ブラシレスモータで2足歩行ロボット7 ー ロール軸BLDC導入 ー
本記事にはアフィリエイト広告が含まれます。
前回は片足3自由度の2足歩行ロボットの足上げ歩行動作について検討しました。
ブラシレスモータによる2軸のリンク機構の足とロール軸にサーボモータを使用しての片足 自由度3のロボットです。
歩行動作まで確認したのですが、ロール軸のサーボモータの応答に不満が生じたので
思い切って股関節もブラシレスモータにしようと思います。

目次
ロール軸ユニット製作
股関節のロール軸サーボをブラシレスモータに変更します。
早速 設計して3Dプリントしました。
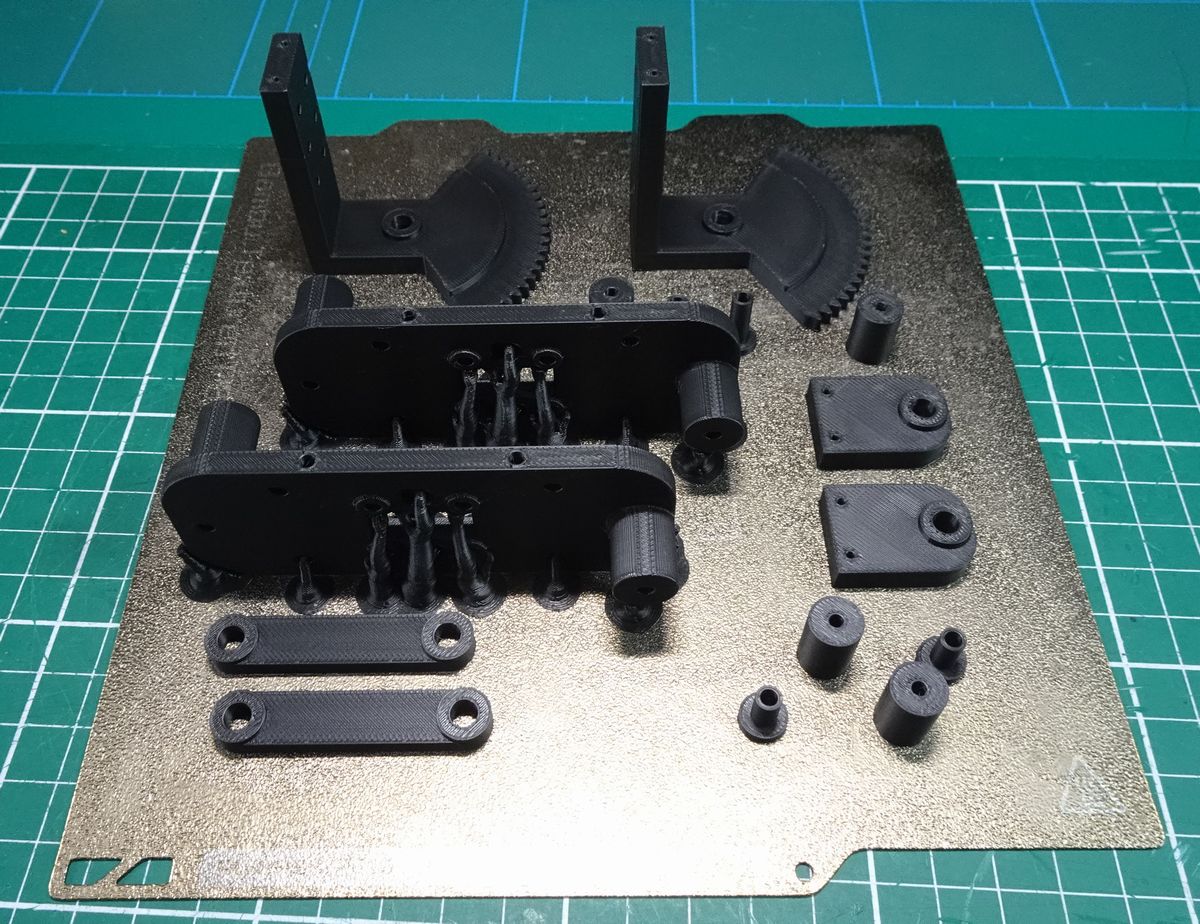
完成!いい感じ1発OK
BLDCロール軸ユニット
さてどうでしょう pic.twitter.com/qUEmF1qE1w— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2025
ギア比は足の5.6に対してすこし大きめの7としました。
コントローラは手元にあった MKS ESP32 FOC V1.0 を使用しました。

足を接続して、ロール軸動作味見
ロール軸はPS4コントローラで動かしています。
ロール軸動作確認
トルクも十分そうだな
やはりブラシレスモータは高速だし静かでいいや pic.twitter.com/axYIsalxNb— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2025
応答もいいし、トルクも問題なさそう。
動作音もほぼないし やっぱブラシレスモータ最高やね。
ロボットを持つところ
開発を進めるにつれ どんどんロボットが重量を増し取扱いに注意が必要となってきました。
指挟んだらケガするよな。。。
そんなとき以下の動画がタイムラインに流れてきました。
