SHISEIGYO-2 Walker の歩行を再検討3
前回はSHISEIGYO-2 Walkerで逆運動学による歩行を確認しました。
上下前後を正弦波形で回転するように移動させる歩行から、もう少し人間らしい歩行を目指してみました。
目次
足の前後
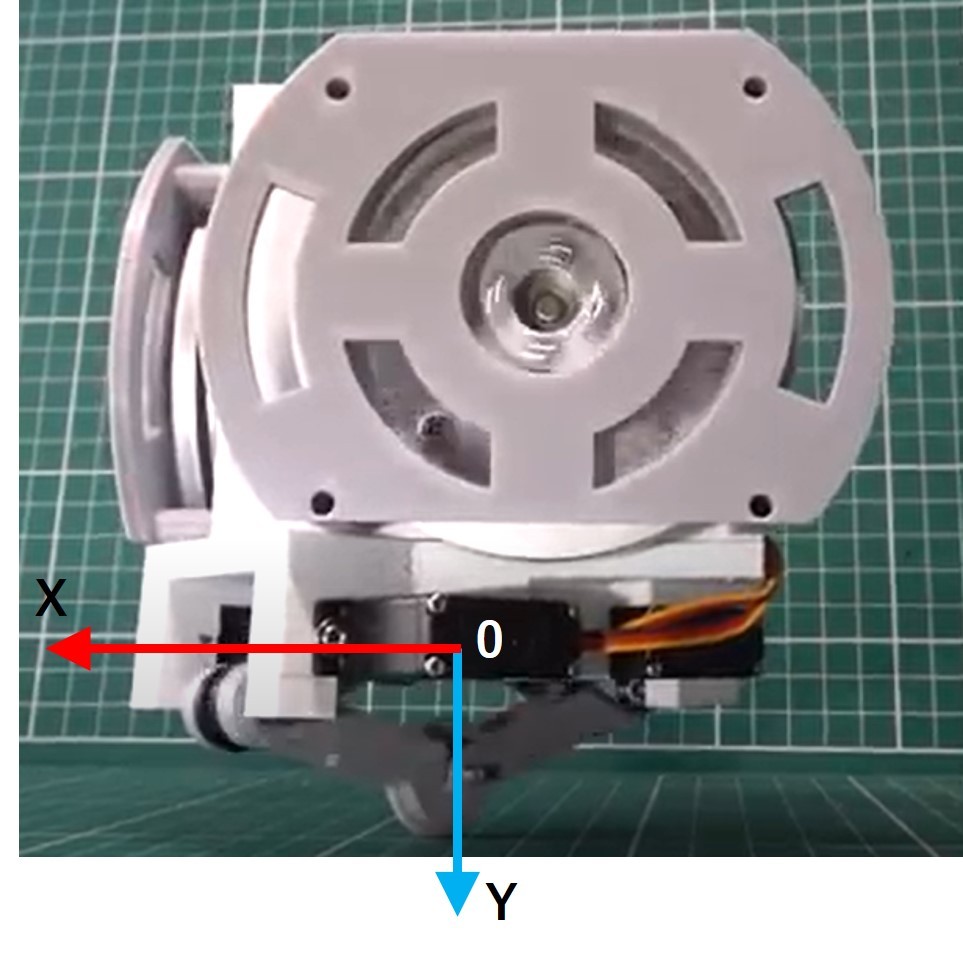
まずは片足で足をどれほど前後できるのか確認してみました。
片足立ちで足前後移動
高さ 30mm
前後移動 10mm ~ -10mm pic.twitter.com/FUNF8o7BDk— HomeMadeGarbage (@H0meMadeGarbage) January 17, 2022
足の高さ30mmで ゆっくりとですが前後 10mm ~ -10mm 移動できました。
支点動かして機体傾けるこの動作は面白いですね。
今後なにかに応用できそう。
歩行検討
片足を上げて前方に下げると同時に他方を後ろに下げて前進する人間っぽい歩行を目指します。
足の座標は以下のように動かしてみます。
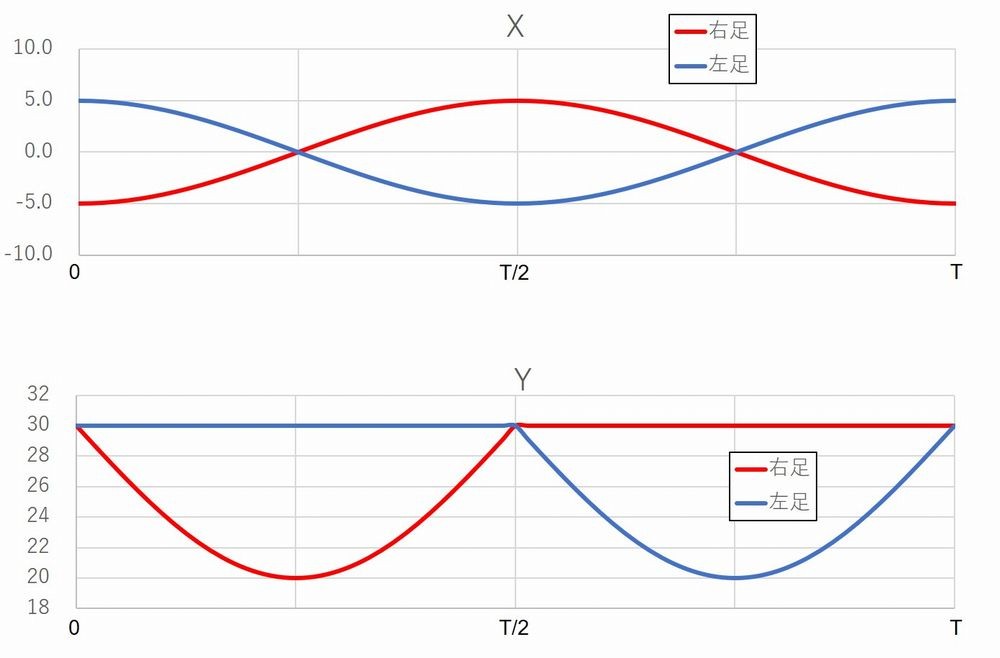
動作
歩行検討
片足を上げて前方に下げると同時に他方を後ろに下げて前進する人間っぽい歩行を目指した。ホイールをギリギリまで調整してもっと大股にしたい pic.twitter.com/ARfKq5G1C9
— HomeMadeGarbage (@H0meMadeGarbage) January 17, 2022
片足接地時にも足を後方に下げているので常に前進しており、割と自然な歩行になったのではないでしょうか?
足の高さ30mmで前後 5mm ~ -5mm 移動で歩行できました。
リアクションホイールの制御ゲインや回転検出ロータリエンコーダの4逓倍化などでオートバランスの精度向上を図りましたが前後移動は ±5~6mmが限界でした。
これ以上大股で歩くには足高さを低くしたりフライホイールのトルクを上げるしかなさそうです。
おわりに
ここではSHISEIGYO-2 Walkerの方向の再検討を実施いたしました。
SHISEIGYO-2 Walker 歩行検討 pic.twitter.com/4LpzyFplJG
— HomeMadeGarbage (@H0meMadeGarbage) January 18, 2022
安定性や歩幅の向上が実現され大変喜んでいます。
でも以前のほうがロボットらしくていいかなとも思わなくもない(;^ω^)
33日後に2足歩行ロボットを完成させたい俺
19日目#33日2足歩行ロボ pic.twitter.com/ReKEgtOiYZ— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2021