リンク機構
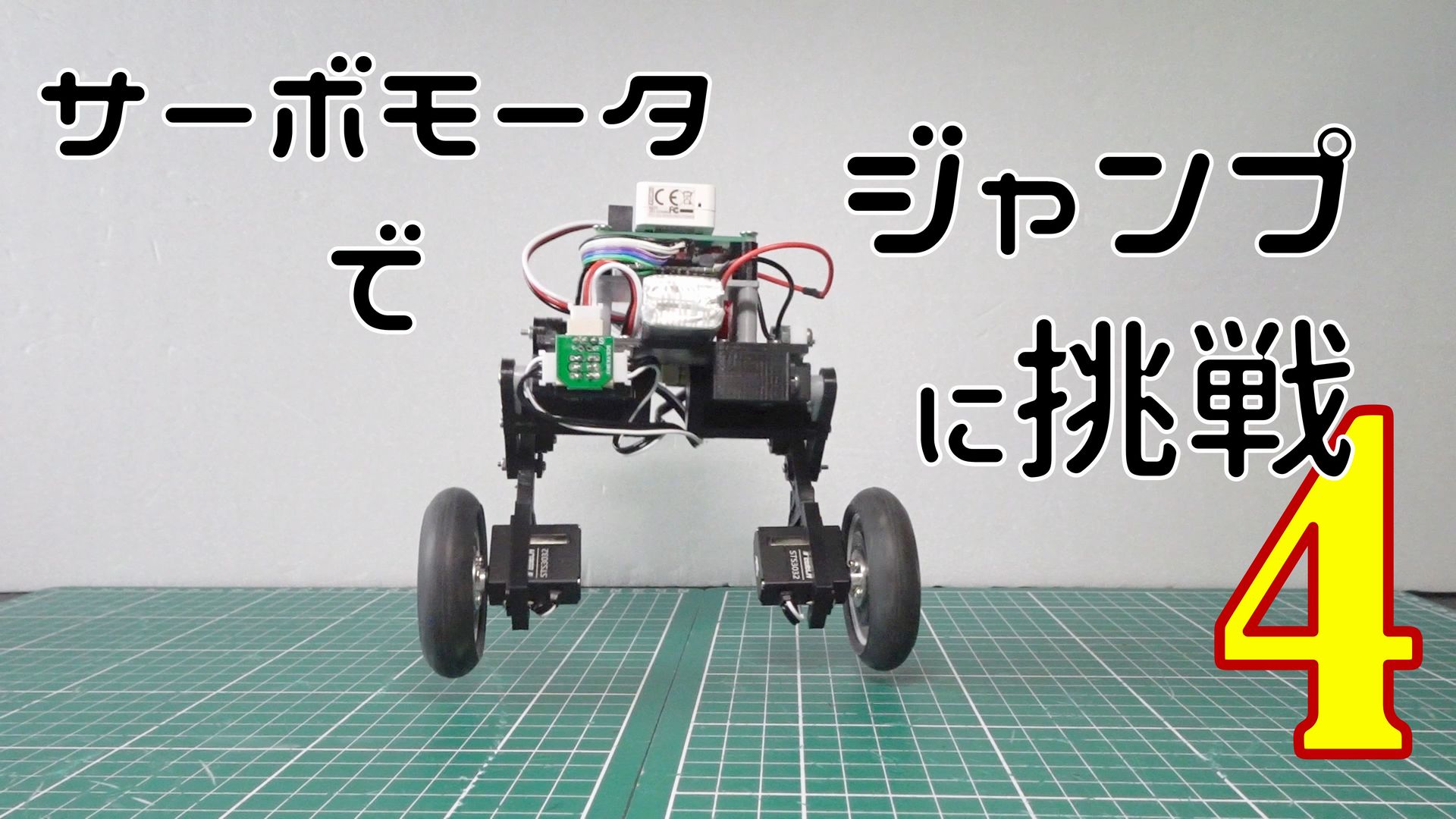
サーボモータでジャンプに挑戦4
前回はシリアルサーボ STS3032を用いての屈伸倒立振子を製作し、ジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala17// しかし残念ながらジャンプ後の着地は実現できませんでした。 ホイール用モータ 倒立振子の...

