
3軸 姿勢制御モジュール SHISEIGYO-3 基板製作 ーリアクションホイールへの道34ー
本記事にはアフィリエイト広告が含まれます。
前回は3軸 姿勢制御モジュール SHISEIGYO-3に起き上がりボタンの追加などの改良を加えました。
今回はSHISEIGYO-3の制御基板を製作したので報告させていただきます。
目次
基板設計
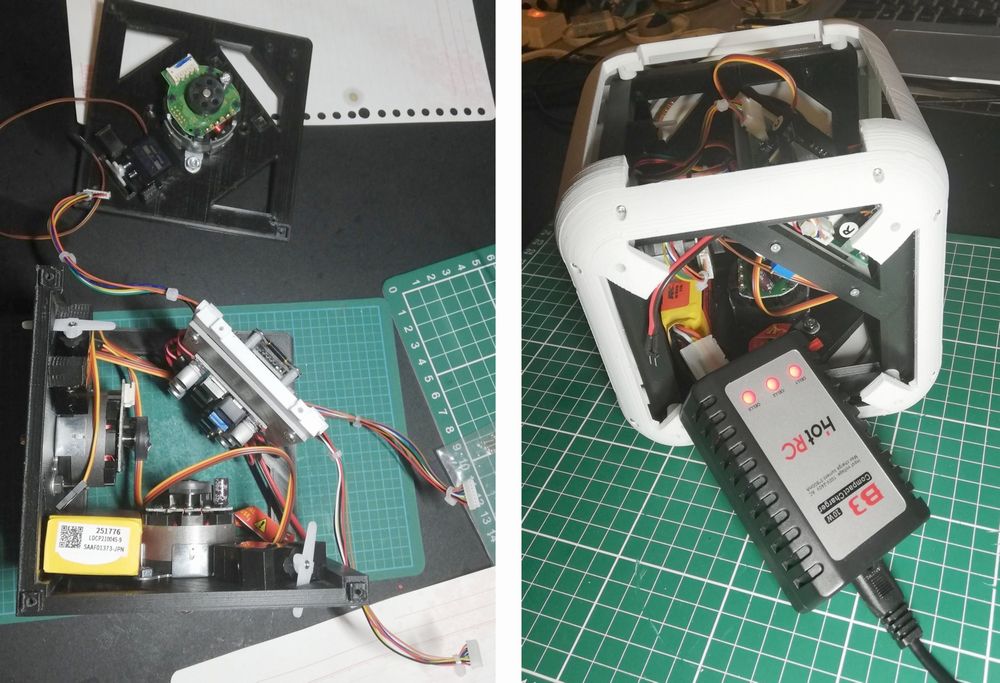
これまでSHISEIGYO-3はユニバーサル基板に手配線で構築しておりました。
できた。
これで問題なければ ボード設計に入る pic.twitter.com/IiSj9hRmb2— HomeMadeGarbage (@H0meMadeGarbage) January 21, 2021
配線がかなり大変なので基板を製作しようと思い立ちました。
これが私自身生まれて初めての自費製作基板となります (業務での基板製造経験はございます)。
EAGLE
PCB設計ツールにはFusion360でもお世話になっているAUTODESKのEAGLEを採用しました。
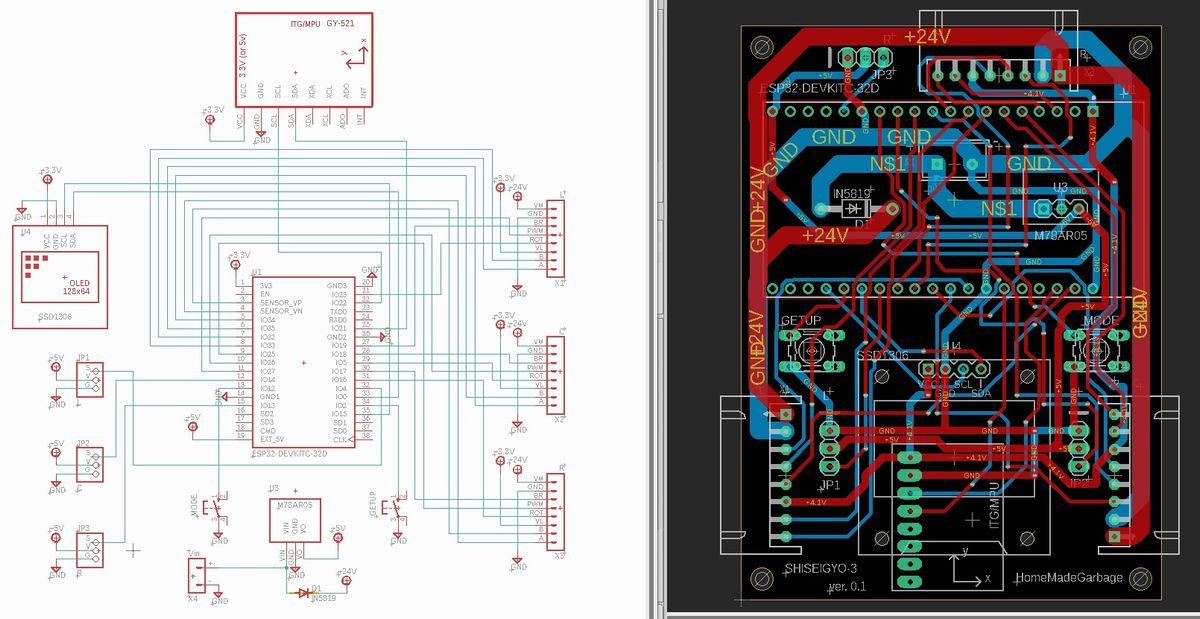
ESP32やIMUセンサMPU6050、ディスプレイモジュールを接続するだけの基板なので比較的簡単にできました。
モータが電流流れるのでモータ電源ラインだけ引き回しに注意しました。
EAGLEの使用方法は以下のサイトが非常に参考になりました。
https://tool-lab.com/mac-eagle-101-1/
基板製造
PCB製造はseeed社を使用しました。
2021年1月31に基板設計データをアップ・発注して2021年2月12に基板が到着しました。
