ブラシレスモータで2足歩行ロボット5 ー ロール軸導入 ー
本記事にはアフィリエイト広告が含まれます。
再びブラシレスモータサーボによる2足歩行ロボットの研究に舞い戻ります。
前回はバランス動作の確認を実施しましたが、自由度2の簡易的な足のロボットでは動作にかなり制限があることが大きな実感として理解できました。
ディズニーの可愛いロボットも片足5軸であの表現豊かな動作実現してるのよ
a paper worth studying😉https://t.co/oIugHiOt8B pic.twitter.com/lTcrjDMO7X
— High Torque Robotics (@HTrobotics) July 31, 2024
直近ではバランス2輪車を検証して、ウエイトシフト機構にブラシレスモータを使用しました。
こちらのウエイトシフト機構が結構良く出来たので、今回はこの機構を活用して再度2足歩行ロボットを製作して再検討します。
ジャンガリアン pic.twitter.com/Pna1e1uI0i
— HomeMadeGarbage (@H0meMadeGarbage) February 27, 2025

目次
ロボット製作
ウェイトシフト機構をもう一個製作して2足歩行ロボットとします。
2個目 製作 pic.twitter.com/a4jCGIdrEI
— HomeMadeGarbage (@H0meMadeGarbage) March 4, 2025