サーボモータでジャンプに挑戦3
以前、シリアルサーボ STS3032 で構成した足によるジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala15// ここで、屈伸型の倒立振子でジャンプする際にはホイール用のモータの軽量化も必要そうであることがわかりました。 前回は軽量のギアドモー...
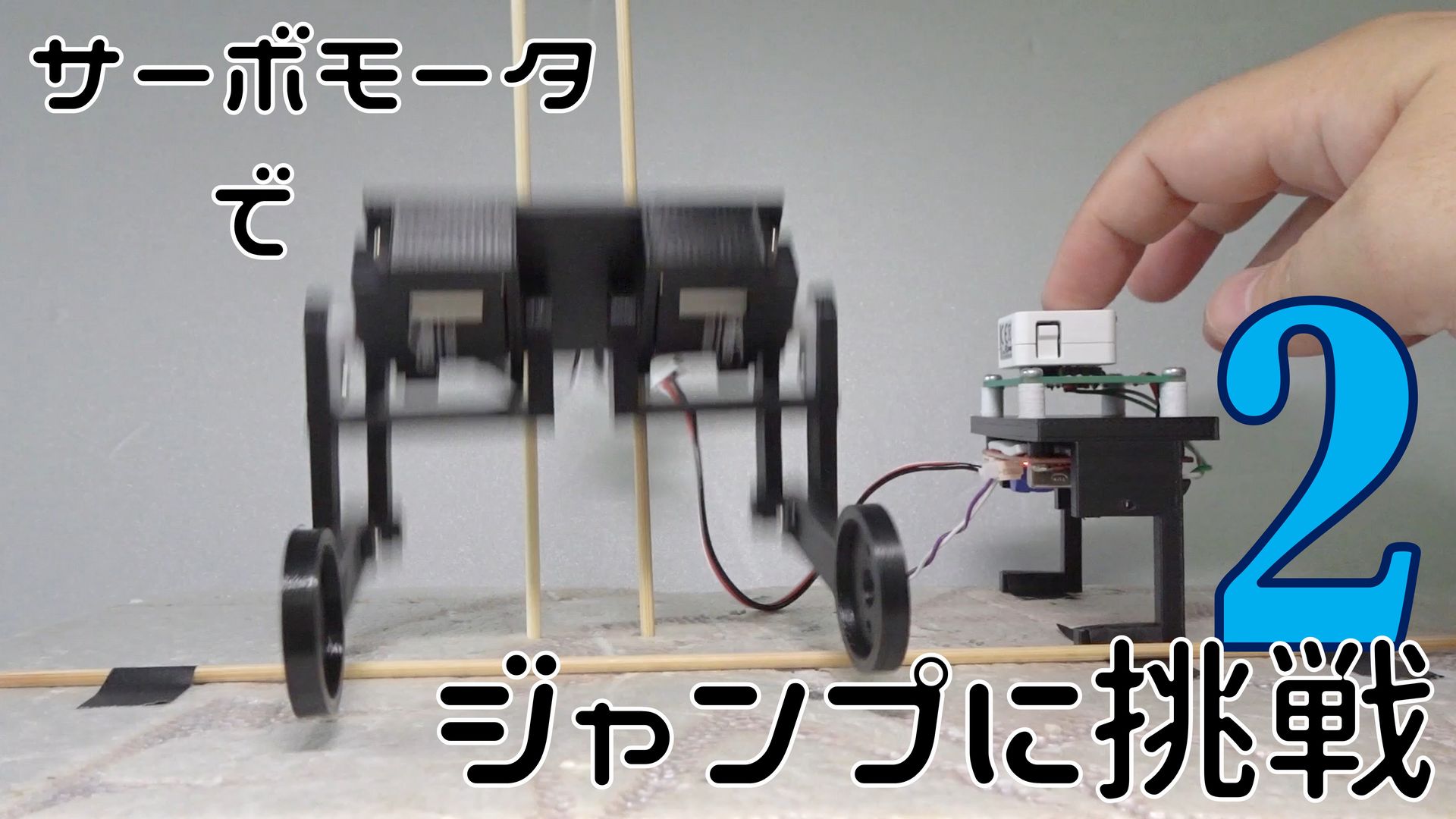
サーボモータでジャンプに挑戦2
以前、サーボモータで足を構築してジャンプ動作の確認を実施しました。 https://homemadegarbage.com/bala13// ここでは更に検証しましたので報告します。 KRS-3301 前回は KRS-3301で1脚ロボットを作製してジャンプ動作...