Get wiggling! More creative moves for the robot Mini π are on the way…😍#bipedal pic.twitter.com/PU7CsXZtyi
— High Torque Robotics (@HTrobotics) December 23, 2024
これいいですね。安定化電源みたいにロボットに取っ手ついとる。
そういうわけでマネして家のにも取っ手つけてみた。
取っ手は牛革
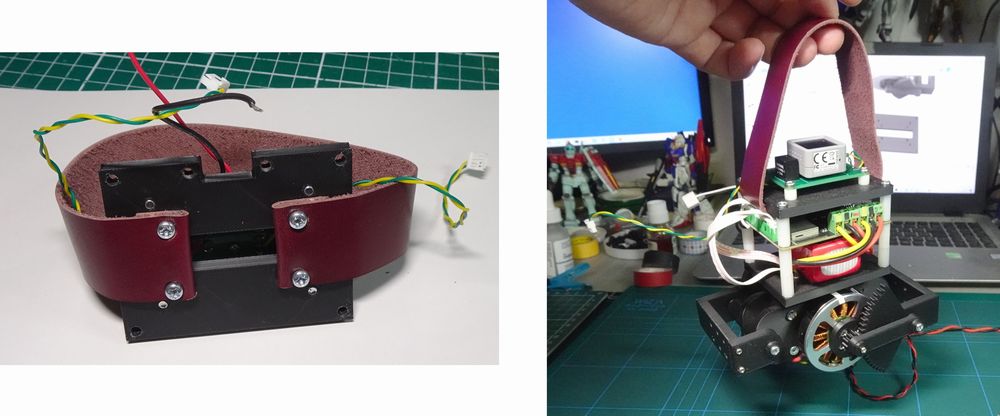
便利よ
保管時は吊るしておける pic.twitter.com/rbc3301xRN
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2025
通信問題
ロボットを完成させようと製作を進めようと思った矢先。。
あ。。
ロール軸ユニットとの通信どうしよう。。
ソフトウェアシリアルでいいか.. pic.twitter.com/0Uvn3wVGZI— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2025
ロール軸のブラシレスモータドライバ (MKS ESP32 FOC V1.0) とマスターコントローラ ATOM Matrix 間で通信するリソースがないことに気づきました。。。
ESP32は3つのハードウェアシリアルポートを持っています。
本ロボットでATOM Matrixは書き込み用、右足モータドライバ用、左足モータドライバ用とすでに3つのシリアルポートを使用しております。
いつもこうだ。。。
ソフトウェアシリアル
しょうががないのでソフトウェアシリアルを試してみました。
ESP32でこれまでソフトウェアシリアルを使用したことがないのでかなり不安ですが。。
以下のライブラリを使用