工程も早くサイトでリアルタイムに確認できました。春節前に上がってよかったです。
費用は60×82mm 基板10枚で製造費$4.90、送料$19.33と非常に安くできました。
届いた
忙しいな♪。.:*・゜♪。.:*・゜♪。.:*・゜ pic.twitter.com/XjC8iidMVd— HomeMadeGarbage (@H0meMadeGarbage) February 12, 2021
参考
基板実装
基板に部品を実装していきます。
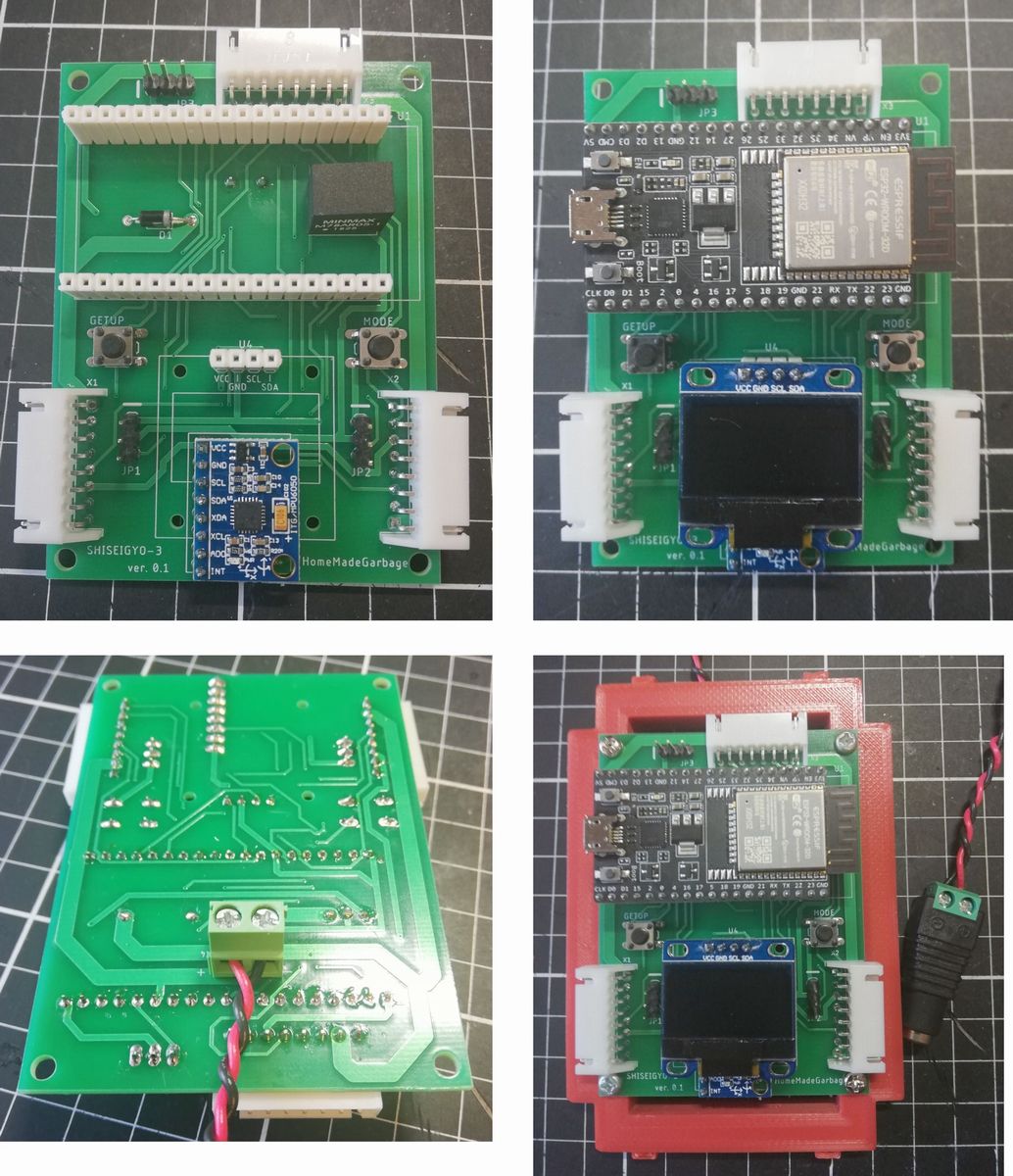
基板によって非常にすっきりカッコよく仕上がりました。
動作
無事に動作も確認できました!
おわりに
ついに基板もできましたので、プログラムをブラッシュアップしてSHISEIGYO-3の製作レシピの執筆にとりかかりたいと思います。
それでは次の道でお会いしましょう!
次の記事
関連記事
 SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
 SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
 バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー
バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
 3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
2軸制御を完成し、3軸制御にチャレンジしています。
バンドブレーキの取り付けで、サーボのアームがホイールと接触してしまい取り付けができませんでした。
