Unsuperior Mobility Vehicle プロジェクト1
本記事にはアフィリエイト広告が含まれます。
先日凄いロボットをネット上で見かけました。
すごすぎるんですけど
RAI Institute社が開発するUMV (Ultra Mobility Vehicle) です。
姿勢保持にフライホイールとか使っているわけではなくタイヤの駆動のみでバランスをとって停止・走行し、強烈なウェイトシフトでハイジャンプも実現しています。
各動作は強化学習によって実現され 将来的にはパルクールのような動作を目指すとのことです。
ヤバいね

目次
俺もやってみたい
これまでブラシレスモータによる2足歩行ロボットの検討をしてきました。
この検討で2足歩行ロボットで豊かな動作を実現するためには、モータ数を増やす必要があることを痛感いたしました。
将来的にはモータを増やして自由度の高い2足歩行ロボットも検討したいのですが
ちょっと今は箸が進まないなぁと思っていたところ冒頭のUMVとの衝撃的な出会いに恵まれたのです。
UMVの走行は後輪の回転と前輪のステアリングのみで制御されているようにみえます。非常にシンプルな構成です。
https://t.co/gpzszSAV4N pic.twitter.com/7FZ1n83c6z
— R3PL1C8R Drones (@R3PL1C8R) February 21, 2025
マネしてぇ。。憧れるわぁ
やってみた
てことでやってみました。
まずは後輪の回転と前輪のハンドルのみでバランスをとっての停止ができるのかを試してみます。
早速検証用の機体を作ってみたのですが、1号機はタイヤを太くし過ぎて制御なしで倒立してしまったのでやり直し
タイヤの形状調整する可能性あるからTPUで出力のホイール式にしたわ pic.twitter.com/DaefHWHQgm
— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2025
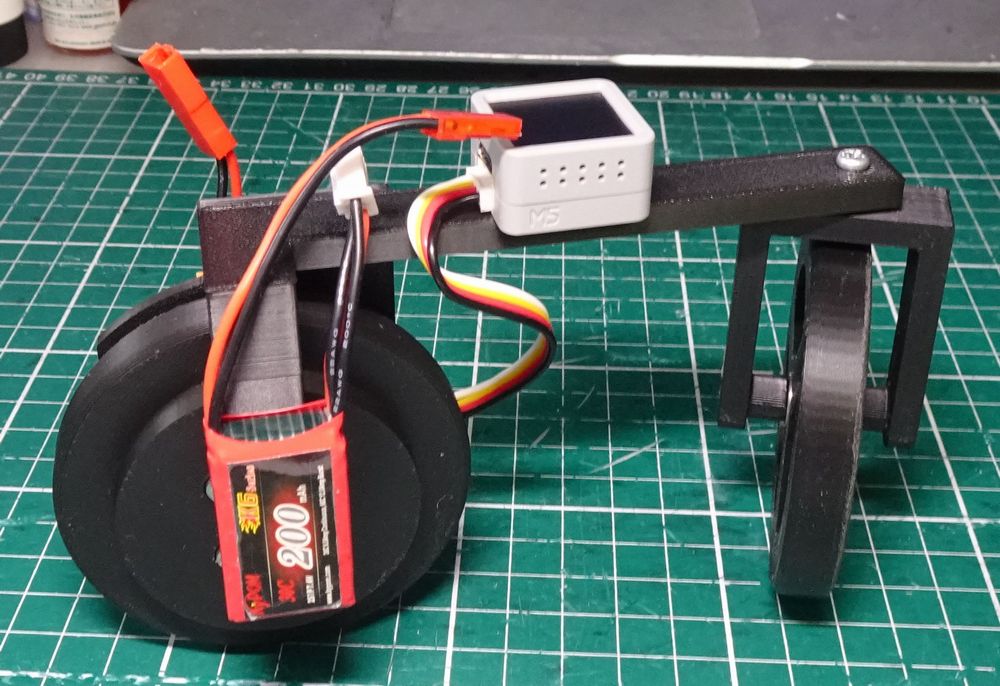
試作機体完成
自立しない機体完成 pic.twitter.com/trL1EPHaoe
— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2025
前輪はネジ止めしてステアリング角度を調整して固定できるようにしました。
後輪はM5Stack社のブラシレスモータモジュール Roller485 Liteで駆動します。

コントローラには姿勢検知IMUセンサ内蔵のATOM Matrixを採用しました。

停止動作確認
試作機でバランス停止動作を確認してみました。
へーこれでも倒立できるんだ 勉強になった
ちょっと前輪が軽くてグリップ甘いけどステアリング作りこみで重くなるでしょうタイヤがカプセルコーポレーション社製みたいで気に入っている pic.twitter.com/gqnNbo1pbe
— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2025
できた!
前輪を深めにハンドルを切った状態で固定して、IMUセンサで検出した機体姿勢で倒立振子のように後輪を制御してUMVのようにバランス停止動作を実現することができました。
コレで停止出来るものなのかと大変驚きました。
こりゃいい!
ステアリング
前輪のステアリングにはシリアルサーボ SCS0009を使用しました。
ステアリングはSCS0009にした pic.twitter.com/jNvuz2ptf4
— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2025
サーボによるステアリング角度固定で再度停止動作確認
うん!いい感じ。
Unsuperior Mobility Vehicle
ここまでのお試しでバランス停止動作や前輪ステアリング実装まで実現できました。
そこで本格的に自分なりのUMV実現を目指そうと思います。
私のUMVは “Unsuperior Mobility Vehicle” です。
今後は走行やジャンプ動作も目指したいと思います。
Unsuperiorですから本家のような強化学習とかはできません。
強化学習によって生成された素晴らしい動作を目でコピーして、オイルまみれの指先でシコシコ パラメータ調整して実現するのだ。
こちとら泥臭エンジニアよ。
本家 UMV (Ultra Mobility Vehicle) のハイジャンプの要となっているウェイトシフト機構は以下のように4つのモータとベルト機構やリンク機構を活用しているようです。

私の “Unsuperior Mobility Vehicle” にも以前検討した2足歩行ロボットの機構をカスタマイズしてウェイトシフト機構も実装したいと考えております。
おわりに
ここでは RAI Institute社の UMV (Ultra Mobility Vehicle) への憧れを抑えきれず、自分なりのUMV実現を目指して Unsuperior Mobility Vehicle プロジェクトを立ち上げました。
かなり課題が多いのでどうなるかわかりませんが、本ブログでプロジェクトの進捗報告をさせてもらいたいと思います。






バイクのPID制御の際には何の変数に対してゲインを調整してるのでしょうか?
一般的な倒立振子のように角度に対する誤差,誤差の微分,誤差の積分でしょうか?
ご返信いただけますと幸いです。
ここでは傾斜角と傾斜角速度、ホイール回転速度の3つをフィードバックして
それぞれゲイン調整してモータ制御(電流モード)しています。