ESPSoftwareSerial : https://github.com/plerup/espsoftwareserial/
結論から言うと、ダメでした。
通信精度も低くボーレートも高く出来ません。。
以下の動画ではマスターコントローラ ATOM Matrix のIMUセンサによる角度に応じてソフトウェアシリアルでロール軸モータを制御しています。
たまに変な値来てビリビリゆうとる。。
マジで通信考えないとな pic.twitter.com/E0uJvu2GtI— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2025
たまにへんな値になったりで遅いしで全然ダメだった。
ちなみにボーレートは9600bps
ハードウェアシリアル
試しにハードウェアシリアルにすると問題なく動作
由緒正しきハードウェアシリアルであれば こんなにも健康的な股関節になれるのにさ
それはそうと春のアイテムとして持ち歩きたいくらいに可愛いわ pic.twitter.com/qUMpIPxFEG
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2025
機体の傾きに応じてロール軸がスムーズに追従して動いております。
ちなみにボーレートは1Mbps
通信システム検討
世の中のロボット用ブラシレスモータがCANなどのバス通信機能を持っている理由が実感としてよく理解できました。
トホホ
しょうがないので、ここでは以下の通信構成を試してみます。
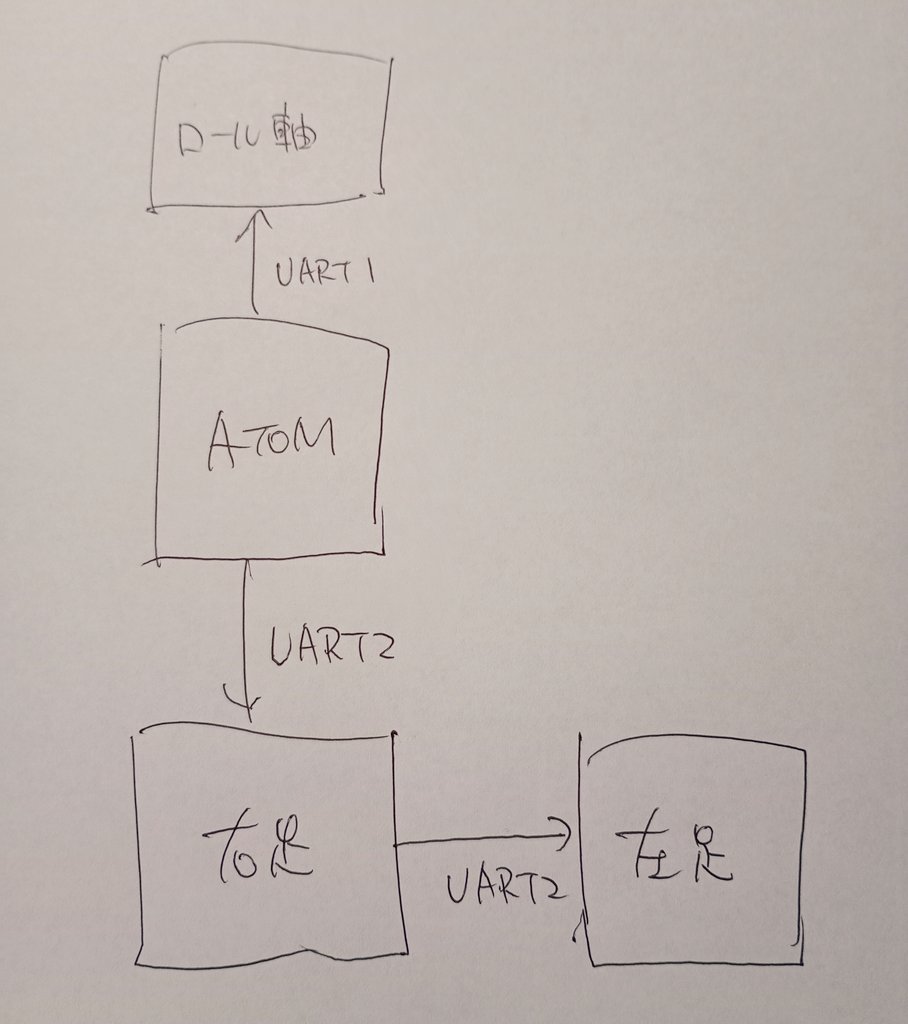
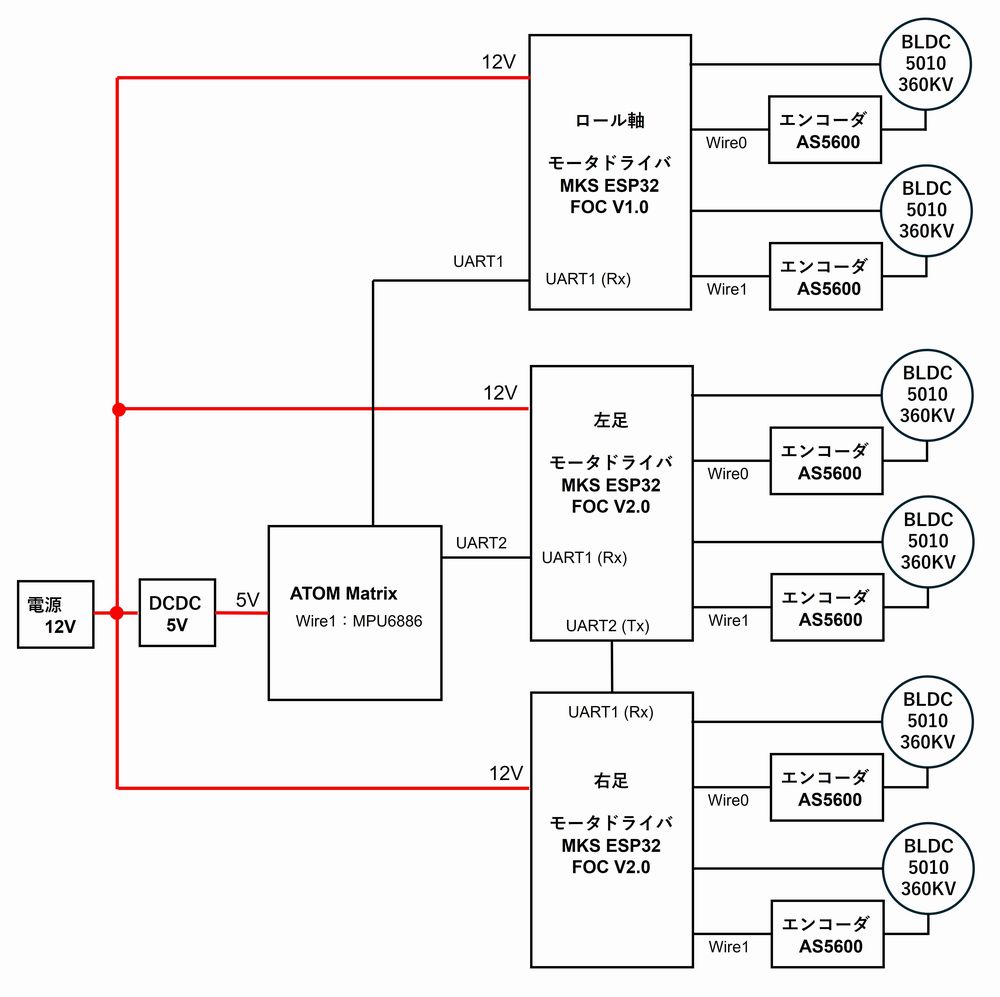
マスターのATOMからロール軸とはハードウェアシリアルで通信して、のこりのハードウェアシリアルで両足分の制御データを片足に送って片足から他方にデータを送るというシステムです。