支点の穴は簡単にずらすことは可能ですが、アーム側は躯体の3Dを変更しなければなりません。
仕方なく、ブレーキなしで組み立てを行い、倒立動作の確認を行っています。
辺倒立はすんなりと成功したのですが、点倒立で苦労しています。
KwLR 値ですが、0.0 まで落としましたが安定しません。以前のブログにマイナス値も有りとあったような気がするのですが…。
ご教示いただけると幸いです。
お時間ありましたら、躯体の変更のやり方などもご教示の程お願い致します。( Fusion 360 は少し使えます)
ありがとうございます。
ホイールのサイズは直径120mmでしょうか?
サーボのアームに接触する要因が分かりません。
辺倒立は3辺すべてで実現しましたでしょうか?
ご確認のほどよろしくお願いいたします。
お手数をお掛けします。
ホイールのサイズは直径120mmで間違いありません。
後で Fusion 360 に body を読み込んで、ホイールを追加し確認してみます。
倒立を確認したのは、昨日の時点で中心軸のみでしたが、ご指摘を受け、本日左・右軸の倒立も確認しました。
改めて、点倒立にチャレンジしてみましたが不成功でした。
中心軸、左右軸両方のバランスをどうとるか、難しさを痛感しています。
申し訳ありません。
先ほど、ホイールの直径は120mmで間違いありませんと報告しましたが、Fusion 360 で確認したところ現物との違いが明らかで、再度測り直したところ125mmありました。
交換に応じてもらえるかわかりませんが、メーカーに交渉してみます。
本当に申し訳ありません。
ありがとうございます。
3辺での辺倒立は問題なくできたのですね。
ホイールの直径が125mmだったのですね!
ちなみに購入先はレシピに掲載したショップですか?