雑に結合。しかしこれだと自由度2で以前と同じ結果になるだけです。
2脚にした pic.twitter.com/mr4ZbIiEGw
— HomeMadeGarbage (@H0meMadeGarbage) March 4, 2025
股関節ロール軸
ワンランク上のロボット足を目指してここでは股関節ロール軸を設けます。
つまり片足の自由度を3にして動きを確認します。
ロール軸はひとまず簡単のためにブラシレスモータではなくサーボモータを使用します。
手持ちのトルク20Kgのやつを使用。
ちょっと応答速度が心配だけど まぁ味見してみましょう。
応答遅いけどコレで味見して具合よかったらブラシレスモータに置き換え検討かな pic.twitter.com/fCWMXybchs
— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2025
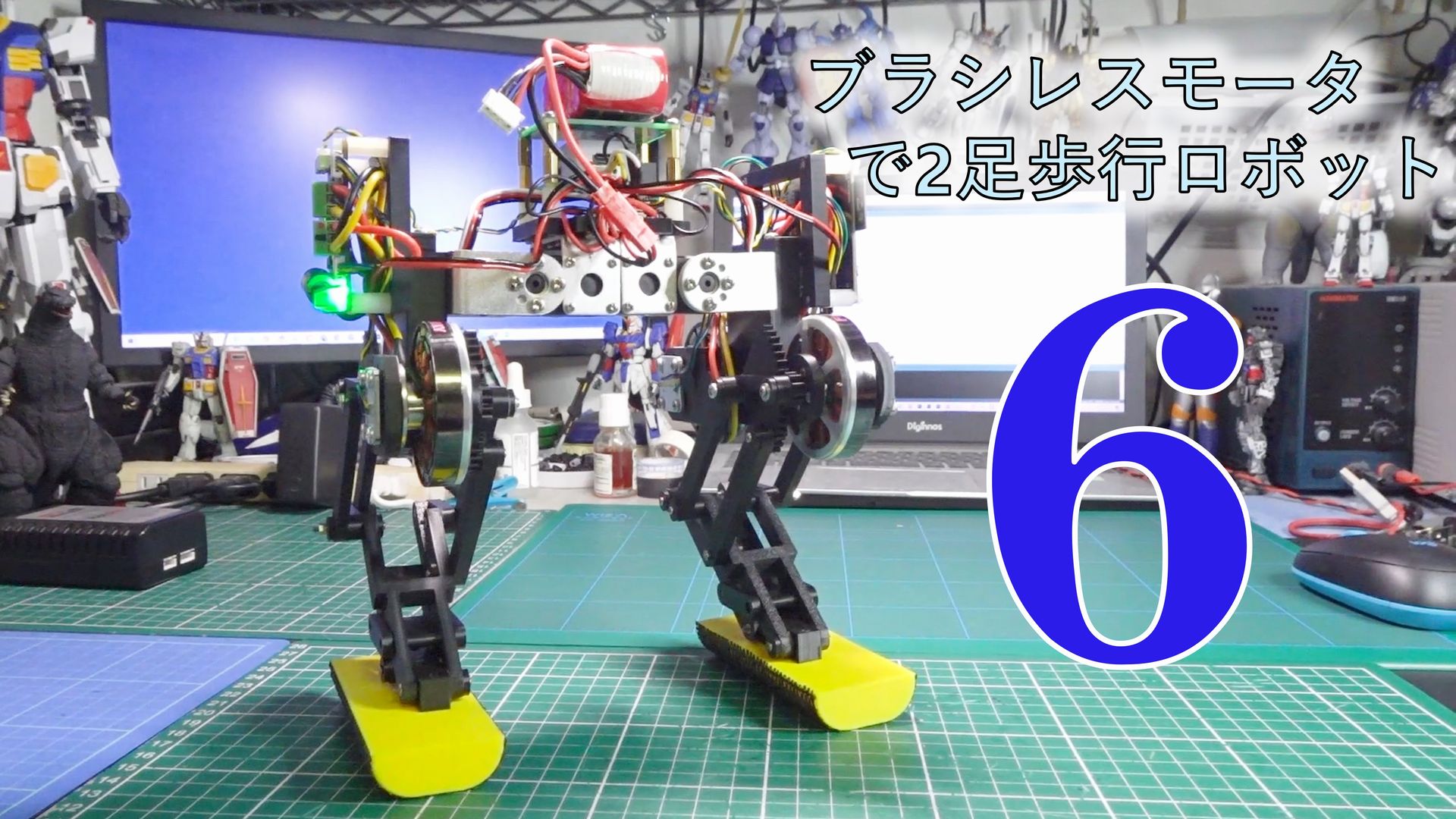
ロール軸追加に乗じて足の大腿・下腿の長さを55mmから70mmにして足長に変更しました。
足を長くして躍動感を増す pic.twitter.com/N0e2A0Hx56
— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2025
できた!
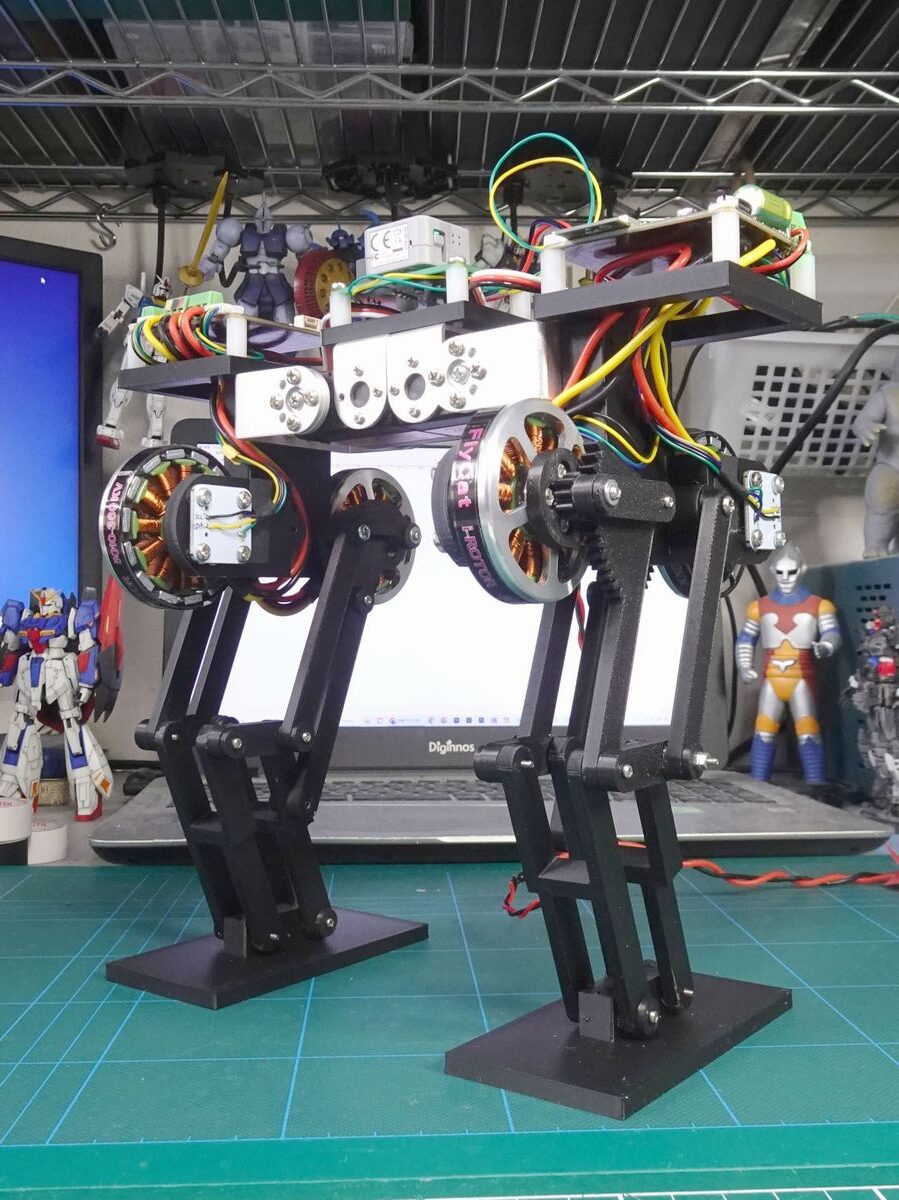
実にパーフェクト!