ちなみに足の制御データとしては足の前後、上下の座標を送っています。
うまくいきました!
あまりスマートじゃないけど なんとかシリアルポートやりくりして完成
やっと歩行の検討に入れる https://t.co/nJWJQLf9RQ pic.twitter.com/TqbLOyAUBH
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2025
ロール軸も足も問題なく動いております。
いつかはCANなどのバス通信も検討しないといけませんが、ここではこのシリアル通信システムで行こうと思います。
構成
構成を概要をまとめておきます。
歩行味見
動作システムが完成いたしましたので、早速歩かせてみました。
おー歩いた歩いた! かなり静音プリウスかよ
ロール軸の応答かなりいい感じ
着地時の振動も小さいし(ここはPD制御でもっと詰めれる)最適化して振り子のようにスタスタ歩けるようになりたいね。 pic.twitter.com/JBOLFgLZTk
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2025
歩いた歩いた!
とりあえずロール軸サーボの時の歩容そのままで歩かせてみました。
ブラシレスモータによるロール軸の応答はかなりいい感じで 着地時の振動も小さいです。
もろもろ最適化して機体を小気味よく振り子のように揺らしながらスタスタ歩けるようになりたいね。
おわりに
ここではロール軸の機構をサーボモータからブラシレスモータに変更してロボットを製作しました。
軸追加による通信リソース不足に悩まされましたが持ち前の機転の良さで何とか動くロボットを完成させることができました。
しかし近いうちにバス通信は検討しないといけませんね。。。
とりあえず歩行動作も確認できましたので、これよりブラッシュアップしていきたい所存です。
ではまた