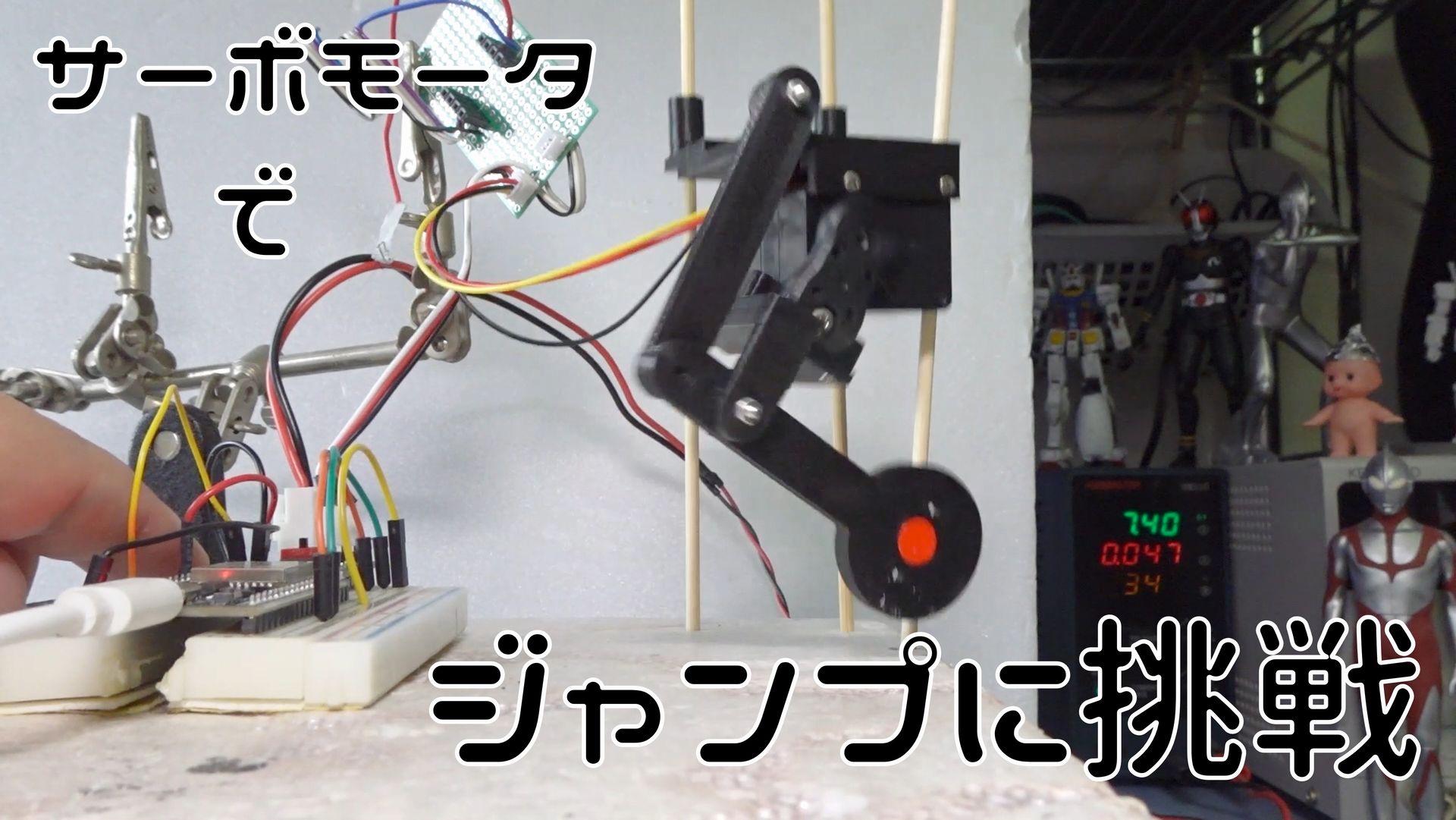
サーボモータでジャンプに挑戦
以前に屈伸タイプの倒立振子を製作しました。 https://homemadegarbage.com/bala11 この倒立振子をジャンプさせてみたくなったので検討します。 ジャンプする倒立振子 こんなすごい倒立振子を見つけました。 https://twitte...