パーフェクト pic.twitter.com/jzYI7e7rFs
— HomeMadeGarbage (@H0meMadeGarbage) March 7, 2025
とりあえずロール軸はIMU内蔵コントローラ ATOM Matrix によって足底を並行に保つように制御 (後に誤りと気づく)。
— HomeMadeGarbage (@H0meMadeGarbage) March 7, 2025
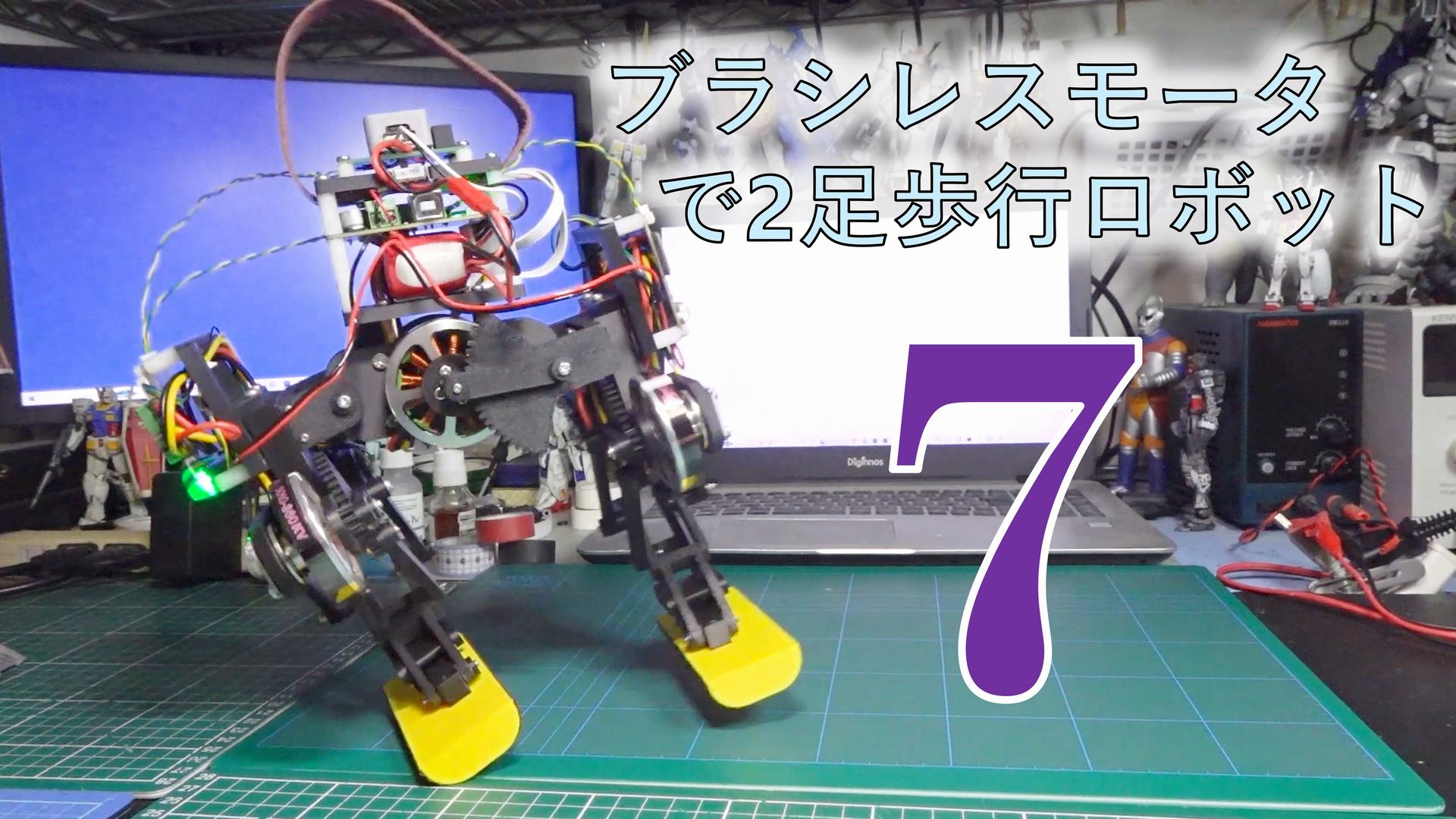
足踏み
足踏み動作の確認をします。
なんかうるさい。。。おかしいなぁ。。
エッホエッホ
う…うるせぇ pic.twitter.com/8tkJoq6anx— HomeMadeGarbage (@H0meMadeGarbage) March 8, 2025
足の滑りを低減するために足裏に牛革を貼って、再度足踏み動作を確認したところ。。。
