シリアルリンク 2足歩行ロボットの製作3 ー 足踏み動作 ー
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータを用いたシリアルリンク機構の足を有する2足歩行ロボットとして4自由度の2脚ロボを完成させました。
ここでは足踏み動作の検討を実施しましたので報告いたします。
目次
足裏
足裏には前後に低反発クッションを貼り付けました。
BDXドロイドの足裏にも土踏まずが設けられており、これを模倣しました。
大変貴重なボトムビュー
なるほど足裏は土踏まずを設けてるんですね https://t.co/csX9fBbqYG— HomeMadeGarbage (@H0meMadeGarbage) April 9, 2025
土踏まずの効能を想像するに、線状で接地するより4点で接地したほうが重心を所望の位置に定めやすいということなのだろうと考えております。
足上げ動作
足踏み動作実現に向けてまずは足上げ動作の確認を実施しました。
だめだ ロール軸のトルク足らん
ギア比上げよう一番懸念してたヒザの応答はかなり良くて喜び pic.twitter.com/8lCBVOMouu
— HomeMadeGarbage (@H0meMadeGarbage) April 29, 2025
ちょっと股関節部のロール軸モータのトルクが足りない印象。。。
今回は全モータのギア比を5.6としました。
前回のロボットでも足のモータのギア比は5.6でしたが、ロール軸のギア比は7.0でした。
Original Biped Robot Using Brushless Motors
足の自由度は低いけどBDXドロイドのような歩行を目指した pic.twitter.com/5B913Kr1qD— HomeMadeGarbage (@H0meMadeGarbage) April 10, 2025
試しにギア比を下げてみたところ やはりトルク不足という結果となりました 🙄 。
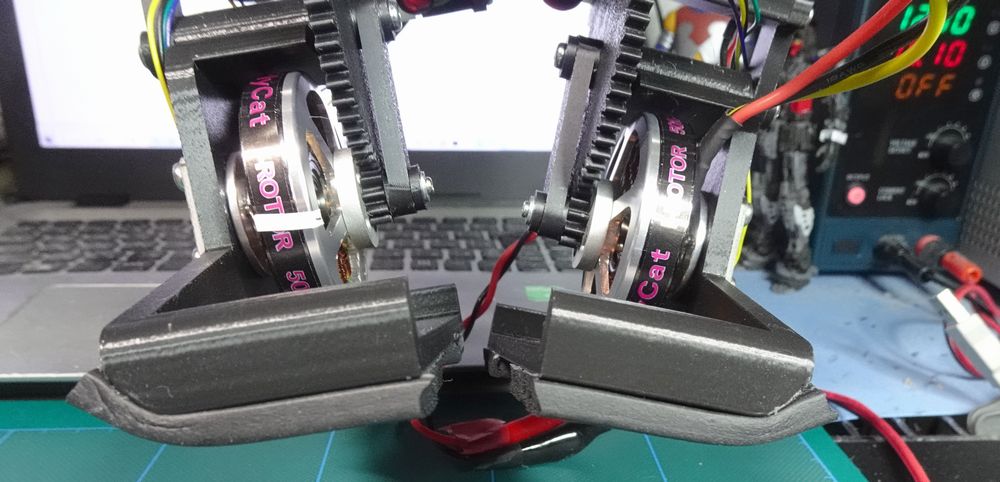
ロール軸トルク向上
ロール軸のギア比を上げてトルクを向上させます、
ギア比を5.6から8.0に大きく増強。
新股関節 pic.twitter.com/KxueARvFRU
— HomeMadeGarbage (@H0meMadeGarbage) April 29, 2025
うまいこと組みこんで足の間隔は変更しないようにしました。
新股関節 pic.twitter.com/cj3Ul4cVqb
— HomeMadeGarbage (@H0meMadeGarbage) April 30, 2025
またこのタイミングで注文していたモータとギアを固定するアルミ加工品も届きましたので、3Dプリント品と交換しました。

ロール軸トルク向上によって足上げ動作が大きく安定しました!
ロール軸ギア比 5.6→8.0にしてパワーアップ
見よこの勇ましい四股を pic.twitter.com/XGquoAAOgj— HomeMadeGarbage (@H0meMadeGarbage) April 30, 2025
見よ!この差を!
