は小型コアレスモータを用いて3軸姿勢制御モジュールを実現しました。 https://homemadegarbage.com/reactionwheel67// ここでは更にブラッシュアップを施しましたので報告いたします。 基...
電子工作 2024.3.16 お父ちゃん ![]()

SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
魅惑の3連休を前にふとDCモータで3軸姿勢制御モジュール作れないべか? と思い立ちました。 DCモータによる姿勢制御モジュールは1軸はもちろんのこと2軸までは確認済です。 https://homemadegarbage.com/reactionwheel52// 新規案件は準...
電子工作 2024.2.25 お父ちゃん ![]()