DCモータ 倒立振子で屈伸
前回はDCモータ RE-280RA を用いて倒立振子を製作しました。 https://homemadegarbage.com/bala10// [amazonjs asin="B07F83J78X" locale="JP" title="モーター RE-280RA"] ここでは膝を設けて屈伸動...

バケチャンロボを実現したい我々5 ーボディ完成ー
前回はバケチャンロボのボディについて検討し目の電子ペーパーや足の機構を納めてサイズを決定しました。 https://homemadegarbage.com/bakerobo04/ ここではボディの完成を目指し、バケチャンロボのハードメイン部を決定づけたいと思います。 &...
電子工作 2023.6.3 お父ちゃん ![]()
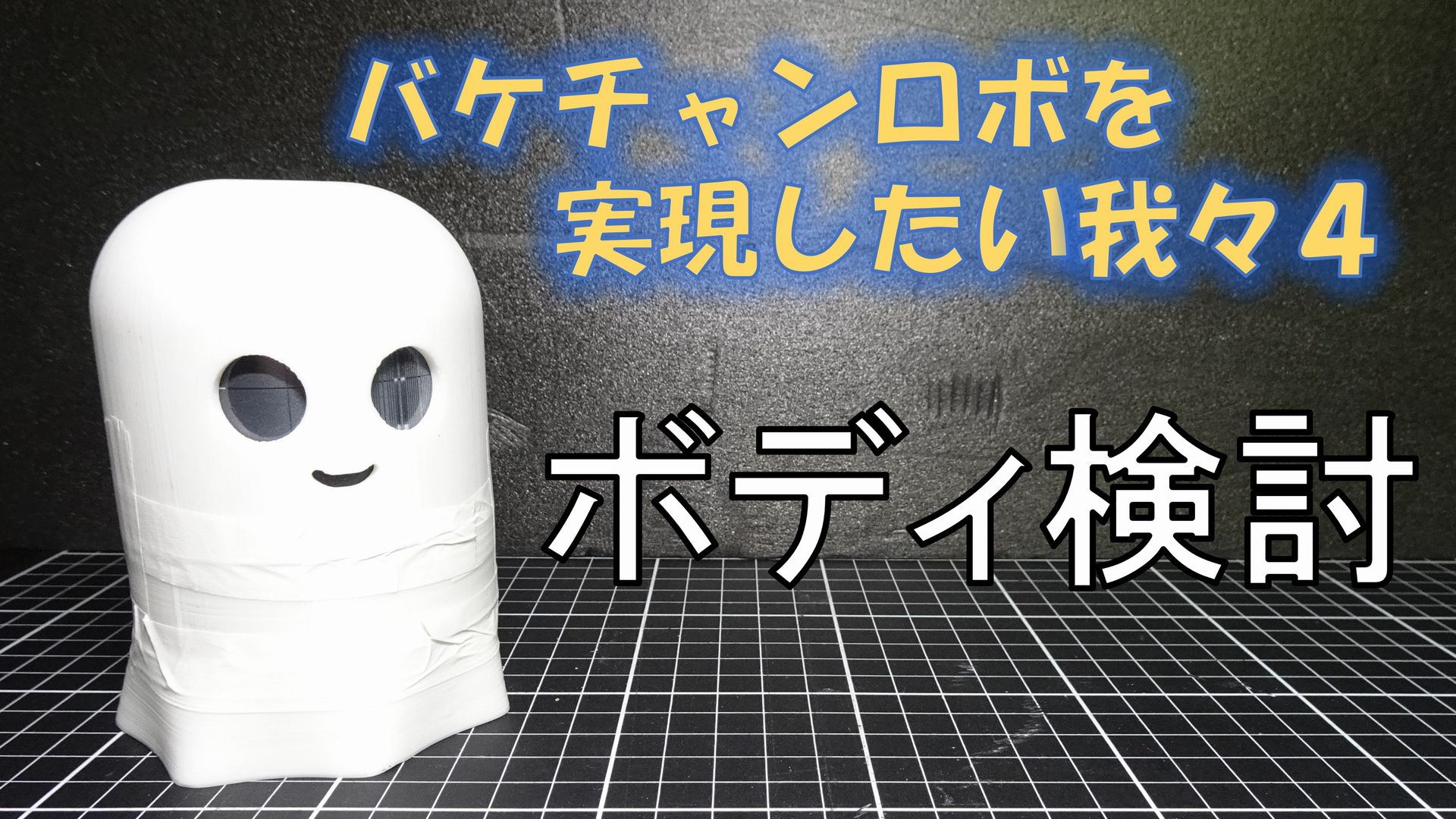
バケチャンロボを実現したい我々4 ーボディ検討ー
前回は歯車の学習をしクラウンギアによる回転軸直行変換を用いてバケチャンロボの足を製作しました。 https://homemadegarbage.com/bakerobo03 ここでは、前回製作した足を受けてボディの検討を実施しました。 ボディ直径検...
電子工作 2023.5.29 お父ちゃん ![]()
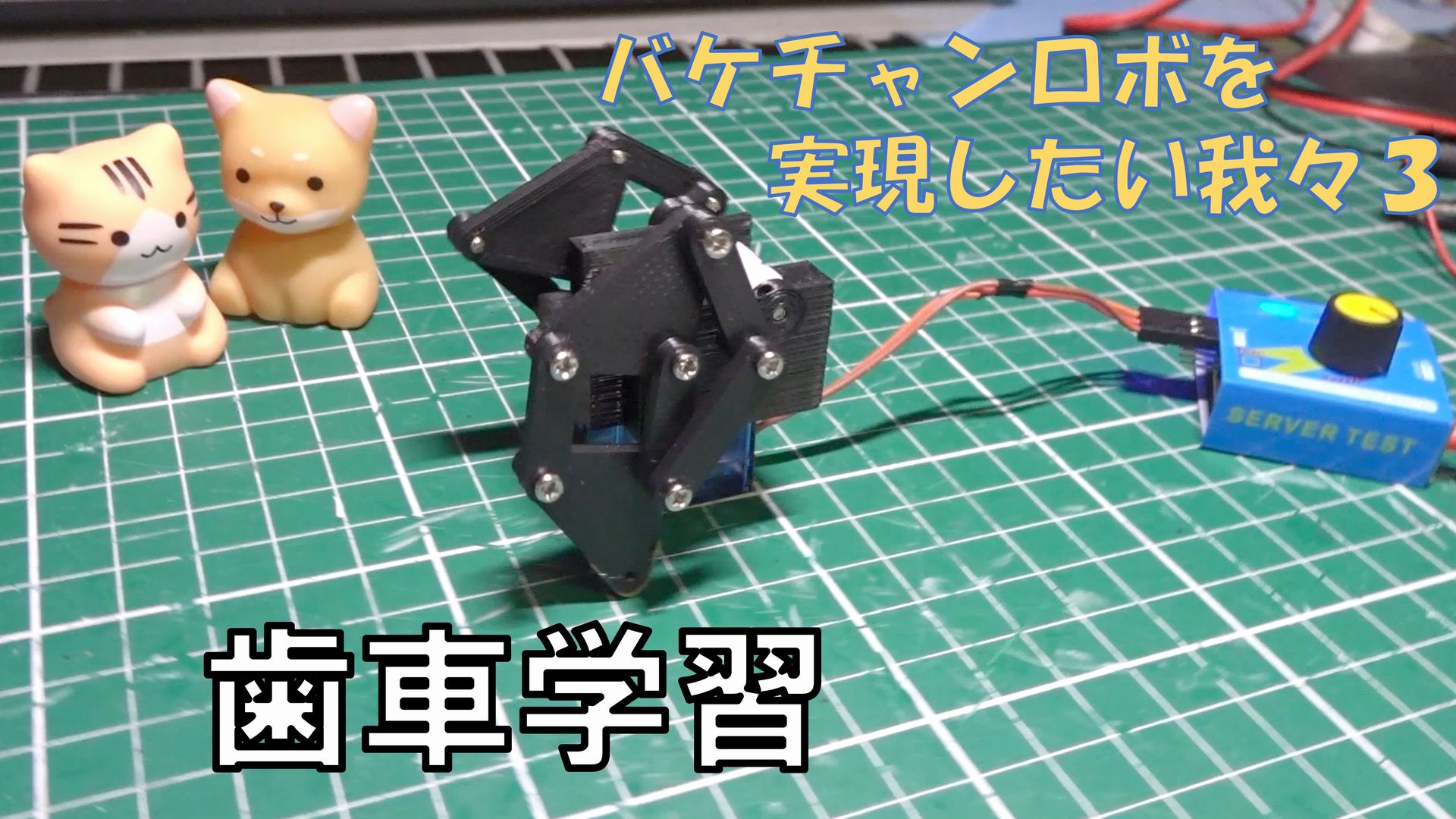
バケチャンロボを実現したい我々3 ー歯車学習ー