ロール軸ギア比の研究 pic.twitter.com/MsLw4dDhEn
— HomeMadeGarbage (@H0meMadeGarbage) April 30, 2025
トルク検知
足上げ動作をPSコントローラのボタンきっかけで実施できるようにしました。
足踏みに向けて
現状はボタンで足上げモータのトルクで接地検知して自動左右切換を目指す
足首モータのトルク検知でいいかな 恐らく pic.twitter.com/7hnGkFjG3B— HomeMadeGarbage (@H0meMadeGarbage) April 30, 2025
足上げは以下のシーケンスで動作
・地面を蹴って機体を傾ける
蹴る高さと時間はパラメータ値として指定
・蹴り上げ後に足を上げる
上げる高さと時間はパラメータ値として指定
この間ロール軸は機体傾きのPD制御で足を傾けている
・蹴り上げによって傾いた機体が下がるタイミングをIMUの角速度で検知して
足高さを初期値に戻す
この足上げ動作の左右の切り替えを自動化して足踏み動作を実現したいと考えています。
左右切換は足の接地を検知して他方の足上げ動作を開始するようにしたいので、
まずは接地を検知するべく、足首モータのトルク(モータ負荷電流)を測定します。
足上げ動作時の左右の足首モータの電流の差を観測
トルク検知 pic.twitter.com/rPSCOkr9I5
— HomeMadeGarbage (@H0meMadeGarbage) May 1, 2025
トルクの検知によって足動作のステートを検知できことがわかりました。
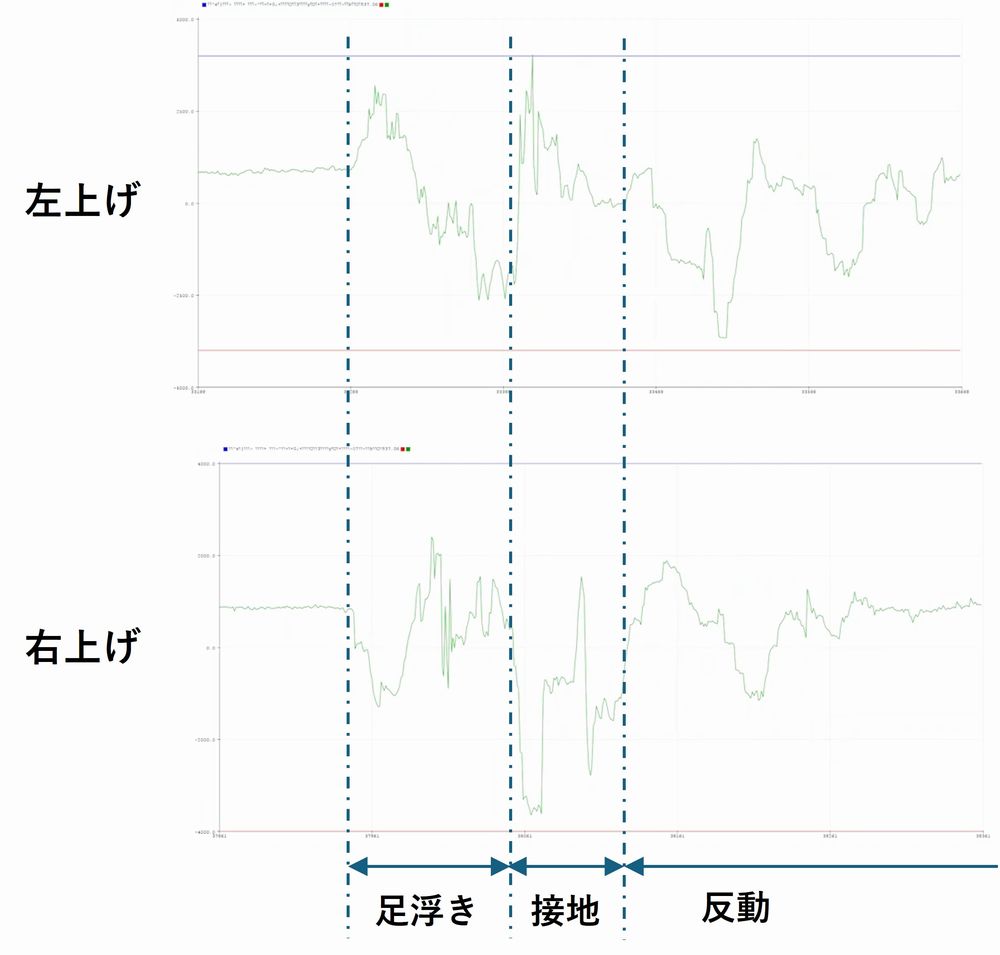
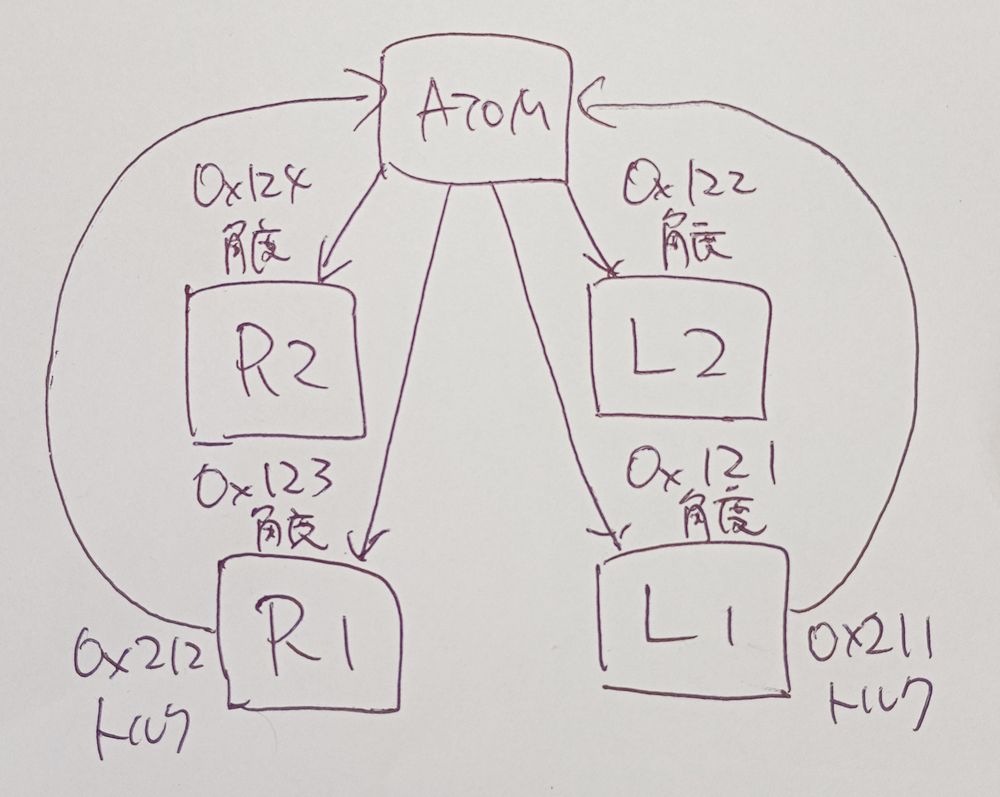
左右の足首モータのトルク(電流値)はCAN通信で中枢コントローラ(ATOM Matrix)に送信して接地検知します。
足形状検討
トルク検知によって足上げ後の接地が検出できるようになったので、左右切換を自動化して足踏み動作を実施します。
