ROBSTRIDE 05 で1脚ロボット
本記事にはアフィリエイト広告が含まれます。
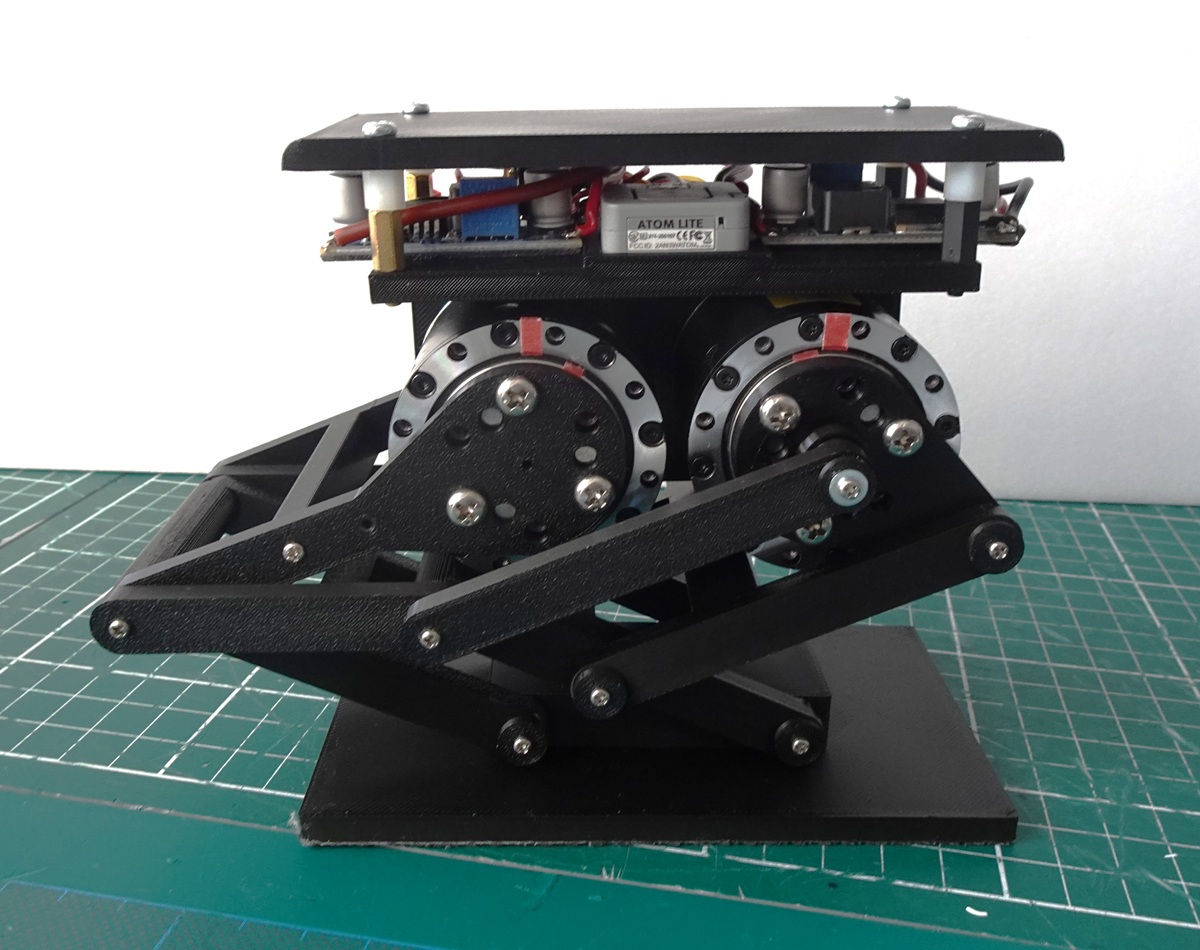
以前 2個のRobStride 05 で1脚ロボを製作しました。
ここではこの1脚ロボの動作を掘り下げてみました。
https://t.co/1KsNoXiFGT pic.twitter.com/EGtLgWxtFB
— HomeMadeGarbage (@H0meMadeGarbage) December 24, 2025


MuJoCo シミュレーション
1脚ロボの動作検証にMuJoCoシミュレーションを用います。
粛々とモデル製作
キーホルダーみたい#MuJoCo pic.twitter.com/zVUj0qet4m
— HomeMadeGarbage (@H0meMadeGarbage) January 23, 2026
MuJoCo の <equality><connect> でクローズドループリンク機構も構築できます。
クローズドループリンク機構 構築#MuJoCo pic.twitter.com/zIOx9QrH09
— HomeMadeGarbage (@H0meMadeGarbage) January 24, 2026
手動でモータ角度をスライダで動かしてバク宙ジャンプ動作を確認できました。
まさかねぇ。。 pic.twitter.com/m8U4KZILpU
— HomeMadeGarbage (@H0meMadeGarbage) January 24, 2026
RobStride 05 は hinge joint + Position actuator で記述してモデル化
|
1 2 |
<joint name="hinge_m2" type="hinge" pos="0.025 0.014 0.109995" axis="0 1 0" range="-0.26 0.61" damping="0.001"/> <position name="m2_pos" joint="hinge_m2" kp="10" inheritrange="1" forcerange="-1.6 1.6"/> |
以前に製作した1個の RobStride 05 による足ロボでモータのモデルと実機の擦り合わせは実施しているので、とんでもなく大きな誤差はないと考えています。
実機でジャンプ
シミュレーションでおもしろジャンプ動作が確認できましたので実機でもやってみます。
実機では天板を追加 (脳天からおちてコントローラとか壊れたらいやだから)。
実機でジャンプ!