前回は電子ペーパーのボディ収納と足の検討を行いました。 https://homemadegarbage.com/bakerobo02 ここでは足の小型化を目指して歯車の勉強をしました。 足を小さく実現したい 生みの親であるお母ちゃんによると、バケ...
電子工作 2023.5.13 お父ちゃん ![]()
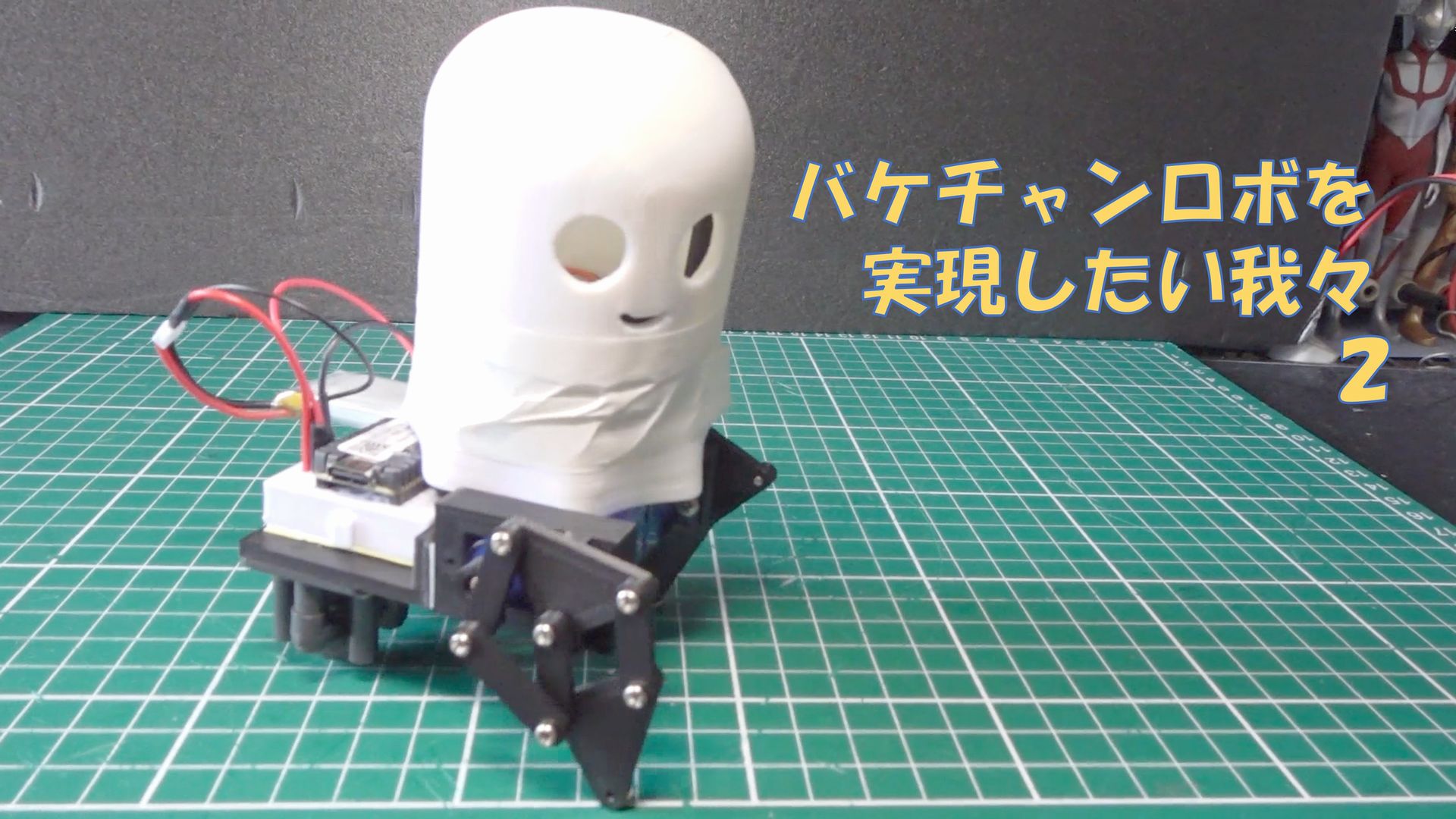
バケチャンロボを実現したい我々2
前回はお母ちゃんが発案した"バケチャンロボ"の実現を目指して、ボディや目の表示の検討を実施しました。 https://homemadegarbage.com/bakerobo01/ 更に検討を進めましたので報告いたします。 電子ペーパーディスプレイ...
電子工作 2023.5.2 お父ちゃん ![]()

シリアルサーボモータ SCS0009 で倒立振子 完結編
前回はサーボモータSCS0009を用いて屈伸動作する倒立振子の検討を実施しました。 https://homemadegarbage.com/bala07 ここでは前回でた課題の検討を進め サーボモータを用いた倒立振子の神髄に迫りたいと思います。 前...

シリアルサーボモータ SCS0009 で倒立振子 屈伸動作
前回はサーボモータSCS0009を用いて倒立振子を作製し、倒立動作を確認しました。 https://homemadegarbage.com/bala06/ ここではそもそも倒立振子を製作しようと思ったきっかけである屈伸運動の検討をいたします。 https://twitter.c...