足裏滑り止めに革貼ったらロール軸大暴れ
大人のフィードバック制御かましますか pic.twitter.com/QMdX2Cvn7C— HomeMadeGarbage (@H0meMadeGarbage) March 8, 2025
大暴れして立ってられない。。。
ここでやっとロール軸の制御に誤りがあることに気づきます。
ロール軸制御修正
ロール軸は足底を平行に保つように制御ではなく、体幹が常に平行になるように変更しました。
センサの姿勢角のPD制御で平行制御しています。
こっちが正しいか pic.twitter.com/njFzhECuAs
— HomeMadeGarbage (@H0meMadeGarbage) March 8, 2025
これで体幹がバランスよく保たれ、足踏み動作もバッチリできています。
足踏みのフローは以下のとおり
・足を伸ばして地面を蹴り上げてる
・すぐに足を縮めて足上げ
コレを交互に繰り返し、ロール軸は常に体感を並行に保つように制御しています。
このくらいの足踏み周期ですと、サーボモータの遅延も大きくは気になりませんでした。
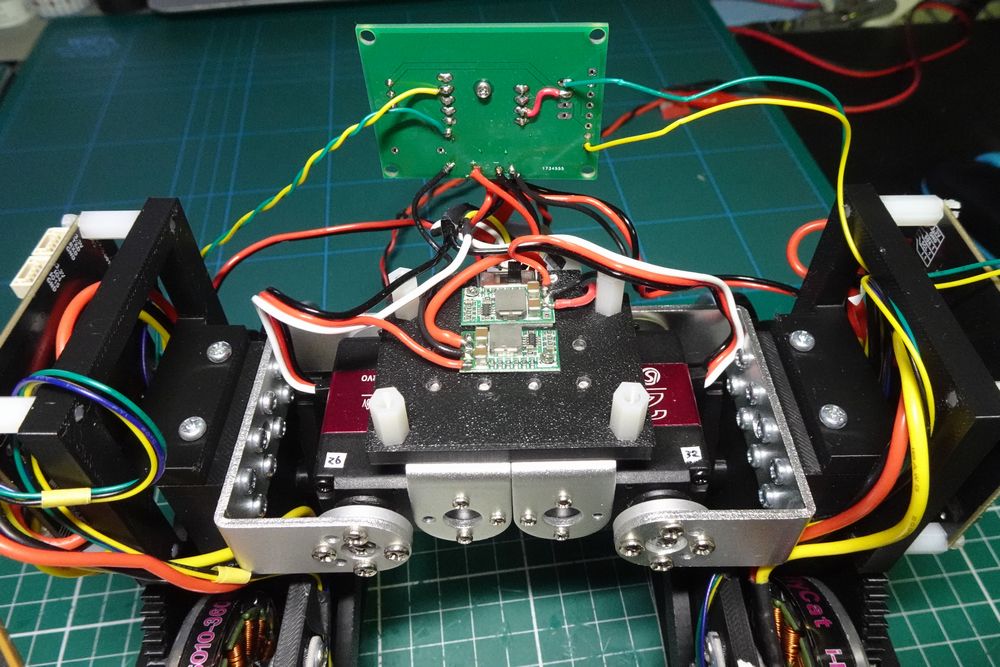
ここでブラシレスモータコントロール基板の配置と足底の形状を変更しました。
足先は内側を10mmほど詰めました。
モータコントロール基板配置変更 pic.twitter.com/TU9i8kBzaB
— HomeMadeGarbage (@H0meMadeGarbage) March 9, 2025
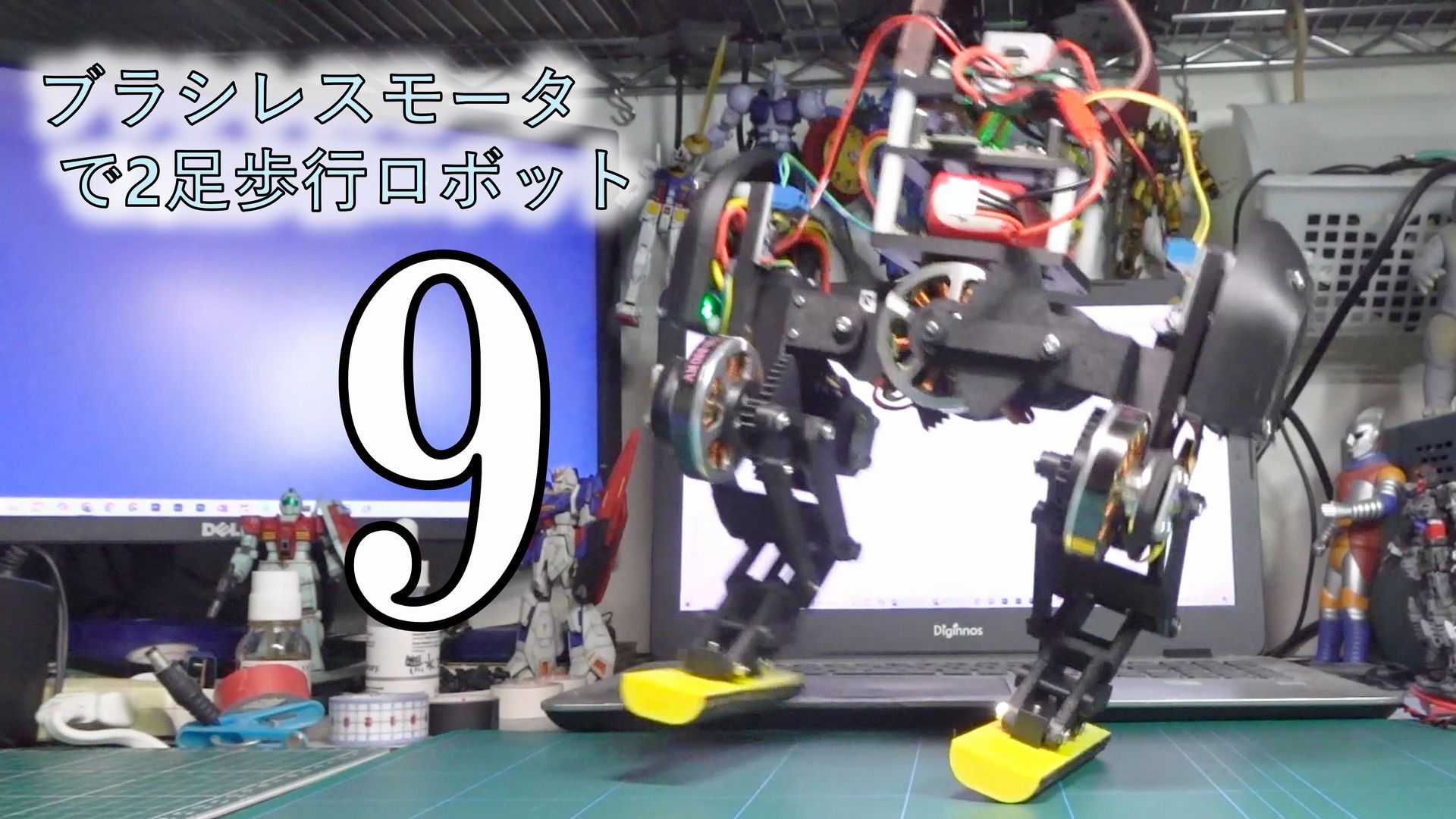
歩行
ロール軸追加による足踏み動作を確認できましたので、いよいよ歩行動作の確認です。
あんよは上手