なるほど pic.twitter.com/7aDPtBskAX
— HomeMadeGarbage (@H0meMadeGarbage) January 24, 2026
さすがにバク宙は無理か。。
ちなみに実機構成は以下の通り
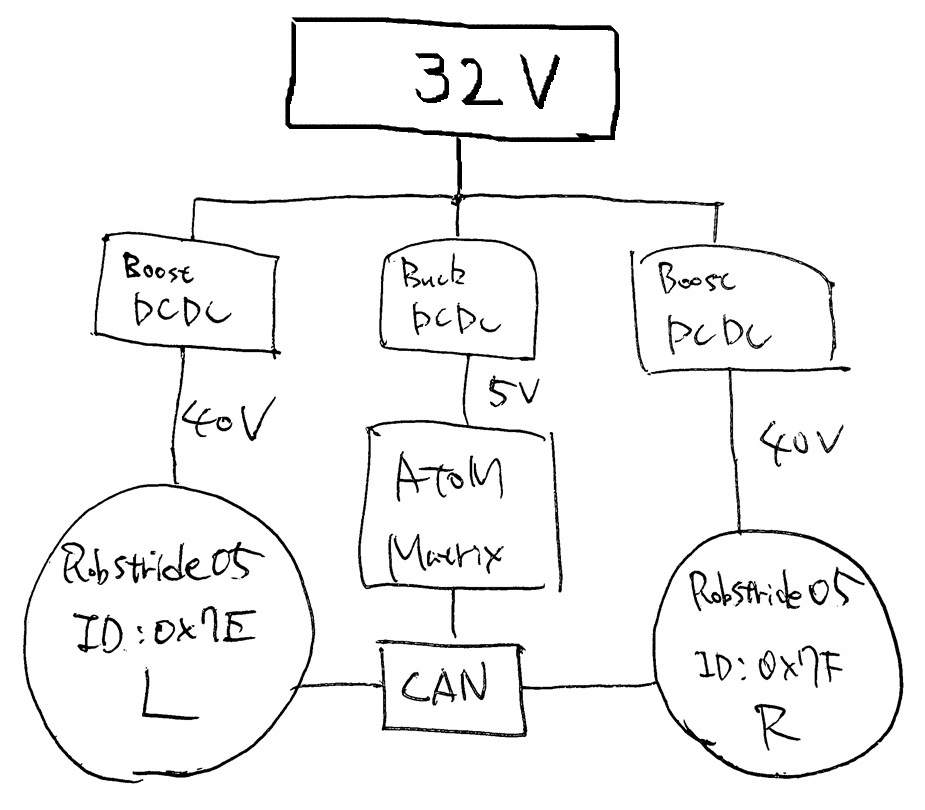
安定化電源 32Vから昇圧DCDC 40Vでモータへ 降圧DCDC 5Vでコントローラに給電しています。
コントローラ用 5Vを生成してるDCDCの公称耐圧は28Vなのでマネしないように
(でもこの手のHVプロセスって36Vくらいイケるっしょ あっでもマネしないように)。
シミュと比較。ちょっと足を縮めるののが早いか
足畳むのちょっと早いか
あと48V電源ほしいな pic.twitter.com/Fcj6JCxlIF— HomeMadeGarbage (@H0meMadeGarbage) January 24, 2026
足をもっと収縮できるように筐体ちょっと改修
高さ十分だけどねぇ pic.twitter.com/Ura9hgWXcs
— HomeMadeGarbage (@H0meMadeGarbage) January 25, 2026
ジャンプの高度が増す。
シミュと同じタイミングで足を収縮するように調整してジャンプ
理想と現実#Robotics pic.twitter.com/n2UQU0bvc1
— HomeMadeGarbage (@H0meMadeGarbage) January 25, 2026
やはりバク宙は無理そうだなぁ
しかしこんなにジャンプできるロボは初めてです。
Sim.との差の要因は多数あるでしょうね。
・モータモデル誤差
・筐体誤差 (天板やコントローラ、電源ラインなど)
モータ電圧も電流能力が十分にある48Vで試してみたいです。
やはりQDD使用の場合はHV供給がネックになります。
おわりに
ここでは 2個のRobStride 05 を用いた1脚ロボのジャンプ動作の検証を行いました。
Sim.のようなバク宙ジャンプはできませんでしたが、これまで経験したことのない高度のジャンプ動作を実現しました。
さすがロボQDDはレベルが違うわ。
今後QDDを取り扱うに際して、HV電源供給問題が付きまといますね。
自分なりの良い手法を考えたいです。
ではまた