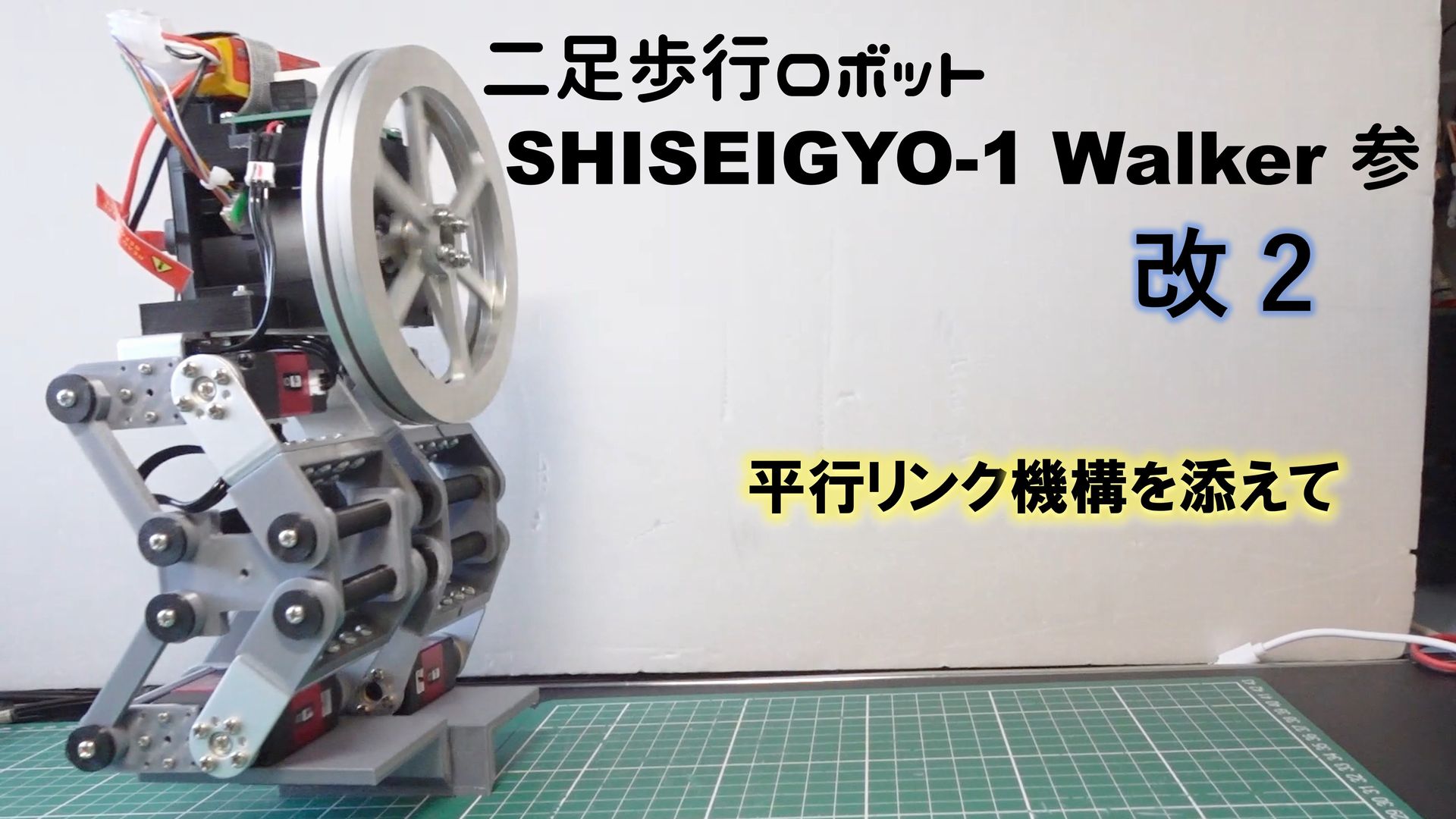
二足歩行ロボット SHISEIGYO-1 Walker 参 改 2
前回はSHISEIGYO-1 Walker 参 の足の構成を再検討し、2足歩行動作を実施しました。 https://homemadegarbage.com/onewalkersan07/ ここでは更に足の構成を再々検討しましたので報告します。 平行リンク機構検討 ...
電子工作 2023.2.22 お父ちゃん ![]()