足踏み
ちょっとガチャつく
足底太過ぎるからBDXのように角丸めるか pic.twitter.com/8ZkSqFdgaC— HomeMadeGarbage (@H0meMadeGarbage) May 1, 2025
ちょっと足上げで機体をスムーズに傾けることができてないようでガチャついています。。。
足底が太いかなぁ。。
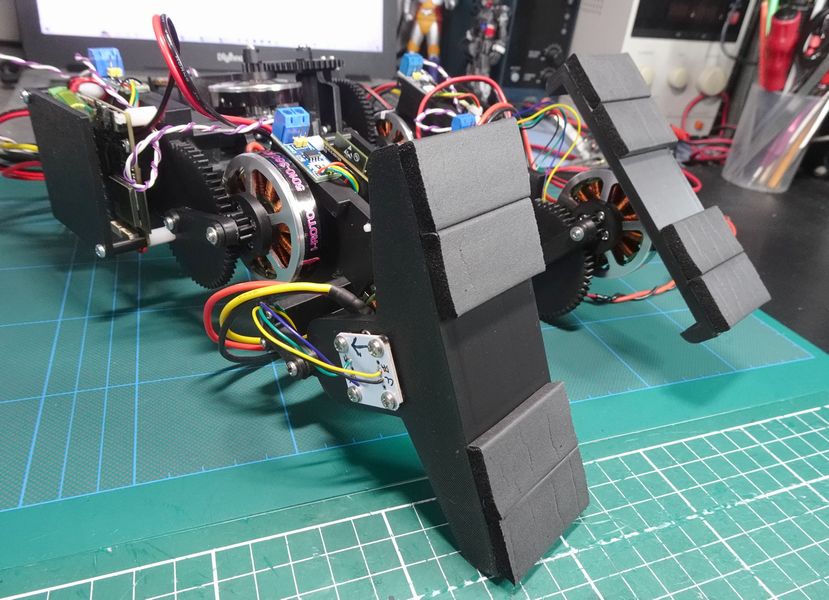
ということで足底のエッジを丸めてみました。
足エッジ丸めによって機体傾きがスムーズに移行でき足踏みがええ感じになりました。
足底の形状はコレで良さそうかな
足上げやすくなった。ロール軸の制御の吟味に入りましょう pic.twitter.com/4zyjAUOprb
— HomeMadeGarbage (@H0meMadeGarbage) May 1, 2025
足踏み動作
接地検知の感度をトルクの加算平均によるノイズの取り具合や判定変動範囲をパラメータとして調整し足踏み動作を精査いたしました。
ホビーロボットを逸脱し小学生のような足踏みを目指しているのだが背中が見えてきたよ pic.twitter.com/ewrg2A87nQ
— HomeMadeGarbage (@H0meMadeGarbage) May 2, 2025
足上げ動作切り替えやロール軸によるウエイトシフトがシームレスに連動して実施され、
とてもホビーロボットとは思えないような足踏み動作が実現でき (そうな予感が増し) ました。
ここからはバッテリ搭載やロール軸の追加などで機体上部の重心が大きく変わるので
更なるブラッシュアップは次回以降に実施します。
おわりに
ここではブラシレスモータを用いた4自由度 シリアルリンク機構の2足歩行ロボットの足踏み動作の検証をしました。
IMUやモータトルクのセンシングによってスムーズな足踏み動作が実施できました。
次回は歩行動作に挑戦いたします!
それではまた