まだよちよちだけど pic.twitter.com/hSYy9Q6xTq
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2025
ちょっと足がまだ滑っているので、牛革からダイソーで買った滑り止めシートに変更して貼り付けてみました。

滑りがだいぶ改善
お滑りだいぶ解消された pic.twitter.com/3jmxfy9Oxa
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2025
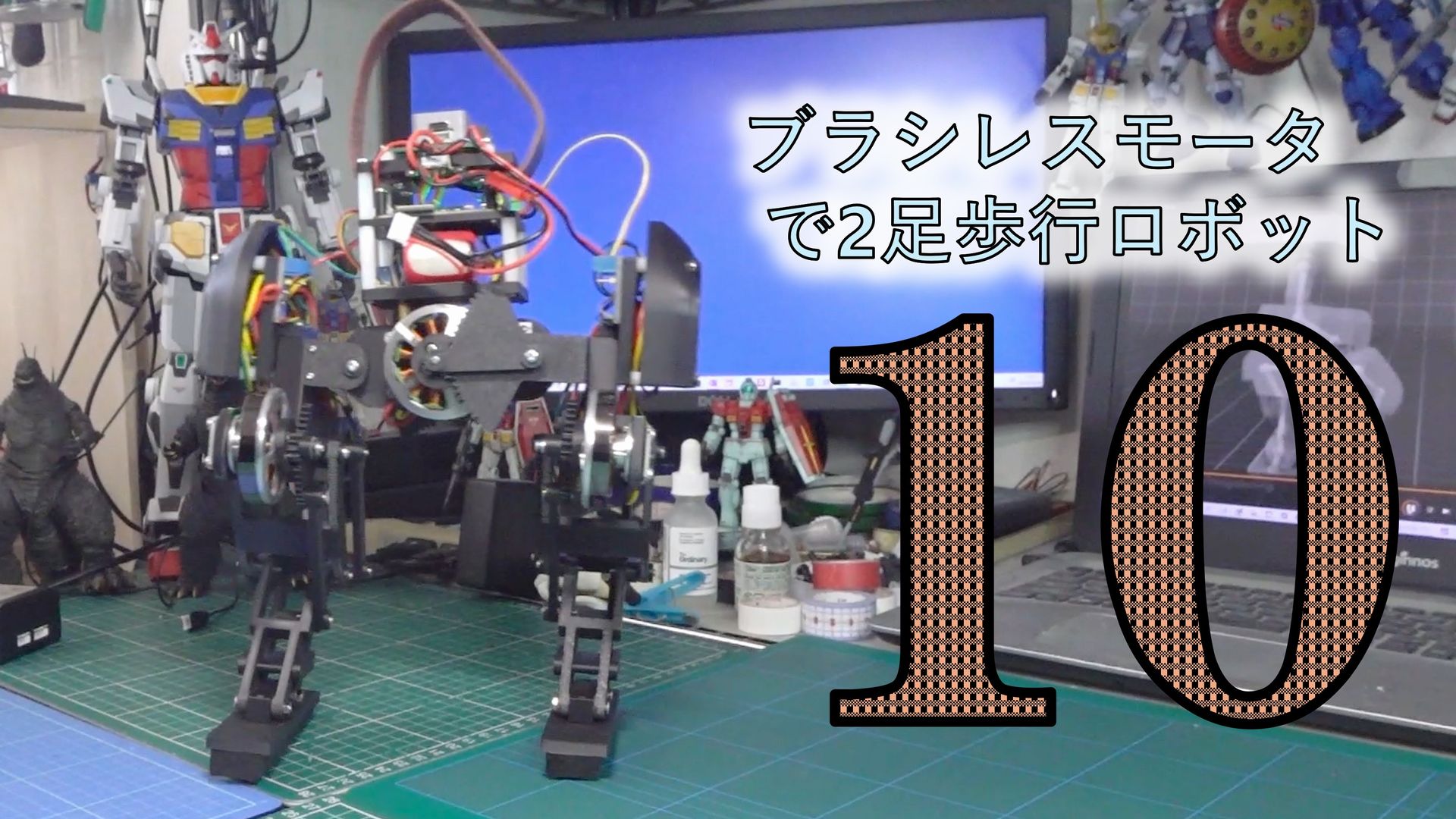
更に足の前後移動のタイミングを調整して歩行周期を上げてみました。
だいぶ良い!まだ最適化の余地はありそうだけど
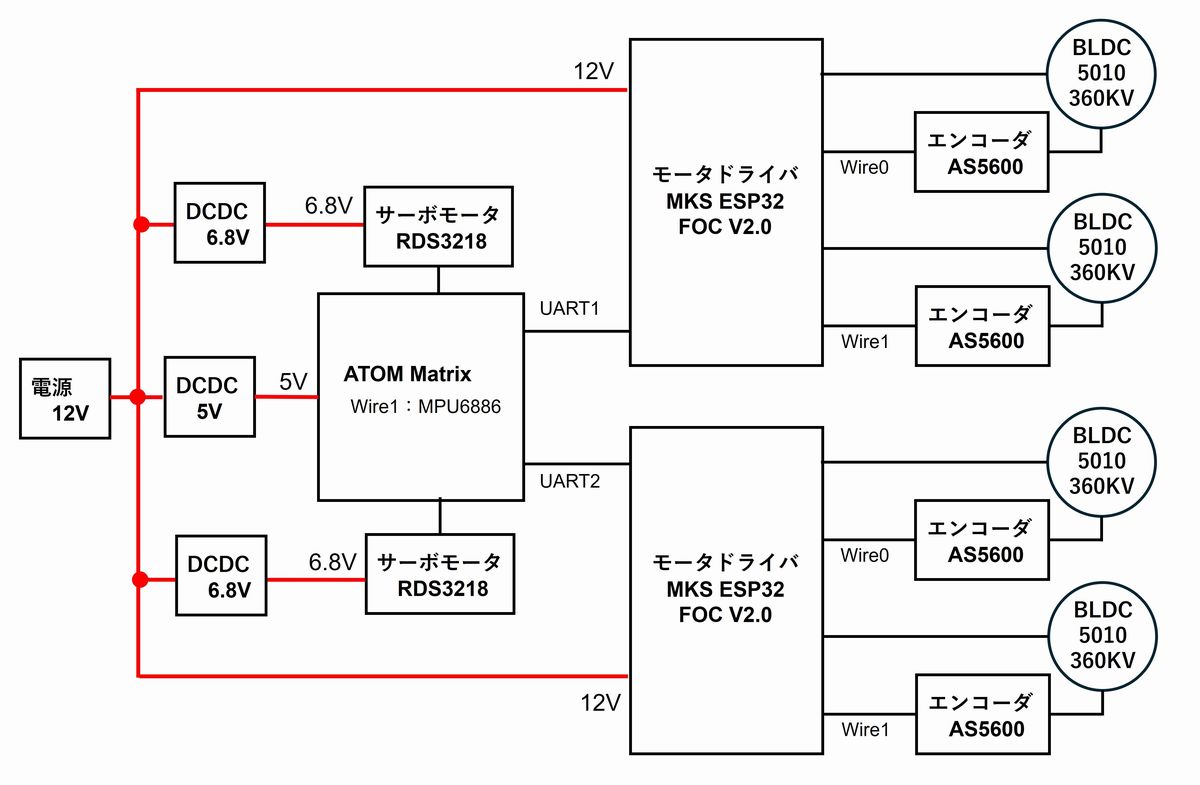
構成
最後に本ロボットの構成を簡単にまとめておきます。
-
- ATOM Matrix

- ATOM Matrix

-
- モータドライバ MKS ESP32 FOC V2.0

- ブラシレスモータ 5010 360KV

- 磁気エンコーダ
サーボモータRDS3218が結構電気喰いそうだったので、サーボ1個に対して1個の降圧DCDC (6.8V) をマンツーマンで使用してみました。
おわりに
ここでは2足歩行ロボット検討を再開してロール軸追加の3自由度ロボット足を製作しました。
歩行まで確認でき、今後ロール軸サーボの応答などを見極めながら最適化進めたいと思います。
次は足裏かまぼこリベンジだな pic.twitter.com/R3XDXNMeS4
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2025
やっぱロボットいじりは楽しいよ。