購入先は、レシピに掲載の Ali Express 経由 Ecomponents HUB Store です。
ありがとうございます。
それはおかしいですね。
サイズは直径120mmと明記されていますし
問い合わせ結果が出ましたらご教示ください。
メーカーより
「 Hi,it seems that we sent the wrong size,can we send you a new one if you need?? 」
との回答があり、早速送付を依頼しました。
正規のホイールが届くまでに何とか点倒立を実現させたいと思っています。
メーカーより代品を送ってくれる旨の連絡がありましたので、改めて点倒立にチャレンジしています。
3辺倒立までは再現できるのですが、その先になかなか進めません。
3辺倒立までは安定しているとのことなので
KpLR、KdLR 、KwLR
KpC、KdC、KwCはいじらなくていいかもしれません。
点倒立時の安定性に効く
KC、KC2を調整してみてはいかがでしょうか。
KpLR=12.0, KdLR=22.0, KwLR=1.65
KpC=12.0, KdC=22.0, KwC=1.4
現在のパラメーター値です。
3辺倒立はほぼ完ぺきにできていると思うのですが、点倒立がなかなか達成できません。
KC⁼8.6,KC2⁼11.5,KLR=11.5 で倒立しかかりましたがほんの一瞬ですぐ暴走状態となってしまいます。
ほかの数値ではすぐ暴走状態となってしまいます。
辺倒立では、Kw値が暴走を抑える作用をしていたようですが、点倒立でほかに安定性に効く要素はありませんでしょうか。
アドバイスの程お願い致します。
>点倒立でほかに安定性に効く要素はありませんでしょうか。
基本的には全パラメータが安定性に影響するので
うまく調整しながら実機見ていただくしかないのですが、
例えば制御ループを変えてみてはどうでしょうか。
デフォルトではDelayが8msecだと思います。
これを半分の4msecにするなど。
点倒立に成功しました。
LRのパラメーターを再調整して辺倒立の精度を上げ、KC値・KC2値を調整したところ5分ほど点倒立を実現できました。
少し時間をおいてからも同様の結果が得られましたので間違いはないと思います。
最終的に、KpLR=27.2、KdLR=22.0、KwLR=3.0、KC=10.0,KC2=13.9,KLR=9.0 という値でした。
適切なご指導ありがとうございました。
ありがとうございます!
パラメータが多く大変だったと思いますが
点倒立実現されたようで安心いたしました。
今日、Ecomponents HUB Store よりホイールが送られてきました。
数量が1個しか入っておらず、早速メーカーへ連絡を入れたところ、「 now all wheel is 126mm 」との回答がありました。
ショップのHPも126mmに変更(詳細は120mmのままですが)となっており、120mmの入手は断念せざるを得ないのかなと思っています。
大変申し訳ございません。
海外製品なので仕様変更は皆無ではないと思っていたのですが、単体販売のほうも126mmになっていますね。。。
https://ja.aliexpress.com/item/4000933401786.html?spm=a2g0s.12269583.0.0.b23f1ec44Ca8oS
他にも多くの方にご迷惑をかけることになる可能性が高いので一旦レシピ販売を停止いたします。
ご教示いただき誠にありがとうございます。
アルミ板で120mmのホイールを作りチャレンジを再開しました。
点倒立も前回より精度よく達成したと思うのですが、起き上がりがうまくいきません。
無調整で1cmほど起き上がり、その後バンドの位置、servoBrakeC、rotMaxC等変えてみましたが、動作にあまり変化が見られません。
サーボモーターですが、手持ちにTower Pro SG90があったので使用しています。
ほかにチェックポイントがありましたらご教示をお願い致します。
HomeMadeGarbage 様
SHISEIGYO-3ni にチャレンジしています。
辺倒立まではすんなりクリアできたのですが、点倒立で行き詰っています。
KpLR = 27.0; KdLR = 22.0; KwLR = 3.0; KpC = 12.0; KdC = 22.0; KwC = 1.4; KC = 18.0; KC2 = 2.0; KLR = 12.0
何か解決の糸口をご教示いただけると幸いです。
Homemadegarbage 様
SHISEIGYO-3-ni で苦戦しているところで、お母ちゃんに先を越されてしまいました。
前回、点倒立まで達成したのですが、起き上がりが達成できませんでした。
その後、電源の容量不足が判明しましたので、改めてHISEIGYO-3 に再挑戦したいと思います。